變壓器外部結(jié)構(gòu)示意圖
TQSB系列交直流高壓試驗(yàn)變壓器產(chǎn)品詳細(xì)說明:
TQSB系列輕型交直流高壓試驗(yàn)變壓器是根據(jù)機(jī)電部《試驗(yàn)變壓器》標(biāo)準(zhǔn)在原同類產(chǎn)品基礎(chǔ)
2009-12-15 10:20:09 7623
7623 本菜鳥剛學(xué)機(jī)器人控制,對于兩關(guān)節(jié)機(jī)器人,實(shí)現(xiàn)既定的末端軌跡,軌跡規(guī)劃已完成,但是程序的延時不準(zhǔn)確,導(dǎo)致最終軌跡混亂,求大神破?
2015-04-29 16:21:23
機(jī)器人關(guān)節(jié)是機(jī)器人各個零部件之間發(fā)生相對運(yùn)動的機(jī)構(gòu)。關(guān)節(jié)之中,單獨(dú)驅(qū)動的為主動關(guān)節(jié),反之稱為從動關(guān)節(jié)。機(jī)器人關(guān)節(jié)模組通常采用超聲波電機(jī)、伺服電機(jī)、諧波減速器、VR減速器、行星齒輪箱電機(jī)等。機(jī)器人關(guān)節(jié)
2021-05-27 11:26:11
`在論壇看到了那個波士頓動力公司的斑點(diǎn) 獵豹 大狗 野貓 這幾種軍用機(jī)器人,也看了那些個測試視頻,他們的那些關(guān)節(jié)結(jié)構(gòu)是怎樣設(shè)計(jì)的啊?是液壓還是機(jī)械?`
2015-03-09 11:41:04
第二章 機(jī)器人系統(tǒng)與控制需求簡介2.1 工業(yè)機(jī)器人的系統(tǒng)組成機(jī)械本體:精密減速機(jī)、伺服電機(jī)、伺服驅(qū)動器、控制系統(tǒng)(核心零部件)控制柜示教盒2.2 機(jī)器人本體結(jié)構(gòu)與傳動方式簡介四大家族:ABB
2021-09-08 07:44:15
LPC2103 誰有IO口結(jié)構(gòu)示意圖 是推挽 還是開漏?
2014-02-15 22:05:32
`linux內(nèi)核示意圖`
2013-04-14 23:21:25
工業(yè)機(jī)器人第一關(guān)節(jié)到第四關(guān)節(jié)全部使用RV減速機(jī),輕載工業(yè)機(jī)器人第五關(guān)節(jié)和第六關(guān)節(jié)有可能使用諧波減速機(jī)。重載工業(yè)機(jī)器人所有關(guān)節(jié)都需要使用RV減速機(jī)。平均而言,每臺工業(yè)機(jī)器人使用4.5臺RV減速器
2021-09-03 07:10:03
小型機(jī)器人,20cm左右的,現(xiàn)在有沒有球形關(guān)節(jié)元件?
