MCS-51單片機組成CAN通信系統(tǒng)需要擴展CAN控制器,本系統(tǒng)采用的CAN控制器是SJA1000。SJA1000是PHILIPS公司生產(chǎn)的既支持CAN 2.0B,又支持CAN 2.0A的CAN
2019-01-09 08:23:00 5734
5734 
在ISO 11898-2和ISO 11898-3中分別規(guī)定了兩種CAN總線結(jié)構(gòu)(在BOSCH CAN2.0規(guī)范中,并沒有關(guān)于總線拓撲結(jié)構(gòu)的說明):高速CAN總線和低速CAN總線,區(qū)別表如下所示。
2023-04-07 09:30:181836 
需要正確安裝和連接EtherCAT總線適配器和伺服驅(qū)動器。適配器負責將你的控制系統(tǒng)連接到EtherCAT總線網(wǎng)絡(luò),而伺服驅(qū)動器是用于控制伺服電機的設(shè)備。
2024-01-24 18:12:161366 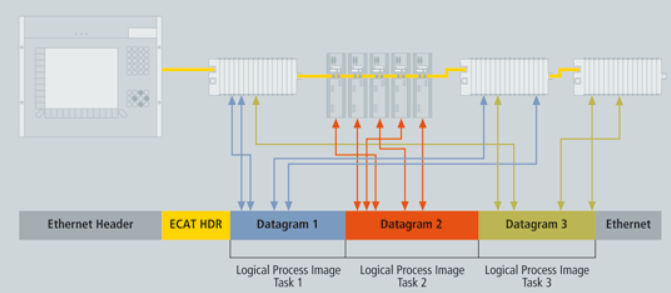
這意味著變送器通過CAN收發(fā)器改變總線電平,并將其信息傳輸?shù)?b class="flag-6" style="color: red">CAN總線。接收器通過監(jiān)測總線電平將總線上的信息讀取到自己的CAN收發(fā)器中。
2024-02-19 14:53:54606 
日本電產(chǎn)伺服株式會社正式推出搭載有Can-Bus通信功能的無刷直流電機。該電機主要用于自動售貨機的推貨機構(gòu)。
2022-03-30 14:53:463409 
參照 ISO/OSI 標準模型,CAN 總線的通信參考模型如圖 9-1 所示。這 4 層結(jié)構(gòu)的功能如下:? 物理層規(guī)定了節(jié)點的全部電氣特性,在一個網(wǎng)絡(luò)里,要實現(xiàn)不同節(jié)點間的數(shù)據(jù)傳輸,所有節(jié)點的物理層
2018-12-14 14:17:02
CAN總線具有哪些特性參數(shù)應(yīng)用?
2021-10-11 06:31:17
IICSPICAN485USB工業(yè)以太網(wǎng)EtherCATEtherCAT傳輸性能EtherCAT應(yīng)用層協(xié)議層CoE協(xié)議現(xiàn)場總線最近的實驗需要較高的運動控制速率。市場上大部分的驅(qū)動板目前只支持CAN通信。畢竟CAN通信配置簡單
2021-08-06 07:44:19
CAN總線步進伺服一體機閉環(huán)步進電機具有哪些特點及優(yōu)點?
2021-10-12 08:37:07
用于步進伺服的即插即用智能步進電機系統(tǒng)CAN總線步進伺服一體機閉環(huán)步進電機Trinamic的PD-1378 PANdrive智能步進電機系統(tǒng)結(jié)合了強大的步進電機和閉環(huán)驅(qū)控操作,具有更高的精度、可靠性
2021-06-28 10:00:00
產(chǎn)品的開發(fā),CAN總線的穩(wěn)定性是毋庸置疑的。CAN總線物理結(jié)構(gòu)與特性CAN總線網(wǎng)絡(luò)CAN總線網(wǎng)絡(luò)主要掛在CAN_H和CAN_L,各個節(jié)點...
2021-07-27 07:40:12
實用等優(yōu)點得到了越來越多的應(yīng)用,所以充電機內(nèi)部模塊間通信采用基于can總線的軟件均流方案;電動汽車充電機需要和蓄電池管理系統(tǒng)(bms)之間通信,同時由于can總線還具有較高的網(wǎng)絡(luò)安全性等特點,并且作為
2020-06-18 07:00:00
倍速鏈輸送具有哪些優(yōu)點?伺服電機和步進電機的控制方式有何區(qū)別?伺服電機和步進電機的過載特性有何區(qū)別?
