雙極性步進(jìn)電機(jī)包含兩繞組,為了使電機(jī)運(yùn)行平穩(wěn),不斷的給這兩個(gè)線圈加以相位差90度的正弦波,步進(jìn)電機(jī)就開(kāi)始轉(zhuǎn)動(dòng)起來(lái)。
2017-06-30 13:50:22 16548
16548 變頻技術(shù)在工業(yè)生產(chǎn)中有著舉足輕重的作用,它的技術(shù)核心就是變頻器和變頻電機(jī)。工作中,總是遇到變頻電機(jī)故障,該怎么辦?是哪里“有毛病”了?如何才能檢查出故障所在?有什么解決方法呢?
2022-09-06 14:44:113129 步進(jìn)電機(jī)是一個(gè)用數(shù)字來(lái)控制運(yùn)動(dòng)的數(shù)字化電機(jī),特別適用于精準(zhǔn)控制場(chǎng)合。今天,我們將通過(guò)步進(jìn)電機(jī)控制云臺(tái)準(zhǔn)確定位轉(zhuǎn)動(dòng)的應(yīng)用,詳細(xì)講解一下對(duì)步進(jìn)電機(jī)運(yùn)動(dòng)的控制。
2022-09-08 14:21:42813 步進(jìn)電機(jī)5種驅(qū)動(dòng)方法的利弊分析 驅(qū)動(dòng)器技術(shù)的不斷發(fā)展,有恒電壓驅(qū)動(dòng)、高低壓驅(qū)動(dòng)、自激式恒電流斬波驅(qū)動(dòng)、電流比較斬波驅(qū)動(dòng)、潛進(jìn)式驅(qū)動(dòng)等驅(qū)動(dòng)方法。而這些驅(qū)動(dòng)方法各有各自的優(yōu)點(diǎn),也有各自的缺點(diǎn)。下面分析下
2016-01-27 14:45:02
如何控制步進(jìn)電機(jī)的方向?步進(jìn)電機(jī)振動(dòng)大,噪聲也很大,什么原因?為什么步進(jìn)電機(jī)通電后,電機(jī)不運(yùn)行?
2021-10-08 08:59:04
(\"ni\"); stepper.step(-1024); //4步模式下旋轉(zhuǎn)一周用2048 步。 delay(500);}使用上述代碼 步進(jìn)電機(jī)只抖動(dòng)不轉(zhuǎn)是什么問(wèn)題?
2023-11-10 08:15:41
步進(jìn)電機(jī)噪聲大的原因,步進(jìn)電機(jī)的特性測(cè)量和噪音和振動(dòng)的測(cè)量,步進(jìn)電機(jī)基礎(chǔ)(6.2)-步進(jìn)電機(jī)的特性測(cè)量方法-暫態(tài)(阻尼)特性的測(cè)量前言基本信息前言說(shuō)明6.4 暫態(tài)(阻尼)特性的測(cè)量6.5 噪音和振動(dòng)
2021-07-08 09:03:40
步進(jìn)電機(jī)基礎(chǔ)(8.2)-步進(jìn)電機(jī)的問(wèn)題解決方案-降低振動(dòng)噪音的解決方法前言基本信息前言說(shuō)明8.2 降低振動(dòng)噪音的解決方法1. 與驅(qū)動(dòng)電路有關(guān)的方法2. 與電機(jī)有關(guān)的方法降低振動(dòng)和噪音效果好的方法如下
2021-07-08 09:40:18
。解決方法: 通過(guò)一個(gè)加速和減速過(guò)程,即以較低的速度起動(dòng),而后逐漸加速到某一速度運(yùn)行,再逐漸減速直至停止。原因三:步進(jìn)電動(dòng)機(jī)產(chǎn)生共振共振也是引起丟步的一個(gè)原因。步進(jìn)電機(jī)處于連續(xù)運(yùn)行狀態(tài)時(shí),如果控制脈沖
2023-04-15 16:33:58
步進(jìn)電機(jī)基礎(chǔ)(8.1)-步進(jìn)電機(jī)的問(wèn)題解決方案-增加動(dòng)態(tài)轉(zhuǎn)矩的解決方法前言基本信息前言說(shuō)明8.1 增加動(dòng)態(tài)轉(zhuǎn)矩的解決方法1 . 步進(jìn)電機(jī)在低速時(shí)增加轉(zhuǎn)矩的方法1) 選擇步距角小的步進(jìn)電機(jī)2) 雙極型
