 電子發燒友App
電子發燒友App


在機器人、無人機、醫療設備和工業系統等應用中,對精確運動控制的需求越來越多。無刷直流電機 (BLDC) 和交流驅動永磁同步電機 (PMSM) 可以提供所需的精度,同時還可以滿足以緊湊外形實現高效率的需求。但是與有刷直流電機和交流感應電機不同的是,它們很容易連接起來并運行,而 BLDC 和 PMSM 則要復雜得多。
例如,特別是像無傳感器矢量控制(亦稱磁場定向控制或 FOC)這樣的技術,不僅具有出色的效率,而且具有無需傳感器硬件的優勢,從而降低了成本,提高了可靠性。對設計人員來說,問題在于無傳感器矢量控制實現起來很復雜,因此使用這種技術會造成開發時間延長、成本增加并可能錯過上市時間窗口。
為了解決這一難題,設計人員可以轉而使用已經內置無傳感器矢量控制軟件的開發平臺和評估板,讓他們專注于系統設計問題,而不是陷入控制軟件編碼細微差別的糾結之中。此外,這些開發環境還包括了所有的電機控制器和電源管理硬件,并集成在一個完整的系統中,從而加快了產品上市速度。
本文簡要介紹了精密運動控制的一些需求,并回顧了直流有刷、交流感應、BLDC 和 PMSM 電機之間的差異。最后對矢量控制基礎知識進行總結,并介紹了 Texas Instruments、Infineon Technologies 和 Renesas Electronics 的幾個平臺和評估板,以及有利于開發精密運動控制系統的設計指導原則。
精密運動控制應用實例
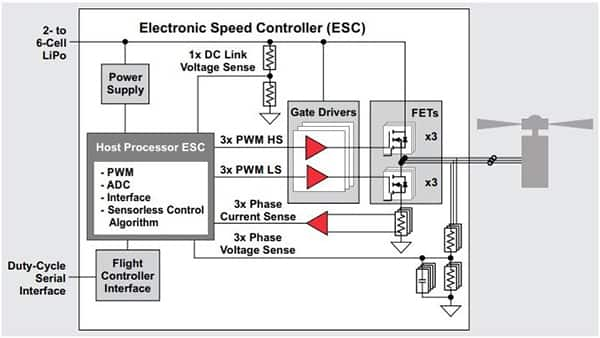
無人機是一種復雜的運動控制系統,通常采用四個或多個電機。為了使無人機能夠懸停、爬升或下降,需要具有精確、協調的運動控制能力(圖 1)。

圖 1:無人機通常使用四個或更多個電機,通常是 BLDC 或 PMSM,轉速高至每分鐘 12000 轉 (RPM) 或以上,并由電子速度控制器 (ESC) 驅動。這個例子展示了使用無刷電機與無傳感器控制的無人機中的 ESC 模塊。(圖片來源:Texas Instruments)
要想懸停,推動無人機上升的旋翼的凈推力必須平衡,并與拉動它下降的引力完全相等。同樣通過增加旋翼的推力(速度),無人機可以直接爬升。反之,減小旋翼推力會使無人機下降。此外,還有偏航(轉動無人機)、俯仰(無人機向前或向后飛行)和滾轉(無人機向左或向右飛行)。
精確和重復的運動是許多機器人應用的特點之一。固定式多軸工業機器人為了移動不同重量的物體,必須在三個維度上提供不同的力。機器人內部的電機在精確的點上提供可變的速度和扭矩(旋轉力),機器人的控制器用它來協調沿不同軸的運動,以實現精確的速度和定位。
固定式多軸工業機器人要在三個維度上提供不同的力,才能移動不同重量的物體,并與流水線上的其它機器人協調作業。
在輪式移動機器人上,可以使用精確的差動驅動系統來控制速度和運動方向。兩個電機與一個或兩個腳輪一起提供運動,以平衡負載。兩臺電機以不同的速度驅動,實現旋轉和方向的變化,而兩臺電機的速度相同,則可實現直線運動,向前或向后行走。雖然與傳統的轉向系統相比,電機控制器比較復雜,但這種方法更精確,機械上更簡單,因此更可靠。
電機選擇
基本直流電機和交流感應電機價格相對較低,驅動簡單,廣泛應用于從真空吸塵器到工業機械、起重機和電梯等領域。然而,雖然它們價格低廉,易于驅動,但無法提供機器人、無人機、醫療設備和精密工業設備等應用所需的精密操作。
簡易有刷直流電機是利用換向器和電刷,通過機械地切換電流方向,配合旋轉產生轉矩。有刷直流電機的缺點包括由于電刷磨損而需要維護,以及會產生電氣和機械噪音。脈寬調制 (PWM) 驅動器可用于控制轉速,但由于有刷直流電機固有的機械特性,難以實現精確控制和高效率。
BLDC 電機則取消了有刷直流電機的換向器和電刷,根據定子的卷繞方式,它也可以是一個 PMSM 電機。在 BLDC 電機中,定子線圈采用梯形繞組,產生的是梯形波形反電動勢 (EMF),而 PMSM 定子是正弦繞組,產生正弦的反電動勢 (Ebemf)(圖 3)。