2021-10-11 06:31:15
伺服電機的應(yīng)用領(lǐng)域有哪些?伺服電機有哪些控制模式?
2021-09-27 06:21:31
ModBus-RTU通信協(xié)議如何控制伺服電機?
2021-09-29 08:37:27
伺服電機的控制信號怎么設(shè)定?比如除了控制速度所需的模擬電壓外還有伺服使能等參數(shù),怎樣把這些參數(shù)在數(shù)據(jù)段設(shè)定?這些參數(shù)有固定規(guī)則嗎?
2013-04-22 20:52:18
現(xiàn)在伺服電機很多都支持Ethercat總線了,這個總線速度很牛。有玩過labview通過Ethercat控制伺服電機的大神請指教:
2018-10-16 19:15:53
以下鏈接:https://www.ncnynl.com/archives/201703/1414.html現(xiàn)在我們選擇用伺服驅(qū)動器與一個stm32進行can通信,從而實現(xiàn)對電機的控制,目前我們實現(xiàn)的是...
2021-06-28 06:58:40
stm32是怎樣與伺服驅(qū)動器進行can通信的?如何去實現(xiàn)對電機的控制?
2021-10-08 06:33:09
)方案,CAN-FD繼承了傳統(tǒng)CAN總線的主要特性,使用改動較小的物理層,雙線串行通信協(xié)議,依然基于非破壞性仲裁技術(shù),分布式實時控制,可靠的錯誤處理和檢測機制,在此基礎(chǔ)上對帶寬和數(shù)據(jù)長度進行優(yōu)化,將逐步
2023-02-14 14:22:23
國際標準化組織認可,技術(shù)比較成熟,控制的芯片已經(jīng)商品化,性價比高,特別適用于分布式測控系統(tǒng)之間的數(shù)通訊。CAN 總線插卡可以任意插在 PC AT XT 兼容機上,方便地構(gòu)成分布式監(jiān)控系統(tǒng)。因此,用 FPGA 實現(xiàn) CAN 總線通信控制器具有非常重要的應(yīng)用價值。
2018-12-13 14:26:31
什么是CAN總線?CAN總線是如何發(fā)展的?CAN總線是如何工作的?CAN有哪些特性?Philips制造的CAN芯片有哪些?什么是標準格式CAN和擴展格式CAN?
2021-05-20 06:16:35
因為公司項目需要,一直使用CAN總線控制整車電機,目前發(fā)現(xiàn)的問題:使用單片機總線數(shù)據(jù)CAN丟包。問題描述:使用STM32單片機的時候,發(fā)送CAN報文,經(jīng)常會出現(xiàn)丟包的情況,而且現(xiàn)象非常明顯。而使
2021-08-19 08:19:22
的設(shè)計,與一般通信總線相比,CAN總線的數(shù)據(jù)通信具有突出的可靠性、實時性和靈活性。因此,開發(fā)基于CAN總線的電動伺服閥智能控制網(wǎng)絡(luò)系統(tǒng),可以適應(yīng)現(xiàn)代化工業(yè)閥門控制需要,為簡化控制系統(tǒng)結(jié)構(gòu)、節(jié)約硬件投資和減少維護費用創(chuàng)造條件。
2011-03-09 16:03:22
基于FPGA的CAN總線通信系統(tǒng)為了克服單片機固有的缺陷, 滿足航天控制的需求, 文章提出了如何利用FPGA采用查詢的方式控制CAN控制器SJA1000,從而實現(xiàn)CAN總線數(shù)據(jù)通信的方法; 介紹了
2012-08-11 11:55:19
說明:這是我的畢業(yè)設(shè)計,基于STM32的CAN總線通信節(jié)點設(shè)計。用的是STM32F103微控制器,LCD1602液晶顯示,MQ-4甲烷氣體傳感器,CTM1050CAN收發(fā)器。但是甲烷傳感器限于條件
2021-07-19 07:18:56
查詢的時間必須足夠快,以避免報文丟失。4 結(jié)束語本設(shè)計很好地解決了導(dǎo)彈伺服機構(gòu)與CAN總線的連接和通信問題,大大減輕了原系統(tǒng)的重量,增強了信號傳遞的抗干擾性,提高了伺服機構(gòu)的控制精度,另外,PC/104的模塊化結(jié)構(gòu)使得接口的通用性和可維修性也顯著提高。
2019-06-11 05:00:04
步進電機和伺服電機控制的方式有何不同?步進電機和伺服電機的低頻特性有何不同?