2021-07-07 07:29:39
步進(jìn)電機(jī)運(yùn)行時(shí)會(huì)出現(xiàn)速度紊亂,一會(huì)正常一會(huì)超速,是什么原因,
2017-07-10 17:10:45
速度。在運(yùn)行狀態(tài)下,電機(jī)運(yùn)行平穩(wěn),但是后期開(kāi)始振動(dòng)和抖動(dòng)越來(lái)越多,最后突然停止。 我的問(wèn)題:我自己測(cè)量了電機(jī)的所有參數(shù),也許我犯了一個(gè)錯(cuò)誤。我在哪里可以找到抖動(dòng)的原因?在抖動(dòng)期間使用比正常更多的電流。可能的原因可能是:Incorect電感,死區(qū)時(shí)間長(zhǎng)度或pid設(shè)置,還是其他什么? 我聽(tīng)到了各種建議
2019-07-04 16:57:47
五、步進(jìn)電機(jī)常見(jiàn)問(wèn)題 1.步進(jìn)電機(jī)T型加速幾個(gè)參量的作用?步進(jìn)電機(jī)運(yùn)行最大步數(shù)(steps):步進(jìn)電機(jī)運(yùn)行的總步數(shù),決定了步進(jìn)電機(jī)運(yùn)行的時(shí)間。步進(jìn)電機(jī)加速階段加速度accel:該參量決定了步進(jìn)電機(jī)達(dá)
2021-07-08 09:53:16
問(wèn)題如題目所示,電機(jī)在運(yùn)行50HZ時(shí),電流就表現(xiàn)的特別明顯,當(dāng)運(yùn)行在低頻率時(shí),電流又比較平滑,是什么原因造成的呢?不平滑的部分在電流的峰值處,好像突出來(lái)的部分多余一樣,是什么原因導(dǎo)致的呢?
2017-05-03 23:27:43
setSpeed() -設(shè)置步進(jìn)電機(jī)運(yùn)行速度targetPosition -獲取步進(jìn)電機(jī)運(yùn)行目標(biāo)位置currentPosition -獲取步進(jìn)電機(jī)運(yùn)行當(dāng)前位置setCurrentPosit...
2021-06-29 09:05:03
用8825作為電機(jī)驅(qū)動(dòng)芯片,驅(qū)動(dòng)步進(jìn)電機(jī),電機(jī)能轉(zhuǎn)動(dòng),但是會(huì)發(fā)出很大的噪聲而且電機(jī)抖動(dòng)厲害,這是原理圖,有哪位大神幫忙看看是什么原因造成的?
2019-01-03 11:33:57
主要介紹無(wú)刷直流電機(jī)運(yùn)行原理、基本控制方法。目錄如下:回復(fù)帖子查看資料下載鏈接:[hide][/hide]
2021-08-05 11:11:02
如何控制步進(jìn)電機(jī)的方向?步進(jìn)電機(jī)振動(dòng)大,噪聲也很大,什么原因?為什么步進(jìn)電機(jī)通電后,電機(jī)不運(yùn)行?步進(jìn)電機(jī)抖動(dòng),不能連續(xù)運(yùn)行,怎么辦?混合式步進(jìn)電機(jī)驅(qū)動(dòng)器的脫機(jī)信號(hào)FREE一般在什么情況
2021-10-27 07:52:49
如何控制步進(jìn)電機(jī)的方向?為什么步進(jìn)電機(jī)通電后,電機(jī)不運(yùn)行?如何選擇步進(jìn)電機(jī)驅(qū)動(dòng)器供電電源?如何選擇步進(jìn)電機(jī)驅(qū)動(dòng)器供電電壓?
2021-10-28 06:41:02
步進(jìn)電機(jī)基礎(chǔ)(8.3)-步進(jìn)電機(jī)的問(wèn)題解決方案-改善暫態(tài)特性的解決方法前言基本信息前言說(shuō)明8.3 改善暫態(tài)特性的解決方法1. 利用阻尼器的改善2 . 利用驅(qū)動(dòng)電路的改善(1) 半步進(jìn)1-2相激磁
2021-07-07 06:27:00
無(wú)接線圖情況下如何連接驅(qū)動(dòng)器與步進(jìn)電機(jī)?步進(jìn)電機(jī)運(yùn)行過(guò)程中發(fā)生抖動(dòng)該怎么辦?
