伺服電機(jī)有哪幾種控制方式?伺服電機(jī)幾個(gè)量的區(qū)別是什么?有什么聯(lián)系?光電編碼器是什么工作原理?
2021-09-27 07:25:43
伺服電機(jī)是什么?其工作原理又是什么?伺服電機(jī)的程序是什么?有哪幾種方法?
2021-06-28 06:11:46
伺服電機(jī)是用來(lái)干什么的?編碼器由哪些部分組成?工作原理是什么?
2021-09-28 07:20:50
伺服電機(jī)由哪幾部分組成?工作原理是什么?
2021-09-26 07:32:16
什么是伺服系統(tǒng)?伺服電機(jī)的工作原理是什么?交流伺服電機(jī)的工作原理是什么?
2021-10-11 08:32:00
,飛機(jī)和許多其他設(shè)備。因此,本博客討論了伺服電機(jī)的定義,類型,機(jī)制,原理,工作,控制以及最后的應(yīng)用。定義:伺服電動(dòng)機(jī)是旋轉(zhuǎn)致動(dòng)器或允許對(duì)角位置,加速度和速度進(jìn)行精確控制的電動(dòng)機(jī)。
2021-06-27 07:14:57
伺服電機(jī)的運(yùn)動(dòng)伺服是由哪幾環(huán)組成的?PID對(duì)三環(huán)控制系統(tǒng)的差值調(diào)節(jié)有何影響?
2021-09-28 06:22:32
伺服電機(jī)驅(qū)動(dòng)器的工作原理?基本要求有哪些?
2021-09-28 08:20:29
交流伺服電機(jī)的工作原理伺服系統(tǒng)的組成及分類伺服馬達(dá)(交流)的特點(diǎn)伺服控制的選型步驟
2021-02-22 07:55:20
伺服驅(qū)動(dòng)器工作原理伺服驅(qū)動(dòng)器控制方式
2021-02-05 07:05:04
伺服驅(qū)動(dòng)器是什么工作原理?
2021-10-11 07:08:20
伺服驅(qū)動(dòng)器在控制信號(hào)的作用下驅(qū)動(dòng)執(zhí)行電機(jī),因此驅(qū)動(dòng)器是否能正常工作直接影響設(shè)備的整體性能。在伺服控制系統(tǒng)中,伺服驅(qū)動(dòng)器相當(dāng)于大腦,執(zhí)行電機(jī)相當(dāng)于手腳。而伺服驅(qū)動(dòng)器在伺服控制系統(tǒng)中的作用就是調(diào)節(jié)電機(jī)
2021-06-28 09:06:31
伺服驅(qū)動(dòng)器的工作原理及伺服驅(qū)動(dòng)器的常見接線方法是什么?
2021-09-29 06:12:11
步進(jìn)電機(jī)工作原理:通過控制電脈沖可以實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的轉(zhuǎn)向、速度和旋轉(zhuǎn)角度的控制;伺服電機(jī)工作原理:驅(qū)動(dòng)控制對(duì)象。被控對(duì)象受信號(hào)電壓大小和極性控制,電機(jī)的轉(zhuǎn)動(dòng)速度和方向也跟著變化。 步進(jìn)電機(jī)基于最基本
2023-03-15 13:30:31
請(qǐng)問一下三相同步發(fā)電機(jī)的工作原理是什么?其基本結(jié)構(gòu)是由哪些部分組成的?
2021-06-30 07:56:19
伺服電機(jī)的工作原理交流伺服電機(jī)和無(wú)刷直流伺服電機(jī)在功能上的區(qū)別永磁交流伺服電機(jī)同直流伺服電動(dòng)機(jī)比較的主要優(yōu)點(diǎn)
2021-01-28 06:13:25
交流伺服電機(jī)的工作原理是什么?
2021-09-26 06:37:53
交流永磁同步伺服電機(jī)的工作原理,永磁交流伺服電機(jī)的編碼器相位為何要與轉(zhuǎn)子磁極相位對(duì)齊其唯一目的就是要達(dá)成矢量控制的目標(biāo),使d軸勵(lì)磁分量和q軸出力分量解耦,令永磁交流伺服電機(jī)定子繞組產(chǎn)生的電磁場(chǎng)始終正交于轉(zhuǎn)子永磁場(chǎng),從而獲得最佳的出力效果,即“類直流特性”,這種控制方法也被稱為磁場(chǎng)定
2021-07-12 09:14:05
伺服電機(jī)有哪些應(yīng)用實(shí)例?工業(yè)伺服電機(jī)由哪幾個(gè)主要組成部分?工業(yè)伺服電機(jī)Mechaduino特點(diǎn)有哪些?