2021-09-28 07:55:48
針對系統(tǒng)通信可靠、實時性的要求,在交直流埋弧焊接通信控制中,提出了一種基于DSP的CAN總線通信控制方案,介紹了交直流埋弧焊電源系統(tǒng)結(jié)構(gòu)原理的設(shè)計,并對基于DSP的CAN總線通信的協(xié)議設(shè)計、硬件電路設(shè)計以及軟件設(shè)計進行了較詳細說明,同時還提出了一種多幀數(shù)據(jù)準確通信的方案。
2021-05-28 06:31:48
步進電機和伺服電機的控制精度有何區(qū)別?步進電機和伺服電機的低頻特性有何區(qū)別?
2021-09-30 08:23:52
作者:Xiaomin 概述 CAN(Controller Area Network)總線協(xié)議是由 BOSCH 發(fā)明的一種基于消息廣播模式的串行通信總線,它起初用于實現(xiàn)汽車內(nèi)ECU之間可靠的通信,后
2019-07-26 08:33:27
請問EtherCAT總線伺服電機/一體化伺服電機如何清除歷史報警?
2021-09-30 06:01:38
EtherCAT總線伺服電機/一體化伺服電機如何清零當前位置?
2021-09-27 07:37:37
EtherCAT總線伺服電機/一體化伺服電機如何恢復(fù)為出廠參數(shù)?
2021-06-28 06:13:21
DSA和CAN總線的步進電機控制系統(tǒng):步進電機可直接接收脈沖信號的控制,適用于數(shù)字控制系統(tǒng)。
2009-04-02 11:12:45 28
28 介紹CAN 總線及其通信協(xié)議J1939, 并設(shè)計基于CAN 總線的多ECU 通信平臺的硬件結(jié)構(gòu); 闡述節(jié)點ECU 通信的軟件設(shè)計方法,在仿真試驗的條件下實現(xiàn)數(shù)據(jù)通信的功能。試驗表明該平臺運行
2009-04-15 09:49:5322 介紹CAN 總線及其通信協(xié)議J1939, 并設(shè)計基于CAN 總線的多ECU 通信平臺的硬件結(jié)構(gòu); 闡述節(jié)點ECU 通信的軟件設(shè)計方法,在仿真試驗的條件下實現(xiàn)數(shù)據(jù)通信的功能。試驗表明該平臺運行
2009-05-16 14:19:0828 介紹了基于CAN 總線的分布式潛水電機監(jiān)控系統(tǒng),分析了系統(tǒng)的構(gòu)成及實現(xiàn)方法,簡述了控制節(jié)點、CAN/RS232 接口的通信流程。
The distributed submersible motor monitor system based on C
2009-05-25 11:39:1819 本文主要介紹了基于多DSP 的CAN 總線通信電機控制系統(tǒng)的設(shè)計,利用PC 機作為監(jiān)控主機,采用CAN 總線接口卡實現(xiàn)CAN 協(xié)議的物理層和數(shù)據(jù)鏈路層,最終實現(xiàn)對各節(jié)點電機的監(jiān)控和管理
2009-05-30 14:56:4027 根據(jù)印刷機械的工藝特點,針對傳統(tǒng)以機械長軸為動力源的印刷機同步系統(tǒng),設(shè)計了基于CAN現(xiàn)場總線的多伺服電機同步控制系統(tǒng)方案,提出了上位機同步運動數(shù)據(jù)的產(chǎn)生機制,和上