2021-10-27 06:45:16
無(wú)法準(zhǔn)確的計(jì)算發(fā)出脈沖導(dǎo)致步進(jìn)電機(jī)運(yùn)行距離不準(zhǔn)確。解決2:利用多片MCU產(chǎn)生PWM,自行數(shù)脈沖數(shù)。主控MCU和其利用UART等方式通訊控制調(diào)節(jié)。但是多片MCU只為產(chǎn)生PWM是否有點(diǎn)浪費(fèi)。這是我暫時(shí)想到
2017-06-12 11:16:24
二次 函數(shù)增加。這種加速方法對(duì)步進(jìn)電機(jī)運(yùn)行十分有利,因?yàn)閱?dòng)時(shí),加速度平緩, 一旦步進(jìn)電機(jī)具有一定的速度,加速度增加很快。這樣一方面使加速度平穩(wěn)過(guò)渡, 有利于提高機(jī)器的定位精度,另一方面可以縮短加速
2018-10-31 11:13:25
目前做一個(gè)項(xiàng)目遇到一個(gè)問(wèn)題,就是在實(shí)現(xiàn)步進(jìn)電機(jī)運(yùn)動(dòng)時(shí),點(diǎn)動(dòng)模式電機(jī)振動(dòng)很厲害,現(xiàn)在就一個(gè)非常強(qiáng)大的第三方庫(kù)Accelstepper進(jìn)行研究分析。官網(wǎng)的函數(shù)說(shuō)明:具體官網(wǎng)說(shuō)明見(jiàn): 中的公共成員函數(shù):...
2021-09-16 07:34:05
`無(wú)刷電機(jī)不能起動(dòng)的原因及解決方法(1)電源電壓太低,或者是降低起動(dòng)時(shí)降壓太多。是前者應(yīng)查找原因;是后者應(yīng)適當(dāng)提高起動(dòng)壓降,如用的是自耦減壓起動(dòng)器,可改變抽頭提高起動(dòng)電壓。(2)定子繞組相間短路或
2020-06-16 19:28:02
步進(jìn)電機(jī)基礎(chǔ)(8.4)-步進(jìn)電機(jī)的問(wèn)題解決方案-位置定位精度的解決方法前言基本信息前言說(shuō)明8.2 位置定位精度的解決方法1 . 驅(qū)動(dòng)電路的改善(1) 額定電壓(電流)驅(qū)動(dòng):(2) 2相激磁驅(qū)動(dòng):(3
2021-07-07 07:16:07
求高手給步進(jìn)電機(jī)子程序加個(gè)延時(shí)或者中斷步進(jìn)電機(jī)運(yùn)行一分鐘停止,或者轉(zhuǎn)3圈停止/******************************************************7步進(jìn)電機(jī)
2016-04-24 09:41:44
這是SLA7024驅(qū)動(dòng)片給我的步進(jìn)電機(jī)的脈沖,請(qǐng)各位大神幫我看看,這個(gè)波形正常嗎。我隱約覺(jué)得毛刺會(huì)影響我的電機(jī)運(yùn)行。尤其,那個(gè)下降后又突然上升的毛刺,不知道會(huì)不會(huì)被電機(jī)識(shí)別成新的脈沖。一個(gè)周期的放大圖如下:放大后看到下降沿有一個(gè)抖動(dòng),不知道會(huì)不會(huì)被電機(jī)認(rèn)為是新的脈沖
2019-04-04 05:37:11
在stm32f4上對(duì)(28byj48)步進(jìn)電機(jī)運(yùn)行介紹1.對(duì)于步進(jìn)電機(jī)的驅(qū)動(dòng)電路介紹。步進(jìn)電機(jī)不能直接的和單片機(jī)進(jìn)行連接,需要驅(qū)動(dòng)模塊來(lái)實(shí)現(xiàn)單片機(jī)對(duì)步進(jìn)電機(jī)進(jìn)行控制。對(duì)驅(qū)動(dòng)模塊的接線說(shuō)明通過(guò)對(duì)電路圖