2015-09-04 11:27:17
` 本帖最后由 大連云港 于 2015-1-19 11:02 編輯
工業(yè)機(jī)器人是面向工業(yè)領(lǐng)域的多關(guān)節(jié)機(jī)械手或多自由度的機(jī)器人。工業(yè)機(jī)器人是自動執(zhí)行工作的機(jī)器裝置,是靠自身動力和控制能力來實(shí)現(xiàn)
2015-01-19 10:58:38
《先進(jìn)機(jī)器人控制》從控制的角度系統(tǒng)地介紹了機(jī)器人學(xué)的基礎(chǔ)知識和當(dāng)前的發(fā)展?fàn)顩r。全書共分為12章,由基礎(chǔ)篇、控制結(jié)構(gòu)篇和先進(jìn)控制篇構(gòu)成。基礎(chǔ)篇著重介紹串聯(lián)關(guān)節(jié)機(jī)器人的運(yùn)動學(xué)、運(yùn)動規(guī)劃和動力學(xué)。其中
2017-09-19 15:30:57
與控制就要其轉(zhuǎn)換為MCU可以識別的數(shù)字信號。 3、伺服電機(jī)組 實(shí)現(xiàn)變結(jié)構(gòu)的動力來源于安裝在機(jī)器人四只關(guān)節(jié)處的四個伺服電機(jī)。它在“變結(jié)構(gòu)智能服務(wù)機(jī)器人” 的控制系統(tǒng)中
2013-10-31 13:05:45
機(jī)器人結(jié)構(gòu)本體能夠有效承受運(yùn)動沖擊、模擬四足動物運(yùn)動的先決條件;高性能驅(qū)動器為機(jī)器人運(yùn)動提供足夠動力,行走穩(wěn)定性控制負(fù)責(zé)協(xié)調(diào)多個關(guān)節(jié)驅(qū)動器,實(shí)現(xiàn)機(jī)器人穩(wěn)定行走;強(qiáng)化學(xué)習(xí)則在復(fù)雜環(huán)境感知決策、不確定模型
2021-09-15 06:54:01
的關(guān)節(jié)系統(tǒng)的硬件架構(gòu)。同時介紹了基于此硬件關(guān)節(jié)搭建的控制軟件系統(tǒng)。 雙足機(jī)器人相比于一般的移動機(jī)器人在非結(jié)構(gòu)化環(huán)境中具有更好的移動能力,因而受到研究者的廣泛關(guān)注。控制機(jī)器人獲得快速的行走速度以及實(shí)現(xiàn)跑動
2012-12-06 15:32:52
如何對采集機(jī)器人的關(guān)節(jié)位置及TCP位置進(jìn)行虛擬仿真?
2021-10-08 06:31:46
指令后,首先分析解釋指令,確定手的運(yùn)動參數(shù)。然后進(jìn)行運(yùn)動學(xué)、動力學(xué)和插補(bǔ)運(yùn)算,最后得出機(jī)器人各個關(guān)節(jié)的協(xié)調(diào)運(yùn)動參數(shù)。這些參數(shù)經(jīng)過通信線路輸出到伺服控制級,作為各個關(guān)節(jié)伺服控制系統(tǒng)的給定信號。關(guān)節(jié)驅(qū)動器
2018-10-12 10:16:22
工業(yè)機(jī)器人一般由主構(gòu)架(手臂)、手腕、驅(qū)動系統(tǒng)、測量系統(tǒng)、控制器及傳感器等組成。 1圖是工業(yè)機(jī)器人的典型結(jié)構(gòu)。機(jī)器人手臂具有3個自由度(運(yùn)動坐標(biāo)軸),機(jī)器人作業(yè)空間由手臂運(yùn)動范圍決定。手腕是機(jī)器人
2015-01-19 10:36:12
)機(jī)器人的系統(tǒng)結(jié)構(gòu)一臺通用的工業(yè)機(jī)器人,按其功能劃分,一般由3個相互關(guān)連的部分組成:機(jī)械手總成、控制器、示教系統(tǒng),如圖所示。機(jī)械手總成是機(jī)器人的執(zhí)行機(jī)構(gòu),它由驅(qū)動器、傳動機(jī)構(gòu)、機(jī)器人臂、關(guān)節(jié)、末端操作器
2017-12-15 10:25:19
時間的積累。本文以KUKA為例,分協(xié)作機(jī)器人iiwa和傳統(tǒng)機(jī)器人KR兩個大系列。協(xié)作機(jī)器人iiwa 當(dāng)前主流的協(xié)作機(jī)器人都采用“模塊化”思想的關(guān)節(jié)設(shè)計(jì),采用直驅(qū)電機(jī)+諧波減速器的方式,每個關(guān)節(jié)的內(nèi)部結(jié)構(gòu)
2018-11-01 11:08:12
的動力系統(tǒng)有哪些優(yōu)勢?<span]超聲電機(jī)一般安裝在機(jī)器人的關(guān)節(jié)處,機(jī)器人的關(guān)節(jié)驅(qū)動離不開伺服系統(tǒng),機(jī)器人關(guān)節(jié)越多,柔性和精準(zhǔn)度就越高,所需要的超聲電機(jī)數(shù)量就越多。微型機(jī)器人對關(guān)節(jié)驅(qū)動
2020-11-02 11:21:13
示意圖圖解:來自康奈爾大學(xué)和賓夕法尼亞大學(xué)的研究人員構(gòu)建了一個微型機(jī)器人,該微型機(jī)器人由一個簡單的硅光電電路所組成,從本質(zhì)上來說,主要是軀干和大腦,以及四個電化學(xué)執(zhí)行器用來執(zhí)行腿的功能。當(dāng)激光照射到硅光路的...