圖 3:PMSM 電機產生正弦 Ebemf 波形,而 BLDC 產生梯形 Ebemf 波形。(圖片來源:Texas Instruments)
BLDC 和 PMSM 電機的轉矩是電流和反電動勢的函數。BLDC 電機采用方波電流驅動,而 PMSM 電機采用正弦電流驅動。
BLDC 電機特性:
- 采用六階方波直流電流,更易于控制
- 產生顯著的轉矩波動
- 與 PMSM 相比,成本和性能較低
- 可采用霍爾效應傳感器或無傳感器控制來實現
PMSM 電機特性:
- 使用三相正弦 PWM 進行更復雜的控制
- 無轉矩波動
- 效率、扭矩和成本均高于 BLDC
- 可采用軸編碼器或無傳感器控制來實現
什么是矢量控制?
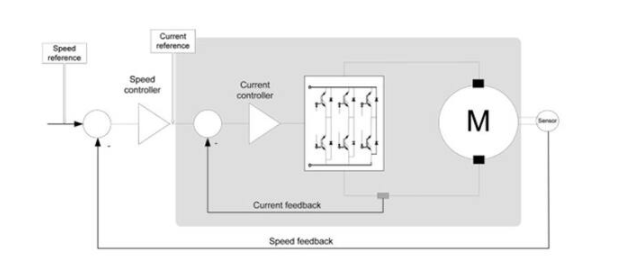
矢量控制是一種變頻電機驅動控制方法,三相電機的定子電流可以看成兩個正交分量,可以用矢量直觀地表示出來。一個分量定義了電機的磁通量,另一個分量定義了扭矩。矢量控制算法的核心是兩種數學變換:一是克拉克變換,將三相系統轉換為兩坐標系統;二是帕克變換,將兩相靜止系統向量轉換為旋轉系統向量,反之亦然。
使用克拉克和帕克變換能將可以控制的定子電流提供到轉子域。這樣做可以讓電機控制系統確定應該提供給定子的電壓,以便在動態變化的負載下獲得最大的轉矩。
高性能速度和/或位置控制需要實時和精確地了解轉子軸的位置和速度,以使相位激勵脈沖與轉子位置同步。這些信息通常是由傳感器提供的,如連在電機軸上的絕對編碼器和磁性旋轉變壓器。這些傳感器有幾個系統缺點:可靠性較低,易受噪聲影響,成本和重量較大,且比較復雜。無傳感器矢量控制則無需速度/位置傳感器。
高性能微處理器和數字信號處理器 (DSP) 能夠讓現代高效的控制理論融合到先進的系統建模中,確保任何實時電機系統都能獲得最佳功率和控制效率。預計由于微處理器和 DSP 的計算能力不斷提高,成本不斷下降,無傳感器控制幾乎將普遍取代傳感矢量控制,以及簡單但性能較弱的單變量標量每赫茲伏特 (V/f) 控制。
驅動工業和消費類機器人的三相 PMSM 和 BLDC 電機
為了繞過矢量控制的復雜性,設計人員可以使用現成的評估板。例如,Texas Instruments 的 DRV8301-69M-KIT 是一個基于 DIMM100 控制卡的主板評估模塊,設計人員可以用來開發三相 PMSM/BLDC 電機驅動方案(圖 4)。它包括帶有雙分流放大器和降壓穩壓器的 DRV8301 三相柵極驅動器,以及支持 InstaSPIN 的 Piccolo TMS320F28069M 微控制器 (MCU) 板。