2021-06-30 06:51:32
本文提出一種在多用途步進(jìn)電機(jī)運(yùn)動(dòng)控制系統(tǒng)中應(yīng)用現(xiàn)場(chǎng)可編程的方法。
2009-04-02 15:27:10 20
20 文中介紹了一種應(yīng)用于舞臺(tái)電腦燈控制系統(tǒng)的高性能步進(jìn)電機(jī)運(yùn)動(dòng)控制系統(tǒng),以及步進(jìn)電機(jī)的細(xì)分驅(qū)動(dòng)原理和自適應(yīng)調(diào)速算法。使用細(xì)分驅(qū)動(dòng)可以顯著地減小步進(jìn)電機(jī)的低頻振動(dòng)
2009-08-13 09:11:0019 TMC428是TRINAMIC公司最新開(kāi)發(fā)的步進(jìn)電機(jī)運(yùn)動(dòng)控制器,它可減少電機(jī)控制軟件設(shè)計(jì)的工作量,降低開(kāi)發(fā)成本。以它為核心(包括TMC236型步進(jìn)電機(jī)驅(qū)動(dòng)器)構(gòu)成的3軸步進(jìn)電機(jī)驅(qū)動(dòng)
2010-12-03 15:47:2971 電動(dòng)機(jī)噪聲大或聲音異常故障原因及解決方法
原因1:電機(jī)內(nèi)軸承間隙大
處理方法:更換軸承
原因2:電機(jī)轉(zhuǎn)子掃堂
處理方法:重新
2007-10-13 12:03:091395 按鈕式數(shù)字電位器的防抖動(dòng)和重復(fù)動(dòng)作問(wèn)題解決方法
介紹按鈕式數(shù)字電位器的防抖動(dòng)和重復(fù)動(dòng)作問(wèn)題的一種解決方法,以及對(duì)數(shù)字電位器電壓、電流、級(jí)
2009-04-05 09:26:262871 
本內(nèi)容提供了起重機(jī)運(yùn)行電機(jī)選擇小工具,希望對(duì)大家有所幫助
2011-04-18 15:47:5174 步進(jìn)電機(jī)由于體積精巧、價(jià)格低廉、運(yùn)行穩(wěn)定,在低端行業(yè)應(yīng)用廣泛,步進(jìn)電機(jī)運(yùn)動(dòng)控制實(shí)現(xiàn)全閉環(huán),是工控行業(yè)的一大難題。
2012-01-06 15:22:1114427 
講述無(wú)刷直流電機(jī)運(yùn)行原理與基本控制方法,不錯(cuò)的教程,值得學(xué)習(xí)。
2016-08-26 14:39:260 磁障轉(zhuǎn)子無(wú)刷雙饋
電機(jī)運(yùn)行特性及實(shí)驗(yàn)研究_張?jiān)?/div>
2017-01-07 17:01:100 步進(jìn)電機(jī)運(yùn)行狀態(tài)監(jiān)測(cè)系統(tǒng)概述無(wú)線傳感器網(wǎng)絡(luò)監(jiān)測(cè)系統(tǒng)的整體架構(gòu)如圖 1 所示。該系統(tǒng)主要由傳感器節(jié)點(diǎn)、網(wǎng)關(guān)、路由器、監(jiān)測(cè)管理中心構(gòu)成。
2017-08-31 14:22:1913 為何開(kāi)機(jī)時(shí)步進(jìn)電機(jī)在抖動(dòng)而不能運(yùn)行? 步進(jìn)電機(jī)只能夠由數(shù)字信號(hào)控制運(yùn)行的,當(dāng)脈沖提供給驅(qū)動(dòng)器時(shí),在過(guò)于短的時(shí)間里,控制系統(tǒng)發(fā)出的脈沖數(shù)太多,也就是脈沖頻率過(guò)高,將導(dǎo)致步進(jìn)電機(jī)堵轉(zhuǎn)。要解決這個(gè)