2021-09-10 07:35:09
狀態(tài)方程2 控制器設(shè)計(jì):(pure pursuit)純軌跡算法3程序源碼(Matlab)3.1 分為幾個步驟3.2 代碼3.3 效果1 差速機(jī)器人運(yùn)動模型1.1 運(yùn)動學(xué)分析建模運(yùn)動特性為兩輪差速驅(qū)動,其底部
2021-09-01 08:11:00
的6軸關(guān)節(jié)式操作機(jī),它由驅(qū)動器、傳動機(jī)構(gòu)、機(jī)械手臂、關(guān)節(jié)以及內(nèi)部傳感器等組成。2、機(jī)器人控制柜:它是機(jī)器人系統(tǒng)的神經(jīng)中樞,包括計(jì)算機(jī)硬件、軟件和一些專用電路,負(fù)責(zé)處理機(jī)器人工作過程中的全部信息和控制其
2020-11-16 16:18:45
電機(jī)控制系統(tǒng)示意圖
2021-08-31 07:20:54
電腦鍵盤排列圖、功能圖、指法示意圖如下:計(jì)算機(jī)鍵盤字母示意圖
2009-03-10 10:58:32
請問Arduino常見芯片板卡引腳示意圖有哪些?
2022-01-24 07:13:23
超級DIY 電動車鋰電池及后備電源電池組合教程與示意圖-----超霸力科技提供大圓柱,螺絲頭 401553.2V 磷酸鐵鋰電池 組合示意圖有點(diǎn)像小朋友玩樂高一樣,享受快樂,享受DIY的欣喜收獲與成就。讓你愛車有動力,超霸力電池給你愛車提供給力的持久動力!
2012-10-19 07:32:49
摩托羅拉T2688/T2988/NEC988D天線開關(guān)連接示意圖諾基亞8210天線開關(guān)連接示意圖摩托羅拉T189天線開關(guān)連接示意圖摩托羅拉V66天線開關(guān)連接示意圖摩托羅拉V8088/V998天線開關(guān)連接
2008-07-13 02:41:13 378
378 三極管結(jié)構(gòu)示意圖
2009-11-12 14:56:0451 光電開關(guān)檢測示意圖
2009-12-16 15:09:4118 RJS-II系列關(guān)節(jié)模組是泰科智能推出的一款基于模塊化理念設(shè)計(jì)、輕巧、高精度的協(xié)作機(jī)器人關(guān)節(jié),一體化集成的RJS-II不僅結(jié)構(gòu)尺寸更小,性價比更高,為您解決機(jī)器人在更多復(fù)雜環(huán)境中的適應(yīng)性和穩(wěn)定性
2023-04-17 15:02:00
深圳泰科智能TB6-R5協(xié)作機(jī)器人是一款靈活的輕型工業(yè)協(xié)作機(jī)器人,具有精巧的機(jī)械結(jié)構(gòu)設(shè)計(jì)。這款協(xié)作機(jī)器人有效負(fù)載為5KG,自重僅為23KG,重復(fù)定位精度可達(dá)±0.05mm,適應(yīng)多樣性、柔性生產(chǎn)