2021-06-28 09:41:18
微型電機(jī)的工作原理是什么
2021-03-15 07:22:52
無(wú)刷電機(jī)的工作原理是什么?無(wú)刷電機(jī)的優(yōu)點(diǎn)有哪些?無(wú)刷直流電動(dòng)機(jī)是由哪些部分組成的?
2021-08-02 07:28:45
有刷電機(jī)的工作原理是什么?無(wú)刷電機(jī)的工作原理是什么?有刷電機(jī)與無(wú)刷電機(jī)的性能差異有哪些?
2021-07-21 06:24:27
有刷直流電機(jī)由哪些部分組成?工作原理是什么?有刷/無(wú)刷電機(jī)的調(diào)速控制區(qū)別是什么?
2021-09-24 08:48:44
步進(jìn)電機(jī)的工作原理是什么?伺服電機(jī)的工作原理是什么?步進(jìn)電機(jī)與伺服電機(jī)有哪些區(qū)別?
2021-09-30 07:56:28
什么是伺服電機(jī)?伺服電機(jī)可分為哪幾類?交流伺服電機(jī)和無(wú)刷直流伺服電機(jī)在功能上有什么區(qū)別?
2021-10-09 07:44:31
多相繞組,轉(zhuǎn)子用永磁材料制成。直流伺服電機(jī)的基本工作原理:傳統(tǒng)直流伺服電機(jī)的基本工作原理與普通直流電機(jī)完全相同,依靠電樞電流與氣隙磁通的作用產(chǎn)生電磁轉(zhuǎn)矩,使伺服電機(jī)轉(zhuǎn)動(dòng)。通常采用電樞控制方式,即在保持勵(lì)
2018-09-13 10:02:46
`推薦課程:張飛軟硬開源:基于STM32的BLDC直流無(wú)刷電機(jī)驅(qū)動(dòng)器(視頻+硬件)http://url.elecfans.com/u/73ad899cfd 直流、交流伺服電機(jī)的結(jié)構(gòu)及工作原理一
2015-12-25 18:19:13
,就是小功率的直流電動(dòng)機(jī),其勵(lì)磁多采用電樞控制和磁場(chǎng)控制,但通常采用電樞控制。2、直流伺服電機(jī)的原理直流伺服電機(jī)的工作原理與普通的直流電機(jī)工作原理基本相同。依靠電樞氣流與氣隙磁通的作用產(chǎn)生電磁轉(zhuǎn)矩,使
2018-10-26 10:50:25
伺服電機(jī)的作用是什么?有哪些分類?編碼器具有哪些特點(diǎn)?工作原理是什么?
2021-09-29 08:33:51
伺服電機(jī)的種類有哪些?伺服電機(jī)主要的作用是什么?編碼器的結(jié)構(gòu)域工作原理是什么?編碼器的分類和特點(diǎn)有哪些?伺服電機(jī)與編碼器的工作是什么?
2021-06-28 08:11:44
伺服閥的工作原理
圖2是伺服閥的工作原理圖。
2008-11-19 16:21:18 15236
15236 直流伺服電動(dòng)機(jī)的工作原理: 直流伺服電動(dòng)機(jī)的結(jié)構(gòu)與直流電動(dòng)機(jī)基本相同。只是為減小轉(zhuǎn)動(dòng)慣量,電機(jī)做得細(xì)長(zhǎng)一些。所
2008-11-19 23:38:0913915 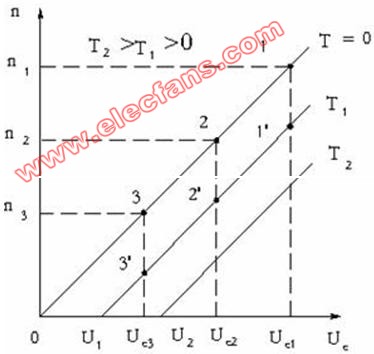
步進(jìn)電機(jī)的工作原理
以磁阻式步進(jìn)電機(jī)為例,介紹一下步進(jìn)電機(jī)的工作原理,圖1. 1是磁阻式步進(jìn)電機(jī)工作原理的示意圖。它的定子上有六個(gè)
2009-03-30 16:53:048424 
步進(jìn)式伺服驅(qū)動(dòng)系統(tǒng)工作原理
步進(jìn)式伺服驅(qū)動(dòng)系統(tǒng)主要由步進(jìn)電機(jī)驅(qū)動(dòng)控制線路和步進(jìn)電機(jī)兩部分組成,如圖5--7所示。驅(qū)動(dòng)控制線路
2009-05-06 23:44:393377 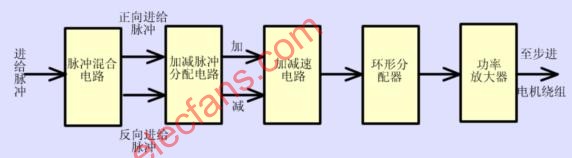
交流伺服電機(jī)的工作原理