圖 4:設計人員可以使用 DRV8301-69M-KIT 電機套件開發三相 PMSM/BLDC 電機驅動解決方案,該套件包括一個 DRV8301 和一個支持 InstaSPIN 的 Piccolo TMS320F28069M MCU 板。(圖片來源:Texas Instruments)
DRV8301-69M-KIT 是基于 Texas Instruments InstaSPIN-FOC 和 InstaSPIN-MOTION 技術的電機控制評估套件,用于旋轉三相 PMSM 和 BLDC 電機。通過 InstaSPIN,DRV8301-69M-KIT 可以讓開發人員快速識別、自動調節和控制三相電機,實現一個“即時”穩定、功能完善的電機控制系統。
結合 InstaSPIN 技術后,DRV8301-69M-KIT 提供了一個高性能、高能效、高成本效益的無傳感器或支持編碼器傳感器的 FOC 平臺,加快了開發速度和上市速度。應用包括 60 伏和 40 安培 (A) 以下的同步電機,用于驅動泵、門、電梯和風扇,以及工業和消費類機器人和自動化設備。
DRV8301-69M-KIT 硬件特性:
- 提供帶接口的三相逆變器底板,可插接 DIMM100 控制卡
- 一塊 DRV8301 三相逆變器集成電源模塊(帶一個集成式 1.5 A 降壓轉換器)底板,支持最高 60 伏的電壓和 40 A 的連續電流
- TMDSCNCD28069MISO InstaSPIN-FOC 和 InstaSPIN-MOTION 卡
- 能夠使用支持 MotorWare 的 TMDXCNCD28054MISO(單獨出售)和 TMDSCNCD28027F + 外部仿真器(單獨出售)
高性能、高效率 PMSM 和 BLDC 電機驅動器
Infineon Technologies 的 EVAL-IMM101T 是一款全功能入門套件,其中包括了一個 IMM101T 智能 IPM(集成電源模塊),它提供了一個全集成的、交鑰匙型高壓電機驅動解決方案,設計人員可以將其與高性能、高效率的 PMSM/BLDC 電機一起使用(圖 5)。EVAL-IMM101T 還包括對 IMM101T 智能 IPM 進行“開箱即用”式評估所需的其他必要電路,如整流器和 EMI 濾波級,以及用 USB 連接到 PC 的隔離調試器部分。

圖 5:IMM101T 評估板是一個完整的解決方案,包括運動控制引擎 (MCE 2.0)、柵極驅動器和三相逆變器,能夠使用無傳感器 FOC 驅動 PMSM 和 BLDC 電機。(圖片來源:Infineon Technologies)
開發 EVAL-IMM101T 就是為了在使用 IMM101T 智能 IPM 開發應用的第一步給設計人員提供支持。該評估板為無傳感器 FOC 配備了全部組件。它包含一個單相交流連接器、EMI 濾波器、整流器和用于連接電機的三相輸出。該功率級還包含用于電流感應的分流器和用于 DC Link 電壓測量的分壓器。
Infineon 的 IMM101T 在緊湊的 12 x 12 毫米 (mm) 表面貼裝封裝中為 PMSM/BLDC 驅動系統提供了不同的控制配置選項,最大限度地減少了外部元件數量和印刷電路板面積需要。該封裝經過熱增強處理,無論有無散熱器,都能表現良好。該封裝的特點是,封裝下方的高壓墊之間的爬電距離為 1.3 mm,便于表面安裝,提高了系統的穩健性。
IMM100 系列集成了 500 伏 FredFET 或 650 伏 CoolMOS MOSFET,具體取決于封裝中所采用的功率 MOSFET,應用額定輸出功率從 25 瓦 (W) 到 80 瓦不等,最大直流電壓為 500 伏/600 伏。在 600 伏版本中,如采用 Power MOS 技術,則額定電壓為 650 伏,如采用柵極驅動器,則額定電壓為 600 伏,這決定了系統的最大允許直流電壓。
24 伏電機控制評估系統
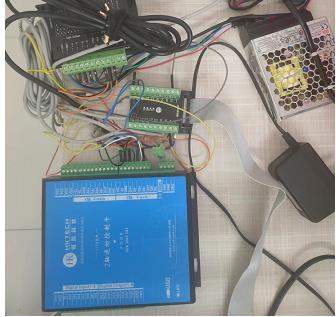
24 伏 PMSM/BLDC 電機驅動器的設計人員可以使用 Renesas 為 RX23T 微控制器提供的 RTK0EM0006S01212BJ 電機控制評估系統(圖 6)。RX23T 器件是適合于單逆變器控制的 32 位微控制器,其內置的浮點單元 (FPU) 使之能夠用于處理復雜的逆變器控制算法。這有助于大大減少軟件開發和維護所需的人工時間。

圖 6:Renesas 用于 RX23T 微控制器的 24 伏電機控制評估系統包括一個逆變器板,用于驅動評估包中提供的 PMSM。(圖片來源:Renesas Electronics)
此外,由于其內核先進,在軟件待機模式下(保留 RAM)消耗的電流僅為 0.45 微安 (μA)。RX23T 微控制器的工作電壓范圍為 2.7 至 5.5 伏,在引腳排列和軟件層面上與 RX62T 系列高度兼容。該套件包括:
結語
BLDC 和 PMSM 可用于實現緊湊、高效的精密運動控制解決方案。在 BLDC 和 PMSM 電機上運用無傳感器矢量控制技術,既省去了傳感器硬件需要,又降低了成本,提高了可靠性。但是在這些應用中,無傳感器矢量控制可能是一個復雜而耗時的過程。
綜上所述,設計人員可以使用附帶無傳感器矢量控制軟件的開發平臺和評估板應對這個問題。此外,這些開發環境還包括了所有的電機控制器和電源管理硬件,并集成在一個完整的系統中,從而加快了產品上市速度。
審核編輯:符乾江











 工商網監
工商網監
評論