2023-04-17 16:12:03
RJU系列關(guān)節(jié)模組——面向商業(yè)、生活服務(wù)類應(yīng)用 一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統(tǒng)外形的機(jī)器人關(guān)節(jié),而是一款能夠給機(jī)器人更多設(shè)計(jì)空間,和應(yīng)用領(lǐng)域的關(guān)節(jié),客戶
2023-04-17 16:25:29
RJU系列關(guān)節(jié)模組——面向商業(yè)、生活服務(wù)類應(yīng)用 一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統(tǒng)外形的機(jī)器人關(guān)節(jié),而是一款能夠給機(jī)器人更多設(shè)計(jì)空間,和應(yīng)用領(lǐng)域的關(guān)節(jié),客戶
2023-04-17 17:40:55
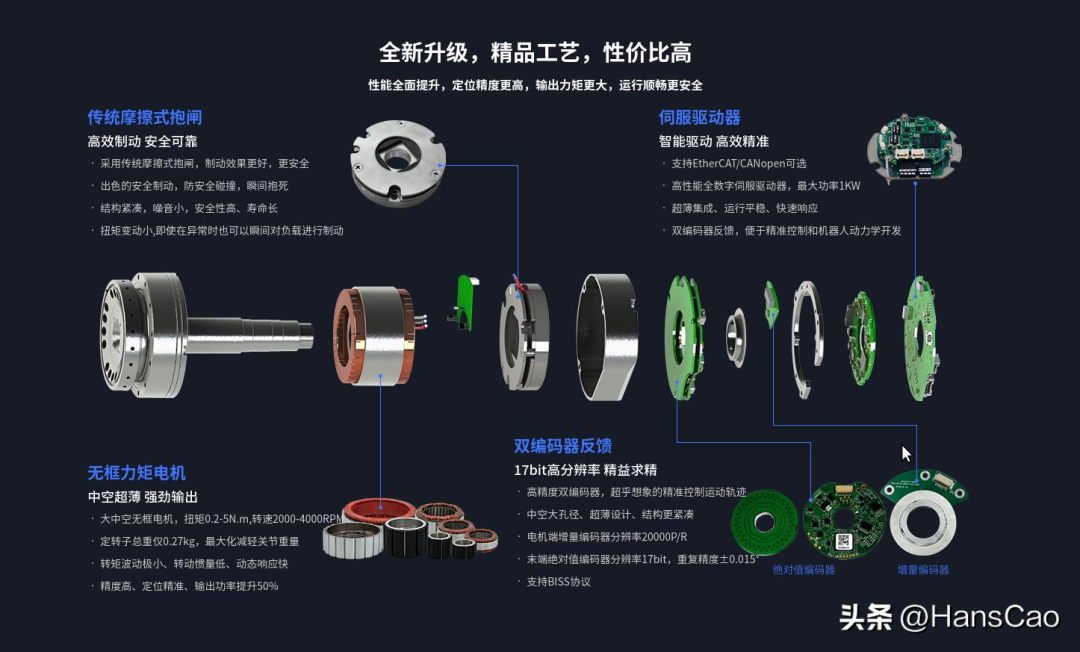
產(chǎn)品優(yōu)勢專注機(jī)器人關(guān)節(jié)研發(fā),RJS系列關(guān)節(jié)模組具有定位精度高、性能可靠等特點(diǎn)。 模塊化設(shè)計(jì)RJS關(guān)節(jié)模組集成無框電機(jī)、驅(qū)動器、諧波減速器、編碼器、制動器于一體,結(jié)構(gòu)小巧緊湊,6軸RJS關(guān)節(jié)
2023-04-18 14:04:34
機(jī)器人關(guān)節(jié)電機(jī)是專業(yè)為機(jī)器人關(guān)節(jié)設(shè)計(jì)研發(fā)生產(chǎn)。電機(jī)既有中空大孔徑,能保證關(guān)節(jié)模組完美融合的組合, 電機(jī)的定轉(zhuǎn)子機(jī)構(gòu)緊湊,轉(zhuǎn)子采用了高性能稀土永磁材料,此系列電機(jī)轉(zhuǎn)矩脈動極低,易于速度控制和精確
2023-04-18 17:35:19
RJU系列關(guān)節(jié)模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統(tǒng)外形的機(jī)器人關(guān)節(jié),而是一款能夠給機(jī)器人更多設(shè)計(jì)空間,和應(yīng)用領(lǐng)域的關(guān)節(jié),客戶可根據(jù)自身產(chǎn)品方向,自由定位
2023-04-19 10:48:11