交流伺服電機(jī)驅(qū)動(dòng)是最新發(fā)展起來(lái)的新型伺服系統(tǒng),也是當(dāng)前機(jī)床進(jìn)給驅(qū)動(dòng)系統(tǒng)方面的一個(gè)新動(dòng)向。該系統(tǒng)
2009-05-06 23:50:1040286 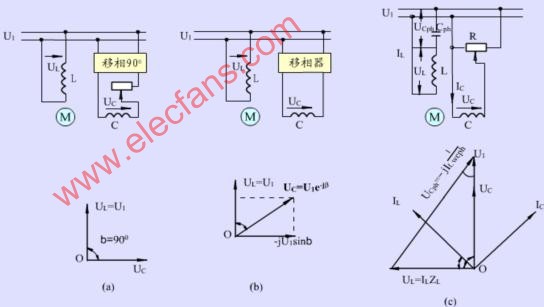
鑒幅式伺服系統(tǒng)的工作原理
圖5--25是鑒幅式伺服系統(tǒng)的方框圖。該系統(tǒng)由測(cè)量元件及信號(hào)處理線路、數(shù)模轉(zhuǎn)換器、比較器、驅(qū)動(dòng)環(huán)節(jié)
2009-05-06 23:52:592090 
交流伺服電機(jī)的工作原理
伺服電機(jī)內(nèi)部的轉(zhuǎn)子是永磁鐵,驅(qū)動(dòng)器控制的U/V/W三相電形成電磁場(chǎng),轉(zhuǎn)子在此磁場(chǎng)的作用下轉(zhuǎn)動(dòng),同時(shí)電
2009-10-25 14:33:493771 伺服電機(jī)工作原理
伺服電機(jī)內(nèi)部的轉(zhuǎn)子是永磁鐵,驅(qū)動(dòng)器控制的U/V/W三相電形成電磁場(chǎng),轉(zhuǎn)子在此磁場(chǎng)的作用下轉(zhuǎn)動(dòng),同時(shí)電機(jī)自帶的編碼器反饋信號(hào)給
2010-01-09 21:09:463200 三態(tài)門的組成及工作原理
2010-02-28 19:13:2624010 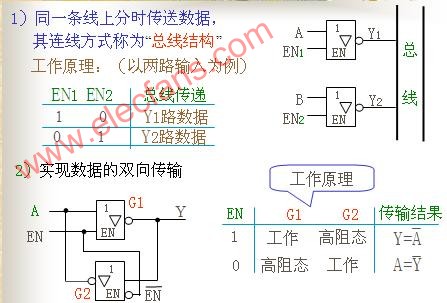
伺服電機(jī)(servomotor)是指在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)可使控制速度,位置精度非常準(zhǔn)確,可以將電壓信號(hào)轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動(dòng)控制對(duì)象。
2017-03-22 11:26:318537 交流伺服電機(jī)的工作原理:伺服系統(tǒng)- -般由伺服放大器和伺服電機(jī)構(gòu)成。伺服電機(jī)內(nèi)部的轉(zhuǎn)子是永磁鐵,伺服放大器控制的U,V,W 三相電形成電磁場(chǎng),轉(zhuǎn)子在此磁場(chǎng)的作用下轉(zhuǎn)動(dòng),同時(shí)電機(jī)自帶的編碼器反饋信號(hào)給驅(qū)動(dòng)器,驅(qū)動(dòng)器根據(jù)反饋值與目標(biāo)值進(jìn)行比較,調(diào)整轉(zhuǎn)子轉(zhuǎn)動(dòng)的角度。伺服電機(jī)的精度決定于編碼器的分辨率。
2017-10-17 09:28:11 25
25 伺服電機(jī)工作原理伺服電機(jī)內(nèi)部的轉(zhuǎn)子是永磁鐵,驅(qū)動(dòng)器控制的U/V/W三相電形成電磁場(chǎng),轉(zhuǎn)子在此磁場(chǎng)的作用下轉(zhuǎn)動(dòng),同時(shí)電機(jī)自帶的編碼器反饋信號(hào)給驅(qū)動(dòng)器,驅(qū)動(dòng)器根據(jù)反饋值與目標(biāo)值進(jìn)行比較,調(diào)整轉(zhuǎn)子轉(zhuǎn)動(dòng)
2017-10-17 14:15:0492 因?yàn)椋?b class="flag-6" style="color: red">伺服電機(jī)本身具備發(fā)出脈沖的功能,所以伺服電機(jī)每旋轉(zhuǎn)一個(gè)角度,都會(huì)發(fā)出對(duì)應(yīng)數(shù)量的脈沖,這樣,和伺服電機(jī)接受的脈沖形成了呼應(yīng),或者叫閉環(huán),如此一來(lái),系統(tǒng)就會(huì)知道發(fā)了多少脈沖給伺服電機(jī),同時(shí)又收了多少脈沖回來(lái),這樣,就能夠很精確的控制電機(jī)的轉(zhuǎn)動(dòng),從而實(shí)現(xiàn)精確的定位,可以達(dá)到0.001mm。
