 電子發燒友App
電子發燒友App


最近在做基于MIPS指令集的單周期CPU設計,其中的ALU模塊需要用到加法器,但我們知道普通的加法器是串行執行的,也就是高位的運算要依賴低位的進位,所以當輸入數據的位數較多時,會造成很大的延遲,影響整個CPU的性能,為了減小這種延遲,遂采用超前進位加法器(也叫先行進位加法器),下面來介紹一下設計的原理:
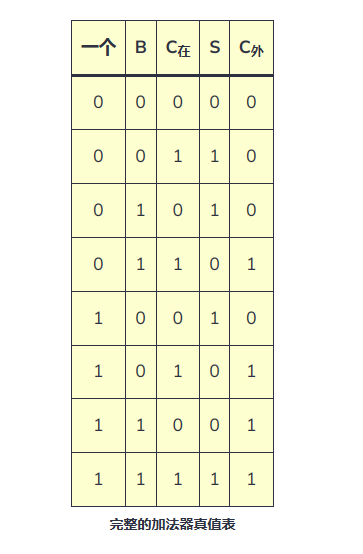
設二進制加法器第 i 位為Ai, Bi,輸出為Si,進位輸入為Ci,進位輸出為C(i+1),則有:
Si = Ai ⊕ Bi ⊕ Ci (1-1)
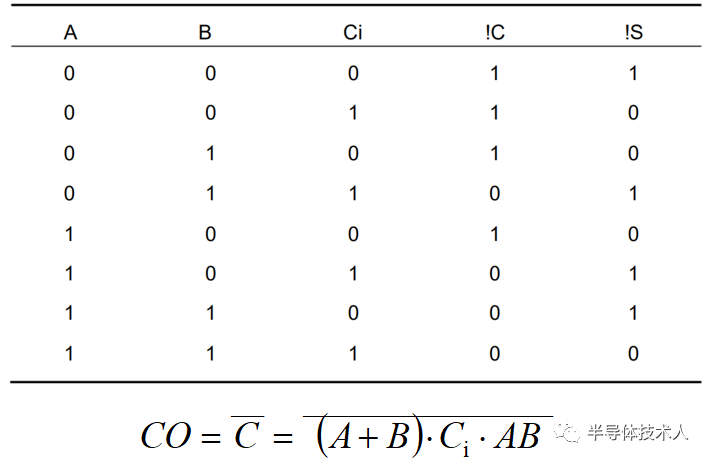
C(i + 1) = Ai * Bi + Ai * Ci + Bi * Ci = Ai * Bi +(Ai+Bi)* Ci (1-2)
令Gi = Ai * Bi , Pi = Ai + Bi,則: C(i + 1) = Gi + Pi * Ci
當 Ai 和 Bi 都為1時,Gi = 1, 產生進位C(i+1) = 1;
當 Ai 和 Bi 有一個為1時,Pi = 1,傳遞進位C(i+1)= Ci;
(說明:“*”表示與邏輯、“+”表示或邏輯、“⊕”表示異或邏輯)
因此Gi定義為進位產生信號,Pi定義為進位傳遞信號。Gi的優先級比Pi高,也就是說:當Gi = 1時(當然此時也有 Pi = 1),無條件產生進位,而不管Ci是多少;當Gi = 0 而 Pi = 1時,進位輸出為Ci,跟Ci之前的邏輯有關.
第一步:設計4位超前進位加法器 (至于為什么要先設計4位的,后面有詳解)
舉例:設4位加數和被加數為 A 和 B,進位輸入為C_in,進位輸出為C_out,對于第 i 位的進位產生Gi = Ai * Bi ,進位傳遞Pi = Ai + Bi , i = 0,1,2,3 。于是各級進位輸出,遞歸的展開Ci,有:
C0 = C_in
C1 = G0 + P0*C0
C2 = G1 + P1*C1 = G1 + P1*G0 + P1*P0 *C0
C3 = G2 + P2*C2 = G2 + P2*G1 + P2*P1*G0 + P2*P1*P0*C0
C4 = G3 + P3*C3 = G3 + P3*G2 + P3*P2*G1 + P3*P2*P1*G0 + P3*P2*P1*P0*C0 (1-3)
C_out = C4
由此可以看出,各級的進位彼此獨立,只與輸入數據 Ai、Bi 和 C_in有關,而且并行產生,不就達到了設計目的——將各級間的進位級聯傳播給去掉了,減小了串行進位產生的延遲。
實現上述邏輯表達式(1-3)的電路稱為超前進位部件(Carry Lookahead Unit),也稱為CLA部件。通過這種進位方式實現的加法器稱為超前進位加法器。因為各個進位是并行產生的,所以是一種并行進位加法器。
4位CLA部件電路如圖1所示:

圖1:4位CLA超前部件電路
(可能有人就想到,如果要設計32位超前進位加法器,是不是可以按照同樣的方法直接推導到C32,就可以一次性并行產生所有位的進位。。。但是,我們想想,根據表達式,進位越往后,比如C5、C6......C31、C32,表達式會越來越復雜,這是因為增加了邏輯門的輸入端個數,將會使得電路中需要具有大驅動信號和大扇入門,這會大大增加門的延遲,起不到提高電路性能的作用,這種方法叫做全先行進位,而當位數較多時,很顯然這種方式并不現實,因此更多位數的加法器可通過4位CLA部件和4位超前進位加法器來實現,后面再細說)
* 4位超前部件完成了,現在來完成4位超前進位加法器:
首先每一位都會產生進位傳遞信號和進位產生信號,然后將四位數據分別產生的進位傳遞信號和進位產生信號送到4位CLA部件,供CLA并行產生每一位的進位信號Ci,然后再送回給每一位的低進位(C_in),就完成了4位超前進位加法器,聽不懂,沒關系,看下圖:

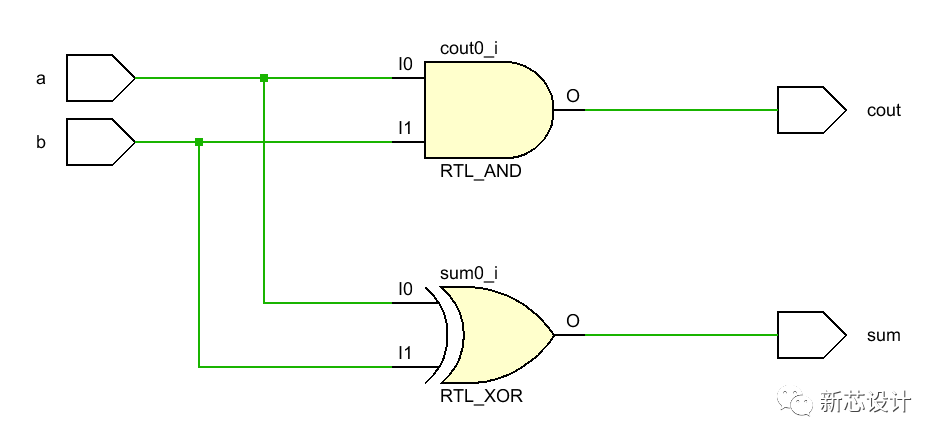
圖2:1位加法器

圖3:4位超前進位加法器
說明:1位加法器如圖2所示,輸入有A、B兩個加數,還有來自低位的進位C_in,輸出有得到的和 Si ,還有 進位產生信號Gi和進位傳遞信號Pi,之所以引出這兩個信號,是為了為后面的4位超前進位加法器做鋪墊,有人可能奇怪為什么沒有向高位的進位位,這是因為每一位的進位位是由CLA部件產生的,我們用四個如圖2所示的1位加法器和一個如圖1所示的4位超前進位部件,就組成了圖3所示的4位超前進位加法器,至此我們也就完成了4位超前進位加法器的設計。
那么,問題來了,4位超前進位加法器和我們最初要設計的32位超前進位加法器有什么聯系呢?有經驗的朋友很快就能反應過來,是不是可以用八組4位超前進位加法器級聯起來,完成32位的設計,但是,如果僅僅按照普通的級聯,也就是將八組4位超前進位加法器串聯起來,整個設計相當于組內超前進位,組間串行進位,這種方法是可行的,但不是我們的目的,因為它還是會影響整個系統的性能,為了達到最優的設計方法,我們采用組內超前進位,組間也是超前進位的方法進行設計,這種方法叫做兩級或多級先行進位加法器。
問題又來了,采用組內和組間都是超前進位的方式,到底該怎么設計呢?其實我們可以類比4位加法器的設計,為了完成4位的超前進位加法器,我們把1位加法器引出了它的進位產生信號Gi和進位傳遞信號Pi,供4位CLA使用,那么我們是否可以把4位超前進位加法器的進位產生信號Gm和進位傳遞信號Pm也引出來,然后用四組4位超前進位加法器和一個4位CLA完成16位超前進位加法器的設計呢,答案當然是可以的。
首先,我們對圖3所示的4位超前進位加法器進行封裝,并且引出進位產生信號Gm和進位傳遞信號Pm,如圖4所示:

圖4:封裝后的4位超前進位加法器
說明:圖4也是4位超前進位加法器,它和圖3的區別是引出了進位產生信號Gm和進位傳遞信號Pm,有心的朋友會發現它和圖2所示的1位加法器很相似,不同的地方僅僅是位數變成了四位,既然和1位加法器相似,那么我們就可以按照同樣的方法用四個圖4所示的4位超前進位加法器和一個CLA設計16位超前進位加法器,問題又來了,圖4所示的4位超前加法器的進位產生信號Gm和進位傳遞信號Pm怎么來的呢?
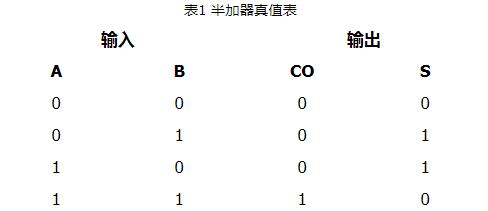
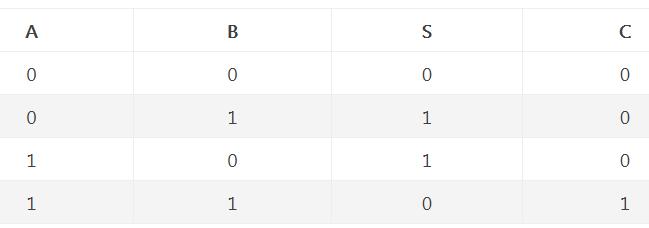
首先來看1位加法器的進位產生信號Gi和進位傳遞信號Pi是怎么來的:
既然是1位加法器,那么它的進位信號是C1,
由 C(i + 1) = Ai * Bi + Ai * Ci + Bi * Ci = Ai * Bi +(Ai+Bi)* Ci 得:
當 i = 0 時,即1位加法器的進位信號 C1 = A0 * B0 + (A0 + B0)* C0
我們把 (A0 * B0)叫做進位產生信號Gi,把(A0 + B0)叫做進位傳遞信號Pi 【原因前面已經講過】
顯然 Gi 和 Pi 分別時1位加法器的進位產生信號和進位傳遞信號.
再來看4位加法器的進位產生信號Gm和進位傳遞信號Pm該怎么來:
既然是4位加法器,那么它的進位信號是C4,
由 C(i + 1) = Ai * Bi + Ai * Ci + Bi * Ci = Ai * Bi +(Ai+Bi)* Ci 得:
當 i = 3 時,即4位加法器的進位信號
C4 = A3 * B3 + (A3 + B3)* C3
= G3 + P3*C3
= G3 + P3*G2 + P3*P2*G1 + P3*P2*P1*G0 +P3*P2*P1*P0*C0【在設計4位CLA時已經給出】
類比法得:把(G3 + P3*G2 + P3*P2*G1 + P3*P2*P1*G0)叫做進位產生信號Gm,(P3*P2*P1*P0) 叫做進位傳遞信號Pm,顯然 Gm 和 Pm 分別是四位加法器的進位產生信號和進位傳遞信號.
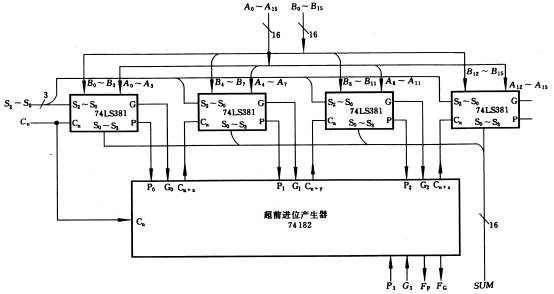
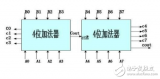
第二步:設計16位超前進位加法器
首先每一個封裝后的4位超前進位加法器都會都會輸出進位產生信號和進位傳遞信號,將四個4位超前進位加法器輸出的進位產生信號和進位傳遞信號輸入到4位CLA中,供CLA產生每一個4位超前進位加法的低進位信號,如下圖所示:

圖5:16位超前進位加法器
至此,我們完成了16位超前進位加法器的設計。
要想設計32位超前進位加法器和設計16位超前進位加法器一樣的方法,對16位超前進位加法器進行封裝,引出16位加法器的進位產生信號Gx和進位傳遞信號Px即可。
第三步:設計32位超前進位加法器
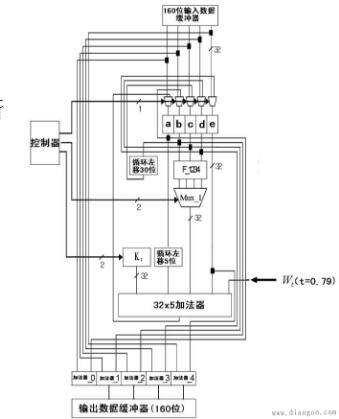
因為我們已經有了16位超前進位加法器,并且已經引出了進位產生信號Gx和進位傳遞信號Px,那么我們只需要兩個16位的超前進位加法器即可組成32位的加法器,但是超前部件CLA是4位的,意味著我們只需要用到CLA的低兩位,所以整個32位的超前進位加法器模塊圖如下所示:

圖6:32位超前進位加法器
至此,32位超前進位加法器完成。
回顧:此次32位超前進位加法器的設計以4位超前進位加法器和4位CLA部件為基礎,采用組內和組間都是超前進位的方式,有效的減小了傳統加法器串行進位導致的延遲問題,采用這種方法,只要設計合適位數的CLA部件,就可以設計任意位數的超前進位加法器,需要注意的地方就是進位產生信號和進位傳遞信號的理解,以及CLA部件的理解,下面附上此次設計的源碼以及仿真波形圖:
1位加法器:

4位CLA部件:

4位超前進位加法器:


4位超前進位加法器RTL視圖:
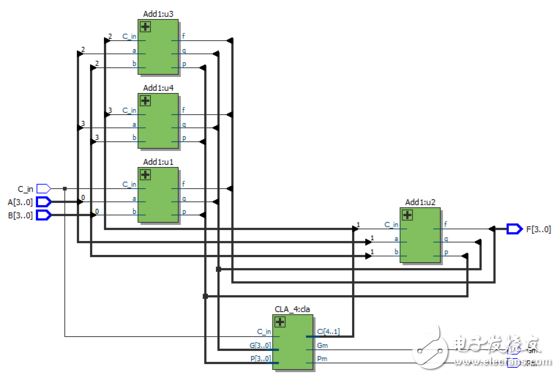
16位超前進位加法器:


16位超前進位加法器RTL視圖:

32位超前進位加法器:

32位超前進位加法器RTL視圖:

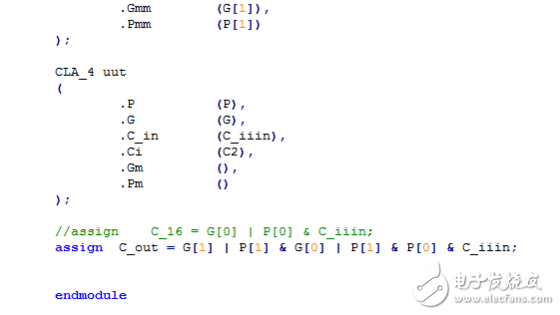
但是,我們發現如果在32位超前進位加法器中調用整個4位CLA,而我們僅僅只使用了兩位,導致了資源的浪費,所以,我們修改代碼如下:
*32位超前進位加法器:


*32位超前進位加法器RTL視圖:

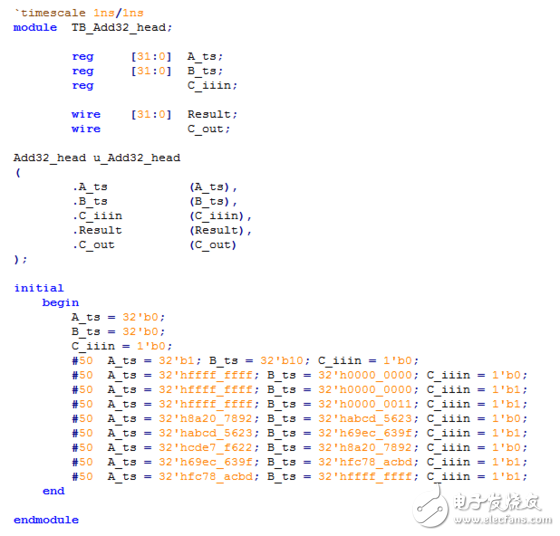
*32位超前進位加法器仿真激勵:
*32位超前進位加法器仿真波形圖:

從波形圖上可以看出,32位超前進位加法器功能正確,只要理解了設計的目的,以及設計的思想,實現這個加法器并不困難,所以理解很重要,希望能給正在學習計算機原理與組成的朋友幫上忙,謝謝!
如有不足的地方,還請指正!


















 工商網監
工商網監
評論