RJU系列關(guān)節(jié)模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統(tǒng)外形的機(jī)器人關(guān)節(jié),而是一款能夠給機(jī)器人更多設(shè)計(jì)空間,和應(yīng)用領(lǐng)域的關(guān)節(jié),客戶可根據(jù)自身產(chǎn)品方向,自由定位
2023-04-19 10:53:03
RJS-II系列關(guān)節(jié)模組是泰科智能推出的一款基于模塊化理念設(shè)計(jì)、輕巧、高精度的協(xié)作機(jī)器人關(guān)節(jié),一體化集成的RJS-II不僅結(jié)構(gòu)尺寸更小,性價比更高,為您解決機(jī)器人在更多復(fù)雜環(huán)境中的適應(yīng)性和穩(wěn)定性
2023-04-19 14:54:26
RJS-II系列關(guān)節(jié)模組是泰科智能推出的一款基于模塊化理念設(shè)計(jì)、輕巧、高精度的協(xié)作機(jī)器人關(guān)節(jié),一體化集成的RJS-II不僅結(jié)構(gòu)尺寸更小,性價比更高,為您解決機(jī)器人在更多復(fù)雜環(huán)境中的適應(yīng)性和穩(wěn)定性
2023-04-19 15:03:00
RJU系列關(guān)節(jié)模組——面向商業(yè)、生活服務(wù)類應(yīng)用一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統(tǒng)外形的機(jī)器人關(guān)節(jié),而是一款能夠給機(jī)器人更多設(shè)計(jì)空間,和應(yīng)用領(lǐng)域的關(guān)節(jié),客戶可根據(jù)自身
2023-04-19 15:23:14
機(jī)器人關(guān)節(jié)電機(jī)是專業(yè)為機(jī)器人關(guān)節(jié)設(shè)計(jì)研發(fā)生產(chǎn)。電機(jī)既有中空大孔徑,能保證關(guān)節(jié)模組完美融合的組合, 電機(jī)的定轉(zhuǎn)子機(jī)構(gòu)緊湊,轉(zhuǎn)子采用了高性能稀土永磁材料,此系列電機(jī)轉(zhuǎn)矩脈動極低,易于速度控制和精確
2023-04-20 10:07:10
。 BEAR-H系列 外骨骼機(jī)器人是全球首款采用了柔性驅(qū)動器作為動力輸出的外骨骼機(jī)器人。 BEAR-H1 擁有帶動力的6關(guān)節(jié)(雙側(cè)髖、膝、踝),和髖
2023-09-20 17:25:48
電子系統(tǒng)防雷結(jié)構(gòu)示意圖
2006-06-30 19:50:091019