2018-04-12 15:06:2613696 本文開始介紹了伺服電機(jī)的工作原理與優(yōu)點(diǎn),其次介紹了伺服電機(jī)的選型步驟與最簡(jiǎn)單伺服電機(jī)選型計(jì)算方式,最后介紹了伺服電機(jī)選型的注意事項(xiàng)。
2018-04-25 14:36:4741422 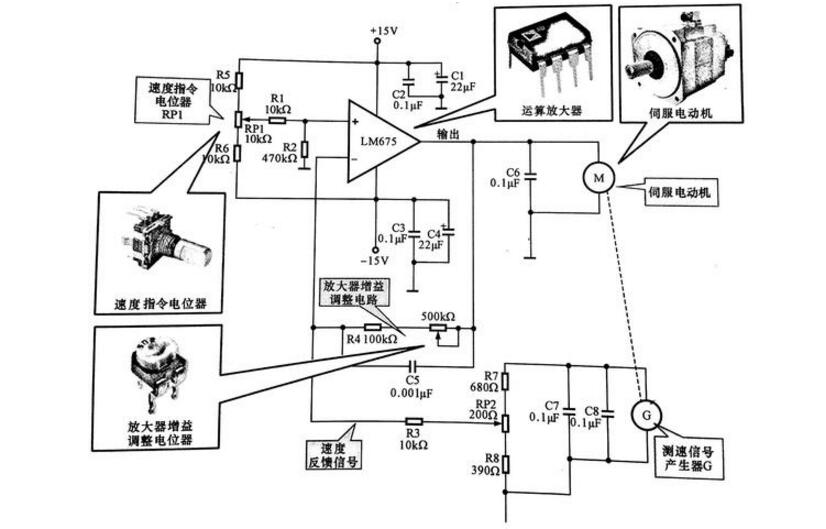
本文首先介紹了步進(jìn)電機(jī)和舵機(jī)及伺服電機(jī)的區(qū)別,其次介紹了步進(jìn)電機(jī)基本原理,最后介紹了舵機(jī)的構(gòu)造的原理及介紹了伺服電機(jī)的工作原理。
2018-05-11 08:45:27128984 本文首先闡述了舵機(jī)和伺服電機(jī)的區(qū)別,其次介紹了舵機(jī)的類型與結(jié)構(gòu),最后介紹了伺服電機(jī)的工作原理及作用。
2018-05-11 14:18:5271623 本文首先介紹看伺服系統(tǒng)的結(jié)構(gòu)組成與工作原理,其次介紹了伺服系統(tǒng)分類及基本要求與特點(diǎn),最后介紹了伺服系統(tǒng)在自動(dòng)化生產(chǎn)中的應(yīng)用。
2018-06-01 17:06:0933197 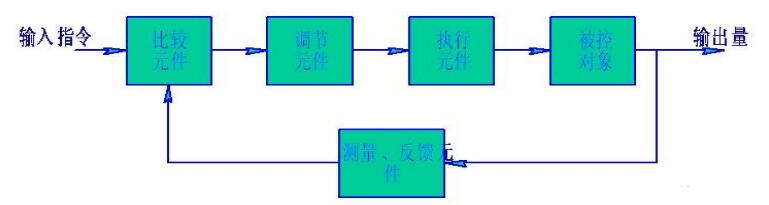
“伺服”一詞源于希臘語(yǔ)“奴隸”的意思。“伺服電機(jī)”可以理解為絕對(duì)服從控制信號(hào)指揮的電機(jī):在控制信號(hào)發(fā)出之前,轉(zhuǎn)子靜止不動(dòng);當(dāng)控制信號(hào)發(fā)出時(shí),轉(zhuǎn)子立即轉(zhuǎn)動(dòng);當(dāng)控制信號(hào)消失時(shí),轉(zhuǎn)子能即時(shí)停轉(zhuǎn)。
2018-09-30 09:28:3322411 伺服驅(qū)動(dòng)器是用來(lái)驅(qū)動(dòng)伺服電機(jī)的,伺服電機(jī)可以是步進(jìn)電機(jī),也可以是交流異步電機(jī),主要為了實(shí)現(xiàn)快速、精確定位,像那種走走停停、精度要求很高的場(chǎng)合用的很多。
2019-12-11 10:53:061337 伺服電機(jī)如今被用于生活中的方方面面,那么伺服電機(jī)工作原理是什么呢?伺服電機(jī)是利用電壓信號(hào)來(lái)控制轉(zhuǎn)矩和轉(zhuǎn)速的,這也讓伺服電機(jī)有著更高的精準(zhǔn)度,在操作過程中能夠輕松的利用電壓來(lái)控制轉(zhuǎn)速的輸出,從而滿足不同情況下的轉(zhuǎn)速需求,保證了動(dòng)力的完美利用,確保了機(jī)械應(yīng)用效率更高。
2020-08-19 16:46:301555 伺服電機(jī)英文名為Servo motor,是一種在伺服系統(tǒng)中控制機(jī)械電子元件的發(fā)動(dòng)機(jī),是補(bǔ)助馬達(dá)簡(jiǎn)潔變速電子裝置之一。伺服電機(jī)可將電壓信號(hào)轉(zhuǎn)化為轉(zhuǎn)矩和專屬以驅(qū)動(dòng)控制對(duì)象。伺服電機(jī)轉(zhuǎn)子轉(zhuǎn)速受輸入信號(hào)控制
2021-07-15 14:57:4541256 控制,實(shí)現(xiàn)高精度的傳動(dòng)系統(tǒng)定位,是傳動(dòng)技術(shù)的高端產(chǎn)品。 ? ? 工作原理: ? ? ? ?安川伺服驅(qū)動(dòng)器維修安川伺服驅(qū)動(dòng)器是用來(lái)控制伺服電機(jī)的,作用類似于變頻器驅(qū)動(dòng)交流電機(jī),屬于伺服系統(tǒng)的一部分。 ? ? ? ?安川伺服驅(qū)動(dòng)器采