2009-06-01 15:40:0939 分析了傳統(tǒng)的串行通信和集中式控制的缺點,提出將CAN 總線技術(shù)應(yīng)用于分布式三維步進電機控制系統(tǒng),給出了分布式控制網(wǎng)絡(luò)的拓撲結(jié)構(gòu)和網(wǎng)絡(luò)物理層、數(shù)據(jù)鏈路層的實現(xiàn)方法,
2009-06-06 13:43:1223 本文針對賓館、酒店的客房控制和管理系統(tǒng),介紹了基于CAN 總線的客房通信控制器的硬件電路結(jié)構(gòu)、原理及軟件結(jié)構(gòu)和主程序流程。關(guān)鍵詞:CAN 總線;現(xiàn)場總線;通信技術(shù);樓
2009-06-13 12:06:0313 鑒于目前基于RS-485通信的監(jiān)控系統(tǒng)的一些問題,本文闡述了用微控制器P87C591和現(xiàn)場總線技術(shù)實現(xiàn)基于CAN總線的監(jiān)控系統(tǒng),還詳細說明了RS-232與CAN總線轉(zhuǎn)換器和基于CAN總線的云臺控制
2009-07-09 10:06:4736 本設(shè)計為光電穩(wěn)定跟蹤平臺開發(fā)CAN 驅(qū)動,以實現(xiàn)CAN 總線上設(shè)備間的通信。分析了linux 下標準設(shè)備驅(qū)動機制和CAN 總線通信模型,給出了光電穩(wěn)定跟蹤平臺中CAN 總線通信的硬件設(shè)計
2009-08-04 08:33:4830 針對軌道車輛分布式控制系統(tǒng)中驅(qū)動電機多而分散、系統(tǒng)信息量大、布線復(fù)雜、調(diào)試不方便等特點,設(shè)計了一種基于CAN 總線技術(shù)的多電機分布式控制系統(tǒng)。通過CAN 總線,監(jiān)控主
2009-09-12 15:38:1030 本文介紹了基于TMS320F2812 三軸跟蹤轉(zhuǎn)臺伺服控制系統(tǒng)的設(shè)計與實現(xiàn)。采用“交流伺服電機+減速器”代替轉(zhuǎn)臺傳統(tǒng)的直流力矩電機直接驅(qū)動負載的方式;運用DSP 和CAN 總線技術(shù);利用
2009-09-26 08:18:0616 總線化是工業(yè)控制系統(tǒng)的一個發(fā)展方向,基于CAN(Controller Area Network)總線的伺服系統(tǒng)在適用范圍、可擴展性、可維護性以及抗故障能力等方面有明顯的優(yōu)越性。本文給出了伺服控制
2009-12-14 13:11:1735 GY8608 CAN 總線接口的雙路步進電機控制器:1、CAN 總線接口,可通過同時控制2 路步進電機。2、如果只控制一路步進電機,最大工作頻率25khz。3、如果同時控制兩路步進電機,則
2010-01-14 18:40:1434 摘要:介紹CAN總線及其通信協(xié)議J1939,并設(shè)計基于CAN總線的多ECN通信平臺的硬件結(jié)構(gòu);闡述節(jié)點ECN通信的軟件設(shè)計方法,在仿真試驗的條件下實現(xiàn)數(shù)
2006-03-11 13:21:031634 
CAN總線通信電路
2008-10-14 13:59:176323 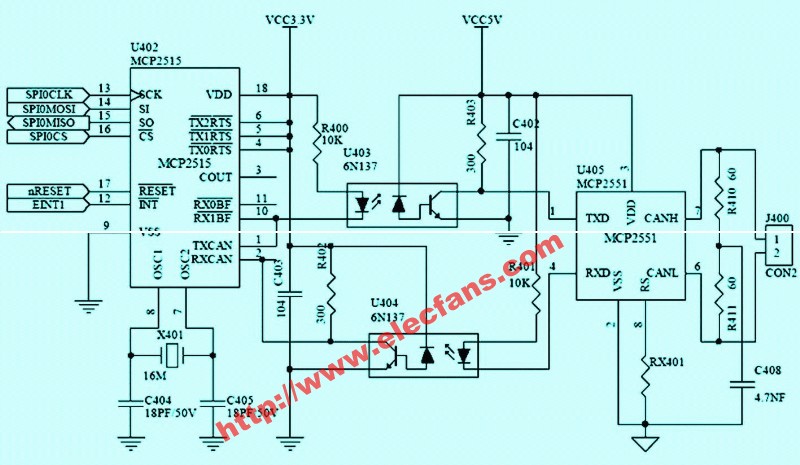
CAN總線通信硬件原理圖(采用TJA1050T CAN總線驅(qū)動器)