船用柴油機(jī)冷卻水循環(huán)結(jié)構(gòu)示意圖
2008-04-12 09:36:0410394
二沖程船用柴油機(jī)供油系統(tǒng)結(jié)構(gòu)示意圖
2008-04-12 09:39:313810
發(fā)動機(jī)配氣相位結(jié)構(gòu)示意圖
2008-04-12 14:36:483302
原子結(jié)構(gòu)示意圖(視頻動畫)
2008-05-28 21:50:1220291 鐵的原子結(jié)構(gòu)示意圖:
是用于表示
2008-05-28 22:06:58103464 
1-18號原子結(jié)構(gòu)示意圖
2008-05-28 22:17:5466563 
碳原子結(jié)構(gòu)示意圖
2008-05-28 22:22:3635717 
鉀原子結(jié)構(gòu)示意圖
2008-05-28 22:26:0846183 
氯離子結(jié)構(gòu)示意圖和鈉離子結(jié)構(gòu)示意圖
2008-05-28 22:34:1253126 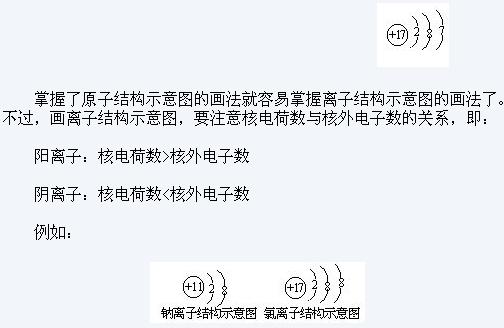
圖6-1、感應(yīng)系電度表的結(jié)構(gòu)示意圖 &
2008-06-18 21:41:013612 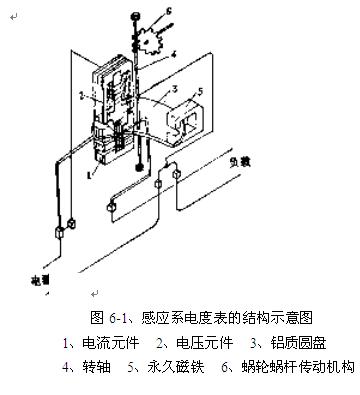
電腦鍵盤示意圖,計(jì)算機(jī)鍵盤示意圖
2009-03-10 10:51:21126946 電腦鍵盤功能示意圖
2009-03-10 10:53:0531146
飛機(jī)示意圖
2009-05-26 15:47:122242 磁電式傳感器結(jié)構(gòu)示意圖
圖1 轉(zhuǎn)速轉(zhuǎn)矩傳感器結(jié)構(gòu)示意圖11 內(nèi)
2009-06-06 17:55:593865 
游標(biāo)卡尺的結(jié)構(gòu)及示意圖
游標(biāo)卡尺簡稱卡尺,是一種比較精
2009-06-08 23:37:3314773 
讀數(shù)顯微鏡的結(jié)構(gòu)及示意圖
讀數(shù)顯微鏡是將測微螺旋和顯微鏡組合起來的作精確測量長度的儀器。它的測微螺距為1mm。
2009-06-08 23:43:5020870 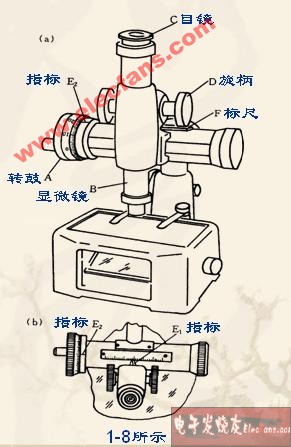
失會聚示意圖
2009-07-31 12:13:231011
順序傳輸制示意圖
2009-07-31 12:18:53825 混合動力汽車示意圖插入式混合動力汽車結(jié)構(gòu)示意圖:
2009-11-21 14:45:471975 單片機(jī)的模塊功能示意圖!
2016-02-19 11:32:0935 排針排母板對板接插示意圖.