2021-07-16 11:23:414292 什么是伺服電機(jī) 伺服電機(jī):是在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。 伺服電機(jī)可以控制速度,位置精度非常準(zhǔn)確,可以將電壓信號(hào)轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動(dòng)控制對(duì)象。伺服電機(jī)轉(zhuǎn)子轉(zhuǎn)速
2021-07-18 10:13:2235492 西門子伺服電機(jī)是在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。西門子伺服電機(jī)是可以連續(xù)旋轉(zhuǎn)的電機(jī)械轉(zhuǎn)換器。作為液壓閥控制器的西門子伺服電機(jī),屬于功率很小的微特電機(jī),以永磁式直流
2021-07-19 10:18:576219 伺服電機(jī)是指在伺服系統(tǒng)中控制機(jī)械元件的發(fā)動(dòng)機(jī),也是一種補(bǔ)助馬達(dá)間接變速裝置,常被應(yīng)用在工業(yè)自動(dòng)控制系統(tǒng)中,主要分為交流同服電機(jī)和直流伺服電機(jī)。
2021-07-19 16:36:2912055 三洋伺服電機(jī)的工作原理: 伺服是指在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。 ? ? ? ?伺服電機(jī)分為直流和交流伺服電動(dòng)機(jī)兩大類,其主要特點(diǎn)是,當(dāng)信號(hào)電壓為零時(shí)無(wú)自轉(zhuǎn)現(xiàn)象
2021-07-20 16:53:473949 伺服電機(jī) 減速機(jī)的原理: ? ? ? 伺服電機(jī)減速機(jī)就是利用各級(jí)齒輪傳動(dòng)來(lái)達(dá)到降速的目的,就是由各級(jí)齒輪副組成的,一般用于低轉(zhuǎn)速大扭矩的傳動(dòng)設(shè)備,把電動(dòng)機(jī)、內(nèi)燃機(jī)或其它高速運(yùn)轉(zhuǎn)的動(dòng)力通過減速機(jī)的輸入
2021-08-03 10:42:135880 控制,實(shí)現(xiàn)高精度的傳動(dòng)系統(tǒng)定位,是傳動(dòng)技術(shù)的高端產(chǎn)品。 ? ? 工作原理: ? ? ? ?安川伺服驅(qū)動(dòng)器維修安川伺服驅(qū)動(dòng)器是用來(lái)控制伺服電機(jī)的,作用類似于變頻器驅(qū)動(dòng)交流電機(jī),屬于伺服系統(tǒng)的一部分。 ? ? ? ?安川伺服驅(qū)動(dòng)器采
2021-08-04 09:15:105042 伺服電機(jī)工作原理 在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī)稱為伺服電機(jī),它是一種補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)能夠控制速度,并且伺服電機(jī)的位置精度非常的高,能夠?qū)㈦妷盒盘?hào)轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動(dòng)控制對(duì)象
2021-08-06 17:44:5231752 控制,實(shí)現(xiàn)高精度的傳動(dòng)系統(tǒng)定位,是傳動(dòng)技術(shù)的高端產(chǎn)品。 ? ? 工作原理: ? ? ? ?安川伺服驅(qū)動(dòng)器維修安川伺服驅(qū)動(dòng)器是用來(lái)控制伺服電機(jī)的,作用類似于變頻器驅(qū)動(dòng)交流電機(jī),屬于伺服系統(tǒng)的一部分。 ? ? ? ?安川伺服驅(qū)動(dòng)器采
2021-08-06 20:26:545096 伺服系統(tǒng)(servo mechanism)是使物體的位置、方位、狀態(tài)等輸出被控量能夠跟隨輸入目標(biāo)(或給定值)的任意變化的自動(dòng)控制系統(tǒng)。伺服主要靠脈沖來(lái)定位,基本上可以這樣理解,伺服電機(jī)接收到1個(gè)脈沖,就會(huì)旋轉(zhuǎn)1個(gè)脈沖對(duì)應(yīng)的角度,從而實(shí)現(xiàn)位移。