2017-09-11 17:11:514 會(huì)造成堵轉(zhuǎn)、失步等等。 S曲線就是為了讓電機(jī)由低速到高速有個(gè)比較平滑的過(guò)度,能順利讓步進(jìn)電機(jī)運(yùn)行到要求的狀態(tài),其實(shí)就是我們常說(shuō)的緩起緩?fù)#绷?b class="flag-6" style="color: red">電機(jī)也一樣,突然啟停電機(jī)都有非常大的沖動(dòng),如果不消除這種沖動(dòng)是無(wú)法
2017-11-27 18:36:259 雙極性步進(jìn)電機(jī)的基礎(chǔ)知識(shí) 雙極性步進(jìn)電機(jī)包含兩繞組,為了使電機(jī)運(yùn)行平穩(wěn),不斷的給這兩個(gè)線圈加以相位差90度的正弦波,步進(jìn)電機(jī)就開(kāi)始轉(zhuǎn)動(dòng)起來(lái)。 通常,步進(jìn)電機(jī)不是由模擬線性放大器驅(qū)動(dòng);而是由PWM電流
2017-12-10 11:22:172 步進(jìn)伺服電機(jī)在使用的過(guò)程中,由于機(jī)器的老化,以及使用的不當(dāng)?shù)葐?wèn)題,會(huì)讓步進(jìn)伺服電機(jī)在使用的過(guò)程中有一些小故障,電機(jī)一直抖動(dòng)就是常見(jiàn)的一種小故障,有人會(huì)問(wèn),步進(jìn)伺服電機(jī)電機(jī)開(kāi)啟之后,電機(jī)一直抖動(dòng)是什么原因造成的呢,下面我們成帥電器就給大家講講造成步進(jìn)伺服電機(jī)電機(jī)抖動(dòng)的原因,以及處理方法。
2018-02-05 10:21:2226671 多軸步進(jìn)電機(jī)插補(bǔ)控制器及多軸步進(jìn)電機(jī)運(yùn)動(dòng)控制卡控制方法
2018-04-11 10:24:4726 本文開(kāi)始介紹了步進(jìn)電機(jī)的基本原理,其次介紹了步進(jìn)電機(jī)工作效率以及使步進(jìn)電機(jī)的效率最大化的方法,最后介紹了步進(jìn)電機(jī)選型的步驟與方法。
2018-04-25 14:06:014299 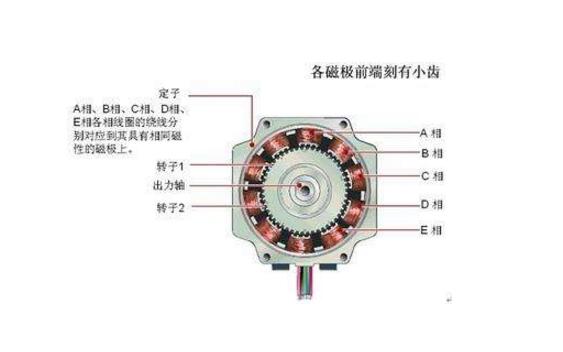
步進(jìn)電機(jī)失步的原因和對(duì)策 步進(jìn)電機(jī)可以根據(jù)脈沖數(shù)和脈沖頻率來(lái)對(duì)電機(jī)實(shí)現(xiàn)開(kāi)環(huán)控制位置和速度,是一種便宜、簡(jiǎn)單好用的控制類(lèi)電機(jī),在自動(dòng)化控制領(lǐng)域得到越來(lái)越廣泛的應(yīng)用。但由于步進(jìn)電機(jī)不是閉環(huán)控制,選型或者
2020-06-28 17:25:1512072 本文主要介紹了風(fēng)扇電機(jī)不轉(zhuǎn)原因及解決方法,另外還介紹了風(fēng)扇電機(jī)燒了的修理方法及判斷方法。
2019-07-16 14:51:2259994 空壓機(jī)在運(yùn)行的過(guò)程中,經(jīng)常會(huì)出現(xiàn)電機(jī)運(yùn)行過(guò)載的現(xiàn)象,空壓機(jī)在加載狀態(tài)時(shí),電流超過(guò)高限(34A)延時(shí)3s,則判斷為空壓機(jī)電機(jī)過(guò)載故障,觸發(fā)聲光報(bào)警,超過(guò)高高限(37A)延時(shí)3s,則聯(lián)鎖發(fā)出跳閘指令,并觸發(fā)聲光報(bào)警。那么空壓機(jī)電機(jī)過(guò)載原因與解決辦法有那些呢?