F040中內(nèi)置CAN總線協(xié)議控制器,只要外接總線驅(qū)動芯片和適當?shù)目垢蓴_電路就可以很方便地建立一
2009-11-13 12:18:1432972 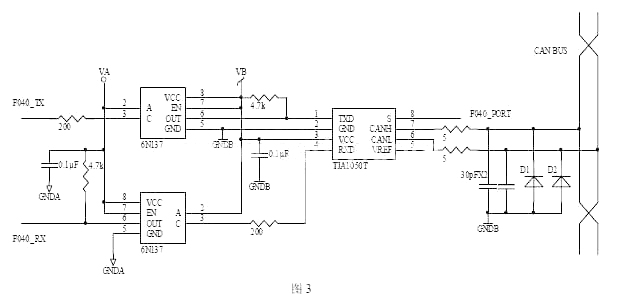
基于CAN總線的懸浮控制器監(jiān)控終端的設(shè)計
CAN總線是德國Bosch公司為解決現(xiàn)代汽車中多傳感器和控制器之間的數(shù)據(jù)交換而開發(fā)的一種串行總線。由于它通信速率高、通信
2010-01-25 16:25:04608 
CAN總線與RS-485總線的通信接口設(shè)計
1 CAN總線及RS-485總線簡介 CAN總線(Controller Area Network)是由德國Bosch公司于20世紀80年代專門為汽車電子控制系統(tǒng)
2010-01-27 10:46:074197 
本文首先介紹PCI總線控制器PCI9052與CAN總線通信控制器SJA1000的工作原理,并且介紹了PCI總線和CAN總線通信控制器接口的硬件和軟件實現(xiàn)方法。
2011-09-23 17:34:221938 
設(shè)計了多個CAN總線的通信節(jié)點,通過PCI9810-CAN適配卡上的CAN總線,組成一個局域通信網(wǎng)絡(luò),實現(xiàn)了PC機對各個節(jié)點的監(jiān)控和通信以及節(jié)點間的自由通信。
2011-10-19 14:57:5667 基于對CAN 總線控制器的功能分析, 并應(yīng)用Verilog語言進行軟件設(shè)計, 從而實現(xiàn)CAN節(jié)點之間的通信功能。
2012-04-28 09:56:5413818 
基于CAN總線系統(tǒng)結(jié)構(gòu)構(gòu)成,通過工程實踐的具體應(yīng)用以及對CAN控制器及收發(fā)器硬件結(jié)構(gòu)的深入理解,并從通信的角度出發(fā)著重深入分析了CAN總線通信的節(jié)點同步機制、總線地址機制、總
2012-05-08 15:23:04404 本文介紹使用MODBUS現(xiàn)場總線與伺服控制技術(shù)統(tǒng)一,實現(xiàn)設(shè)備遠程監(jiān)控、電機運動控制配置與實現(xiàn)方案的方法。
2012-12-10 11:26:5210718 
CAN總線通信詳解。
2016-03-30 16:46:100 基于CAN總線伺服系統(tǒng)的多電機同步控制算法的研究,有興趣的同學可以下載學習
2016-04-26 17:53:460 基于FPGA的CAN總線通信系統(tǒng),下來看看。
2016-05-10 11:47:1334 基于雙CAN總線的數(shù)字伺服通信協(xié)議
2017-09-01 14:25:428 一種由LIN總線通信控制的伺服電機,涉及到汽車空調(diào)伺服電機領(lǐng)域,主要用于汽車空調(diào)風門的驅(qū)動調(diào)節(jié)上,其結(jié)構(gòu)包括:上下機殼、齒輪系、馬達、電路板,芯片,插針座。該伺服電機最顯著的優(yōu)點在于減少了汽車空調(diào)