2022-10-31 14:31:451815 交流伺服電機(jī)通常都是單相異步電動(dòng)機(jī),有鼠籠形轉(zhuǎn)子和杯形轉(zhuǎn)子兩種結(jié)構(gòu)形式。與普通電機(jī)一樣,交流伺服電機(jī)也由定子和轉(zhuǎn)子構(gòu)成。
2022-12-05 20:35:152701 伺服電機(jī)是自動(dòng)控制裝置中被用作執(zhí)行元件的微特電機(jī),其功能是將電信號(hào)轉(zhuǎn)換成轉(zhuǎn)軸的角位移或角速度。
2023-01-11 11:54:263247 繼步進(jìn)電機(jī)的結(jié)構(gòu)之后,本文將介紹步進(jìn)電機(jī)的基本工作原理。步進(jìn)電機(jī)的基本工作原理(單相勵(lì)磁),下面使用下圖來(lái)介紹步進(jìn)電機(jī)的基本工作原理。這是上一篇“步進(jìn)電機(jī)的結(jié)構(gòu)”中給出的兩相雙極型線圈每一相(一組線圈)的勵(lì)磁示例。
2023-02-24 09:51:102621 
伺服電機(jī)的作用是驅(qū)動(dòng)控制對(duì)象。被控對(duì)象的轉(zhuǎn)距和轉(zhuǎn)速受信號(hào)電壓控制,信號(hào)電壓的大小和極性改變時(shí),電機(jī)的轉(zhuǎn)動(dòng)速度和方向也跟著變化。
2023-03-01 15:42:005397 交流伺服電動(dòng)機(jī)定子的構(gòu)造基本上與電容分相式單相異步電動(dòng)機(jī)相似其定子上裝有兩個(gè)位置互差90°的繞組,一個(gè)是勵(lì)磁繞組Rf,它始終接在交流電壓Uf上;另一個(gè)是控制繞組L,聯(lián)接控制信號(hào)電壓Uc。所以交流伺服電動(dòng)機(jī)又稱兩個(gè)伺服電動(dòng)機(jī)。
2023-03-02 10:49:18700 伺服電機(jī)是一種可以通過控制器精確地控制位置、速度和加速度的電機(jī)。伺服電機(jī)通常由電機(jī)、編碼器、控制器等部分組成。控制器根據(jù)編碼器反饋的位置信息,調(diào)節(jié)電機(jī)的驅(qū)動(dòng)電流,從而控制電機(jī)的位置和運(yùn)動(dòng)。
2023-03-03 11:06:301730 三相電機(jī)是指由三個(gè)交流電源供電的電機(jī),其工作原理是利用三相電源所產(chǎn)生的旋轉(zhuǎn)磁場(chǎng)來(lái)產(chǎn)生機(jī)械運(yùn)動(dòng)。三相電機(jī)通常由轉(zhuǎn)子、定子、電源和控制裝置等組成。根據(jù)不同的工作原理和結(jié)構(gòu)特點(diǎn),三相電機(jī)可以分為異步電機(jī)、同步電機(jī)、直流電機(jī)等不同類型。
2023-03-06 11:14:479391 交流伺服系統(tǒng)通常由以下幾個(gè)主要組成部分構(gòu)成:
交流伺服電機(jī):交流伺服電機(jī)是伺服系統(tǒng)的核心部件之一,它的轉(zhuǎn)速、力矩和位置等運(yùn)動(dòng)狀態(tài)能夠受到精密控制。常用的交流伺服電機(jī)有感應(yīng)電機(jī)和永磁同步電機(jī)等。
2023-03-07 14:15:362660 伺服電機(jī)是一種能夠通過精確控制電機(jī)轉(zhuǎn)速、位置和加速度等參數(shù)來(lái)實(shí)現(xiàn)高精度運(yùn)動(dòng)控制的電機(jī)。
伺服電機(jī)的工作原理與普通的直流電機(jī)或步進(jìn)電機(jī)有很大不同。它由電機(jī)、減速器、編碼器和控制器組成。在工作
2023-03-07 14:46:422932 伺服電機(jī)通常是一種帶有反饋控制系統(tǒng)的電機(jī),可以根據(jù)控制器的指令實(shí)現(xiàn)精確位置、速度或扭矩控制。伺服電機(jī)通常適用于需要精密控制的應(yīng)用,如自動(dòng)化生產(chǎn)線、機(jī)器人等。