2019-07-31 11:09:2492139 額定電壓(電流)驅(qū)動(dòng):參見(jiàn)前文《步進(jìn)電機(jī)的靜態(tài)轉(zhuǎn)矩特性及測(cè)量方法》一文的下圖,從額定電壓降低電壓來(lái)驅(qū)動(dòng)步進(jìn)電機(jī),發(fā)現(xiàn)位置定位精度變差。
2019-10-07 16:17:002130 
判斷軸承以及電機(jī)運(yùn)行情況我們還可以使用視覺(jué),聽(tīng)覺(jué),觸覺(jué)
2019-10-13 03:22:005337 本文首先分析了電動(dòng)車(chē)電機(jī)聲音大的原因,其次闡述了電動(dòng)車(chē)電機(jī)聲音大解決方法,最后介紹了電動(dòng)車(chē)電機(jī)保養(yǎng)方法。
2019-10-29 10:33:5960554 其中(1)的高次諧波為主要原因。步進(jìn)電機(jī)使用方波電流驅(qū)動(dòng),必然含有大量的高次諧波,由此產(chǎn)生振動(dòng)和噪音。因此驅(qū)動(dòng)電流最好為正弦波。接近正弦波的驅(qū)動(dòng)方法有步進(jìn)電機(jī)的細(xì)分步進(jìn)驅(qū)動(dòng)。下圖為電機(jī)1/4細(xì)分、半步、整步驅(qū)動(dòng)的振動(dòng)比較,其振動(dòng)為依次增加的。
2019-12-10 09:25:348494 在使用加濕器的過(guò)程中發(fā)現(xiàn)不噴霧或噴霧小了是什么原因呢?有什么解決方法。
2020-04-04 16:09:0025495 速時(shí)間調(diào)大可以解決這個(gè)問(wèn)題。 下面精選整理網(wǎng)友對(duì)伺服電機(jī)抖動(dòng)原因進(jìn)行的分析,供大家了解借鑒: 壹 觀點(diǎn)一 當(dāng)伺服電機(jī)在零速時(shí)發(fā)生抖動(dòng),應(yīng)該是增益設(shè)高了,可減小增益值。如果啟動(dòng)時(shí)抖動(dòng)一下即報(bào)警停車(chē)了,最大可能是電機(jī)相序不正確
2020-12-22 11:54:3717401 
這種歸零方法簡(jiǎn)單,但是在電機(jī)被擋塊擋住時(shí),仍會(huì)驅(qū)動(dòng)電機(jī)執(zhí)行歸零動(dòng)作,因此不僅會(huì)對(duì)步進(jìn)電機(jī)和傳動(dòng)機(jī)構(gòu)造成傷害,還會(huì)產(chǎn)生劇烈的抖動(dòng)和較大的噪聲。
2021-03-16 10:49:396879 無(wú)刷直流電機(jī)運(yùn)行原理與基本控制(電源技術(shù)應(yīng)用 期刊)-無(wú)刷直流電機(jī)運(yùn)行原理與基本控制方法,有需要的可以參考!
2021-09-15 14:27:4162 減速機(jī)漏油是設(shè)備使用中常見(jiàn)的故障現(xiàn)象。正確分析和診斷減速機(jī)漏油的原因,并針對(duì)原因采取有效解決方法,是保證減速機(jī)正常運(yùn)行、延長(zhǎng)減速機(jī)使用壽命的關(guān)鍵。
2021-09-17 14:50:357380 近期許多顧客咨詢(xún)步進(jìn)電機(jī)安裝編碼器及步進(jìn)電機(jī)安裝難題,這兒簡(jiǎn)易做一個(gè)詳細(xì)介紹,實(shí)際請(qǐng)咨詢(xún)工程師給予解決方法!