2017-10-13 15:58:4140 字電機伺服驅(qū)動系統(tǒng),使用CANopen通訊協(xié)議實現(xiàn)了CAN總線數(shù)字信號處理器(DSP)系統(tǒng)與上位機CAN卡之間的通訊,并通過測試實驗驗證了信息傳遞的可靠性,保證了全數(shù)字網(wǎng)絡(luò)化伺服驅(qū)動系統(tǒng)中對電機控制的快速性、準確性和實時性。 2 通訊系統(tǒng)實現(xiàn)的基本原理 2.1 LF240x系
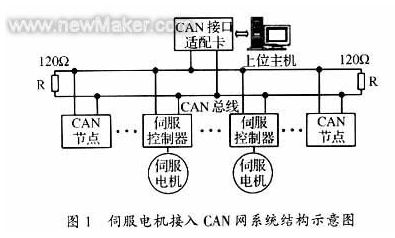
2017-10-31 11:00:5816 基于CAN總線技術(shù)的多電機伺服控制系統(tǒng)網(wǎng)絡(luò)結(jié)構(gòu)如圖1所示,系統(tǒng)由上位機、CAN總線、現(xiàn)場伺服單元節(jié)點組成。數(shù)控系統(tǒng)上位機通過CAN總線控制網(wǎng)絡(luò)節(jié)點任一伺服單元,數(shù)字伺服與數(shù)控系統(tǒng)之間數(shù)據(jù)傳輸可分為
2020-03-19 08:05:001860 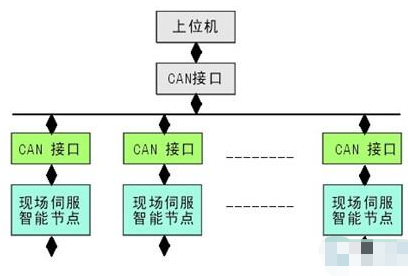
由于CAN總線相比其它現(xiàn)場總線技術(shù)具有眾多優(yōu)點,因此在工業(yè)中的應(yīng)用越來越廣泛。本文基于該總線技術(shù)針對熱網(wǎng)監(jiān)控系統(tǒng)開發(fā)的現(xiàn)場控制和通信的子系統(tǒng),能安全可靠地實現(xiàn)現(xiàn)場數(shù)據(jù)采集、閉環(huán)控制及數(shù)據(jù)傳輸。鑒于篇幅,本文重點介紹CAN網(wǎng)絡(luò)通信部分的設(shè)計與實現(xiàn)。
2020-06-05 07:51:001849 
在理解了CAN總線的自通信程序后,再來探討CAN總線間的相互通信變得容易了許多。對于是自通信還是相互通信,這個肯定是需要對寄存器進行必要的設(shè)置 的,分析PIAE的兩個程序后不難發(fā)現(xiàn),自通信和互通信
2018-09-21 15:06:021466 本文主要闡述了直流伺服電機機械特性及它的控制方式。
2020-01-09 14:13:1415272 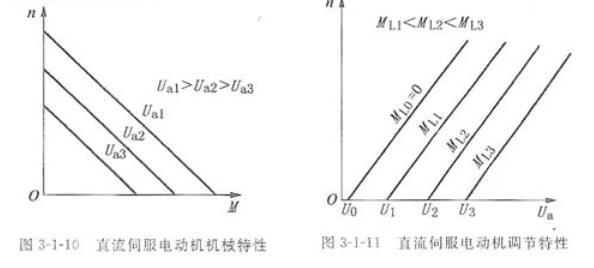
硬件電路的設(shè)計主要是CAN通信控制器與微處理器之間和CAN總線收發(fā)器與物理總線之間的接口電路的設(shè)計。CAN通信控制器是CAN總線接口電路的核心,主要完成CAN的通信協(xié)議,而CAN總線收發(fā)器的主要功能是增大通信距離,提高系統(tǒng)的瞬間抗干擾能力,保護總線,降低射頻干擾(RFI),實現(xiàn)熱防護等。
2020-03-13 10:45:506646 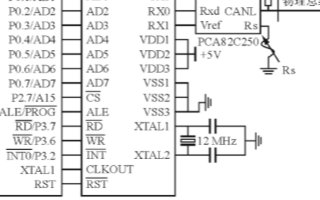
CAN總線是一種有效支持分布式控制系統(tǒng)或?qū)崟r控制的串行通信網(wǎng)絡(luò),是一個多主總線,總線上的各個節(jié)點都有權(quán)隨時向其他節(jié)點發(fā)送信息,總線沖突時通過總線仲裁機制來決定占用總線的節(jié)點。CAN能夠使用多種物理
2020-04-12 10:49:00944 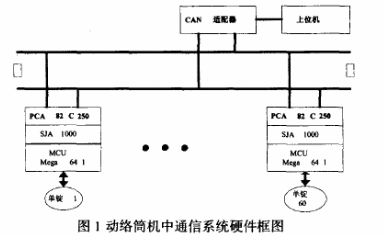
伺服的結(jié)構(gòu)是怎樣的?一個最簡易的伺服控制單元,就是一個伺服電機加伺服控制器,今天就來解析下伺服電機與伺服控制器。