直線電機(jī)和伺服電機(jī)都是用于精確控制運(yùn)動(dòng)的電機(jī),但它們的結(jié)構(gòu)和工作原理有所不同,下面是它們之間的區(qū)別:
2023-03-07 15:01:356590 伺服電機(jī)通常由以下幾個(gè)主要部分組成:
電機(jī)部分:伺服電機(jī)的電機(jī)部分一般由轉(zhuǎn)子、定子、繞組、磁極等部件組成。電機(jī)的類型包括直流伺服電機(jī)、交流伺服電機(jī)、步進(jìn)伺服電機(jī)等,每種類型的電機(jī)在結(jié)構(gòu)和控制方式上都有所不同。
2023-03-07 15:14:586212 直流伺服電機(jī)是一種常見的精密控制電機(jī),其工作原理基于磁通定律和法拉第電磁感應(yīng)定律。
直流伺服電機(jī)由直流電源、電機(jī)、編碼器和控制器等組成。當(dāng)直流電源施加到電機(jī)上時(shí),會(huì)在電機(jī)中產(chǎn)生一個(gè)磁場(chǎng)
2023-03-10 11:50:322785 總之,PLC控制伺服電機(jī)正反轉(zhuǎn)的工作原理是通過編寫程序、檢測(cè)輸入信號(hào)、信號(hào)處理、控制輸出、反饋監(jiān)測(cè)等步驟來(lái)實(shí)現(xiàn)。
2023-03-22 17:40:097475 伺服設(shè)備工作原理 1、伺服系統(tǒng)(servo mechanism)是使物體的位置、方位、狀態(tài)等輸出被控量能夠跟隨輸入目標(biāo)(或給定值)的任意變化的自動(dòng)控制系統(tǒng)。伺服主要靠脈沖來(lái)定位,基本上可以這樣理解
2023-04-19 10:47:24542 伺服驅(qū)動(dòng)電機(jī),簡(jiǎn)稱伺服電機(jī),是在普通電機(jī)的基礎(chǔ)上集成編碼器的產(chǎn)物。
2023-05-08 09:55:13458 無(wú)刷直流電機(jī)由減速電機(jī)主體和驅(qū)動(dòng)器組成,是典型的機(jī)電一體化產(chǎn)品,其工作原理如下:
2021-12-23 14:25:111157 
伺服電機(jī)具有獨(dú)特的特性,即根據(jù)輸入信號(hào)的脈沖寬度轉(zhuǎn)向特定角度(0,90,180)。這些伺服電機(jī)廣泛用于機(jī)器人應(yīng)用、機(jī)械控制等。通常微控制器將用于控制伺服電機(jī),但偶爾您會(huì)發(fā)現(xiàn)一些其他IC用于此目的。本文介紹了伺服電機(jī)的工作原理和工作原理。
2023-06-29 15:44:291642 
伺服電機(jī)的工作原理是通過內(nèi)部的反饋系統(tǒng),對(duì)電機(jī)的運(yùn)轉(zhuǎn)狀態(tài)進(jìn)行監(jiān)測(cè)和調(diào)整,使得電機(jī)能夠在預(yù)定的位置和速度上運(yùn)轉(zhuǎn)。在伺服電機(jī)中,通常會(huì)采用編碼器作為反饋傳感器,通過檢測(cè)電機(jī)轉(zhuǎn)子的位置和速度信號(hào),以實(shí)現(xiàn)對(duì)電機(jī)的控制和調(diào)整。
2023-08-26 11:06:032494 伺服電機(jī)的構(gòu)造伺服電機(jī)是直流電機(jī),具有以下5個(gè)部分:1.定子繞組:這種類型的繞組繞在電機(jī)的固定部分。它也被稱為電機(jī)的勵(lì)磁繞組。2.轉(zhuǎn)子繞組:這種類型的繞組繞在電機(jī)的旋轉(zhuǎn)部分。它也被稱為電機(jī)的電樞繞組
2023-08-31 08:08:401330 
伺服電機(jī)是一種能夠?qū)㈦娔苻D(zhuǎn)化為機(jī)械能的裝置,它可以精確地控制速度和位置,具有反應(yīng)快速等特點(diǎn),通常被應(yīng)用在自動(dòng)控制系統(tǒng)中執(zhí)行元件,是伺服系統(tǒng)中的重要組成部分。