2017-03-22 14:56:5728 本文檔內(nèi)容介紹了基于OPTAPA0405F4V32示意圖及安裝,供網(wǎng)友參考。
2017-10-10 14:12:501 本文主要介紹了多種元件極性示意圖。
2018-06-26 08:00:000 直流電機(jī)的結(jié)構(gòu)可分為靜止和轉(zhuǎn)動兩部分,靜止部分稱為定子,旋轉(zhuǎn)部分稱為轉(zhuǎn)子(也稱電樞)。本視頻主要介紹直流電機(jī)結(jié)構(gòu)示意圖。
2018-11-18 10:53:5547157 本文是關(guān)于創(chuàng)建邏輯示意圖的特殊主題的集合。這些主題是我多年來一直在腦子里傳播的主題。我希望你發(fā)現(xiàn)它們很有用。
2019-09-14 17:46:004233 
螺栓示意圖下載
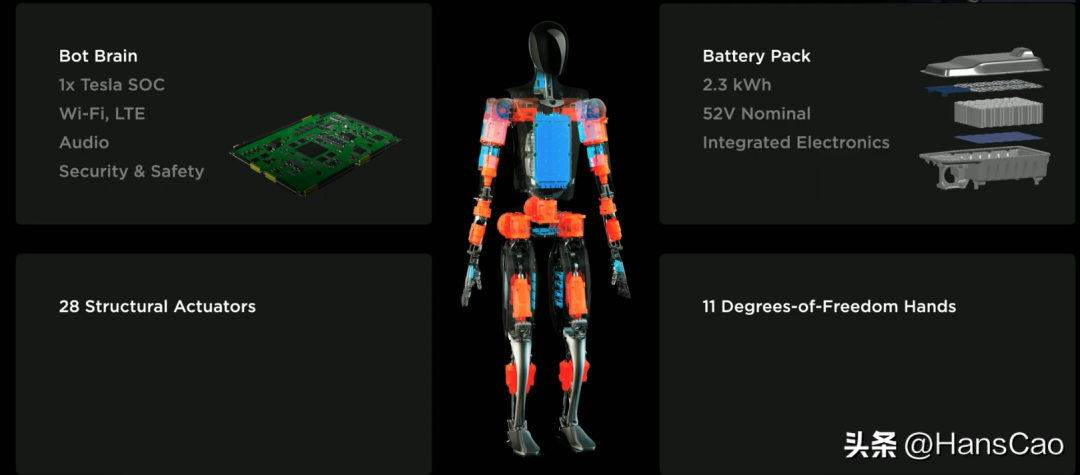
2022-01-10 14:15:5212 UMA和Optimus示意圖文件免費(fèi)下載。
2022-03-30 15:14:030 9DBL0455 參考示意圖
2023-03-13 20:06:210 5X35023 參考示意圖
2023-03-14 19:28:310 9FGV0841 參考示意圖
2023-03-15 19:40:190 9DBL09xx 參考示意圖
2023-03-15 20:12:170 9DBL0242 EVB 參考示意圖
2023-03-15 20:12:341 9DBL04x2 EVB 參考示意圖
2023-03-15 20:12:461 9DBL06xx 參考示意圖
2023-03-15 20:13:050 R2A20134EVB管示意圖
2023-03-17 19:19:080 9ZX21901 參考示意圖
2023-03-21 19:17:070 9ZX21201 參考示意圖
2023-03-21 19:17:170 9FGV1004 參考示意圖
2023-03-21 19:17:520 HSP50415 評估板示意圖s
2023-03-21 19:58:040 VersaClock III 評估板示意圖s
2023-04-12 18:35:270 9FGV1006 參考示意圖
2023-05-19 18:40:210 9FGV1006 參考示意圖
2023-06-29 19:33:180 9DBL0455 參考示意圖
2023-07-05 18:50:260 5X35023 參考示意圖
2023-07-05 19:54:190 9FGV0841 參考示意圖
2023-07-06 18:50:240 9DBL09xx 參考示意圖
2023-07-06 19:22:510 9DBL0242 EVB 參考示意圖
2023-07-06 19:23:100 9DBL04x2 EVB 參考示意圖
2023-07-06 19:23:270 9DBL06xx 參考示意圖
2023-07-06 19:23:370 R2A20134EVB管示意圖
2023-07-06 20:45:170 9ZX21901 參考示意圖
2023-07-07 19:14:500 9ZX21201 參考示意圖
2023-07-07 19:15:100 9FGV1004 參考示意圖
2023-07-07 19:15:461 HSP50415 評估板示意圖s
2023-07-07 19:58:390 VersaClock III 評估板示意圖s
2023-07-20 18:34:050
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論