2020-09-24 10:54:3412381 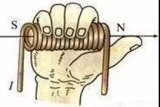
文章介紹了CAN總線通信協(xié)議和Motorola新一代嵌入式控制器DSP56F805內(nèi)置的用于實現(xiàn)CAN通信的MSCAN模塊,并通過編程實例說明了MSCAN模塊的應(yīng)用方法,最后介紹了研華公司生產(chǎn)的CAN總線通信卡PCL841的使用方法。
2021-03-15 16:24:2714 CAN總線通信協(xié)議詳細如下。
2021-04-19 16:54:3875 CAN總線協(xié)議及CAN在工業(yè)控制中的應(yīng)用說明。
2021-04-20 11:14:0127 說明:這是我的畢業(yè)設(shè)計,基于STM32的CAN總線通信節(jié)點設(shè)計。用的是STM32F103微控制器,LCD1602液晶顯示,MQ-4甲烷氣體傳感器,CTM1050CAN收發(fā)器。但是甲烷傳感器限于條件
2021-12-24 19:30:1046 ),是一種用于實時應(yīng)用的串行通訊協(xié)議總線,它可以使用雙絞線來傳輸信號,是世界上應(yīng)用最廣泛的現(xiàn)場總線之一。CAN協(xié)議用于汽車中各種不同元件之間的通信,用來取代昂貴而笨重的配電線束。CAN協(xié)議的使用廣泛這一特點使其很快延伸到自動化控制以及工業(yè)領(lǐng)域中。 CAN協(xié)議的特性包括完
2022-01-15 17:04:485782 CAN 總線插卡可以任意插在 PC AT XT 兼容機上,方便地構(gòu)成分布式監(jiān)控系統(tǒng)。因此,用 FPGA 實現(xiàn) CAN 總線通信控制器具有非常重要的應(yīng)用價值。本篇將通過一個實例講解利用 FPGA 實現(xiàn) CAN 總線通信控制器的實現(xiàn)方法。
2022-07-29 09:43:222176 【導(dǎo)讀】介紹了CAN總線與伺服電機的特點,并討論了伺服電機基于CAN總線的通信控制特性。
2022-12-27 10:57:565482 本文對CAN總線的研究主要集中在如何將CAN總線運用在充電機OBC上面,并完成充電機在工作過程中與電池管理系統(tǒng)(BMS)、內(nèi)部電源模塊以及監(jiān)控系統(tǒng)的通信流程。
2023-02-24 13:34:242028 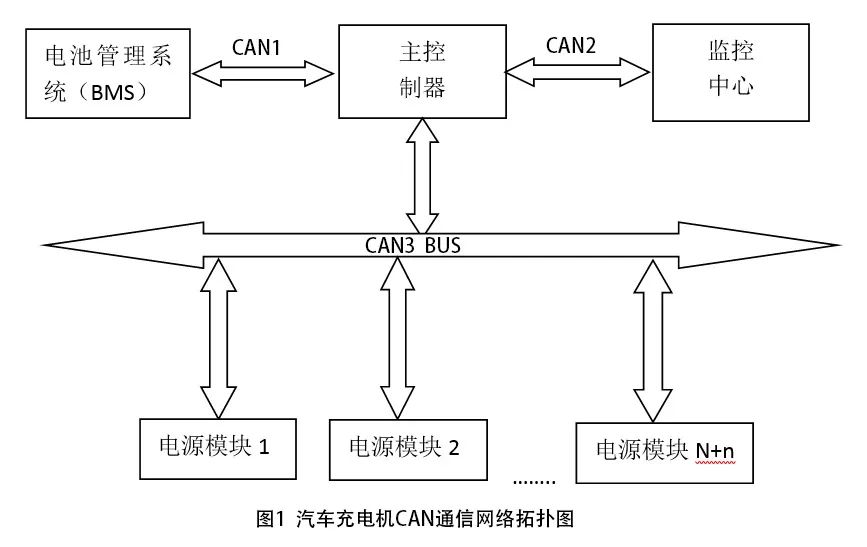
總線伺服是什么設(shè)備?它是指那些可以通過現(xiàn)場總線進行控制的伺服電機。 目前,常見的伺服控制系統(tǒng)有兩種,分別是脈沖控制和總線控制。什么是脈沖控制呢?就是PLC通過脈沖輸出IO一個一個的將脈沖信號發(fā)送給
2023-03-28 10:55:021628 即從CAN控制芯片輸出邏輯電平到CAN收發(fā)器,然后經(jīng)過CAN收發(fā)器內(nèi)部轉(zhuǎn)換將邏輯電平轉(zhuǎn)換為差分信號輸出到CAN總線上,CAN總線上的節(jié)點都可以決定自己是否需要總線上的數(shù)據(jù)。
2023-03-29 10:06:167598 在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的伺服控制,其實就是對伺服電機的位置控制。 其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-04-27 17:34:351115 