2023-10-24 10:59:15464 
伺服電機(jī)可以控制速度,位置精度非常準(zhǔn)確,可以將電壓信號(hào)轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動(dòng)控制對(duì)象。伺服電機(jī)轉(zhuǎn)子轉(zhuǎn)速受輸入信號(hào)控制,并能快速反應(yīng),在自動(dòng)控制系統(tǒng)中,用作執(zhí)行元件,且具有機(jī)電時(shí)間常數(shù)小、線性度高等
2023-11-08 18:20:201254 電機(jī)定子和轉(zhuǎn)子是電機(jī)的重要組成部分,它們協(xié)同工作實(shí)現(xiàn)電機(jī)的運(yùn)轉(zhuǎn)。本文將詳細(xì)介紹電機(jī)定子和轉(zhuǎn)子的工作原理以及它們之間的區(qū)別。
2023-11-18 16:30:263884 電機(jī)驅(qū)動(dòng)電路的工作原理 電機(jī)驅(qū)動(dòng)電路是控制電機(jī)運(yùn)行的核心部分,其工作原理涉及到電機(jī)的運(yùn)行和控制。本文將詳細(xì)介紹電機(jī)驅(qū)動(dòng)電路的工作原理,包括電路的組成、工作過程和重要參數(shù)。 一、電機(jī)驅(qū)動(dòng)電路的組成
2023-12-13 10:54:371540 技術(shù)、CNC機(jī)床、自動(dòng)化裝配線、印刷設(shè)備以及各種需要精確定位的應(yīng)用中。 工作原理概述 伺服電機(jī),也稱為執(zhí)行電動(dòng)機(jī),在自動(dòng)控制系統(tǒng)中扮演執(zhí)行機(jī)構(gòu)的角色,負(fù)責(zé)將接收到的電信號(hào)轉(zhuǎn)化為電機(jī)軸上的角位移或角速度輸出。其顯
2024-02-16 10:55:00482 伺服電機(jī)是一種特殊的電機(jī),能夠根據(jù)控制信號(hào)的反饋信息來(lái)調(diào)整輸出轉(zhuǎn)速和位置,具有較高的精度和響應(yīng)速度,廣泛應(yīng)用于機(jī)械控制系統(tǒng)中。本文將詳細(xì)介紹伺服電機(jī)的結(jié)構(gòu)和工作原理。 一、結(jié)構(gòu) 伺服電機(jī)主要由電機(jī)
2024-02-02 14:20:09322 和運(yùn)動(dòng)控制的領(lǐng)域,如數(shù)控機(jī)床、機(jī)器人、自動(dòng)化生產(chǎn)線等。 伺服電機(jī)的工作原理可以簡(jiǎn)單總結(jié)為以下幾個(gè)步驟: 接收指令信號(hào):控制器接收來(lái)自外部設(shè)備(如PLC)的指令信號(hào),指令信號(hào)包含了期望的運(yùn)動(dòng)狀態(tài),如位置和速度。 反
2024-02-04 10:10:45248 的工作原理 交流伺服電機(jī)是一種特殊的交流電機(jī),由電機(jī)本身和電機(jī)驅(qū)動(dòng)器組成。電機(jī)驅(qū)動(dòng)器負(fù)責(zé)電機(jī)的控制和保護(hù)功能,通常包含電源模塊、控制模塊、位置檢測(cè)模塊和功率輸出模塊。 在交流伺服電機(jī)中,控制模塊起著核心的作用。它接
2024-02-18 14:59:25276 的了解和參考。 伺服電機(jī)對(duì)拖測(cè)功機(jī) 一、伺服電機(jī)對(duì)拖測(cè)功機(jī)的工作原理 伺服電機(jī)對(duì)拖測(cè)功機(jī)主要由兩臺(tái)伺服電機(jī)、控制系統(tǒng)、測(cè)量系統(tǒng)、加載機(jī)構(gòu)等組成。其中,兩臺(tái)伺服電機(jī)分別作為驅(qū)動(dòng)電機(jī)和負(fù)載電機(jī),通過傳動(dòng)機(jī)構(gòu)相互連
2024-03-21 15:22:4999 
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論