今天給大俠帶來基于FPGA的CAN總線控制器的設(shè)計,由于篇幅較長,分三篇。今天帶來第一篇,上篇,CAN 總線協(xié)議解析以及 CAN 通信控制器程序基本框架。話不多說,上貨。
2023-05-18 09:21:30868 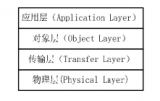
點擊上方 藍字 關(guān)注我們 摘要:以FPGA 代替?zhèn)鹘y(tǒng)的單片機和外圍擴展芯片, 給出了CAN 總線通信節(jié)點的詳細設(shè)計方案。其中以SJA1000為CAN 總線控制器、FPGA 為主控制器, 設(shè)計實現(xiàn)通信
2023-06-18 11:15:011796 日本電產(chǎn)伺服株式會社正式推出搭載有Can-Bus通信功能的無刷直流電機。該電機主要用于自動售貨機的推貨機構(gòu)。
2022-08-25 14:37:46480 
在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的控制伺服,其實就是對伺服電機的位置控制。其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-08-09 09:25:28601 CAN總線(Controller Area Network)是一種廣泛應(yīng)用于汽車、工業(yè)自動化和其他領(lǐng)域的串行通信協(xié)議。以下是幾種常見的CAN總線通信協(xié)議。
2023-08-18 14:40:128848 
在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的控制伺服,其實就是對伺服電機的位置控制。其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-09-08 11:22:48736 通過總線控制伺服電機時,如何進行回零(尋參考點)控制?這里就CANOPEN伺服電機的回零控制方法分享給大家。
2023-10-23 11:42:201628 
CAN總線舵機的特性、控制方法以及常見故障
2023-10-21 09:53:050 要準確地定義伺服電機,我們首先需理解其核心特性:反饋與閉環(huán)控制。伺服電機憑借這些特性,能精確控制扭矩、速度或位置,即使在零速度下,也能保持足夠的扭矩以鎖定負載。
2023-11-10 10:46:39247 
伺服電機和步進電機在控制精度、低頻特性、矩頻特性、過載能力、編碼器類型等方面存在顯著差異。
2024-01-16 10:27:42192 高速CAN總線和低速CAN總線的特性 高速CAN總線和低速CAN總線是兩種常見的CAN總線類型。它們在數(shù)據(jù)傳輸速率、最大電纜長度、適用場景等方面存在一些差異。下面將詳盡、詳實、細致地介紹這兩種CAN
2024-01-31 14:09:01497 特性,可把所收到的電信號轉(zhuǎn)換成電動機軸上的角位移或角速度輸出。按控制方式可分為:脈沖型和總線型。 一、伺服電機脈沖方式 伺服電機脈沖方式是通過控制器向驅(qū)動器發(fā)送脈沖信號控制電機運動,由于每一次脈沖的頻率和寬度
2024-02-25 11:53:15525
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論