2021-09-28 09:16:491517 如果三相電機(jī)中有一根線不通,通常表現(xiàn)為電機(jī)無(wú)法啟動(dòng)或啟動(dòng)后運(yùn)行不正常。以下是可能導(dǎo)致這種情況的原因和解決方法
2023-03-03 17:45:584425 為機(jī)器人安全限制電機(jī)運(yùn)行范圍的簡(jiǎn)單方法
2023-03-09 15:16:34662 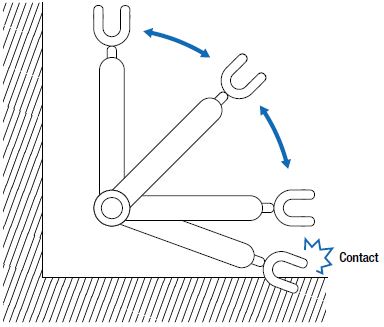
本次主要從步進(jìn)電機(jī)的結(jié)構(gòu)、工作原理、電機(jī)參數(shù)分別介紹,最后通過(guò)實(shí)驗(yàn)來(lái)實(shí)現(xiàn)步進(jìn)電機(jī)運(yùn)動(dòng)的
簡(jiǎn)單控制。本章所要實(shí)現(xiàn)的功能是:通過(guò) ULN2003 驅(qū)動(dòng)模塊控制 28BYJ48 步進(jìn)電機(jī)運(yùn)行方向及速度
2023-03-21 15:13:161 下面從速度-轉(zhuǎn)矩特性考慮要增加動(dòng)態(tài)轉(zhuǎn)矩的解決方法。增加轉(zhuǎn)矩時(shí),根據(jù)速度的高低,其解決方法各不相同。而解決方法既有電機(jī)方面的,又有驅(qū)動(dòng)電路方面的。
在低速時(shí)轉(zhuǎn)矩隨轉(zhuǎn)子齒數(shù)增加而變大。選擇
2023-03-21 15:03:520 ULN2003 驅(qū)動(dòng)模塊控制 28BYJ48 步進(jìn)
電 機(jī)運(yùn)行方向及速度,當(dāng)按下 KEY1 鍵可調(diào)節(jié)電機(jī)旋轉(zhuǎn)方向;當(dāng)按下 KEY2 鍵,電機(jī) 加速;當(dāng)按下 KEY3 鍵,電機(jī)減速。
2023-03-22 11:36:290 是利用電能轉(zhuǎn)化為機(jī)械能,從而帶動(dòng)比如像水泵之類(lèi)的設(shè)備進(jìn)行運(yùn)轉(zhuǎn)。
當(dāng)步進(jìn)電機(jī)切換一次定子繞組的激磁電流時(shí),轉(zhuǎn)子就旋轉(zhuǎn)一個(gè)固定角度即步距角。步距角一般由切換的相電流產(chǎn)生的旋轉(zhuǎn)力矩得到,所以需要每相極數(shù)是 偶數(shù)。步進(jìn)電
2023-03-23 11:47:530 步進(jìn)電機(jī)是一種感應(yīng)電機(jī),它的工作原理是利用電子電路,將直流電變成分時(shí)供電的,多相時(shí)序控制電流,用這種電流為
步進(jìn)電機(jī)供電,步進(jìn)電機(jī)才能正常工作,驅(qū)動(dòng)器就是為步進(jìn)電機(jī)分時(shí)供電的。雖然步進(jìn)電機(jī)已被
2023-03-23 10:50:161 ; 軟件需求:PCM編譯軟件,串口調(diào)試助手; 供電方式:12V電源供電給+5V電源,+5V電源輸出的5V給PCM模塊供電; 連接電路:如圖93(步進(jìn)電機(jī)正反轉(zhuǎn)實(shí)驗(yàn))
在第60個(gè)實(shí)驗(yàn)步進(jìn)電機(jī)運(yùn)行指定距離實(shí)驗(yàn)中,使用指令steprundist指令讓電機(jī)以1.5 弧度每秒的最大速度運(yùn)行3200個(gè)脈沖,如果增
2023-03-23 10:30:220 步進(jìn)電機(jī)基礎(chǔ)(8.3)-步進(jìn)電機(jī)的問(wèn)題解決方案-改善暫態(tài)特性的解決方法 前言 基本信息 前言說(shuō)明 8.3 改善暫態(tài)特性的解決方法 1. 利用阻尼器的改善 2 . 利用驅(qū)動(dòng)電路的改善 (1) 半步進(jìn)
2023-03-24 11:05:350 測(cè)量電機(jī)繞組絕緣,檢查碳刷沒(méi)發(fā)現(xiàn)明顯問(wèn)題。將電機(jī)與設(shè)備脫開(kāi)后,單機(jī)運(yùn)行,測(cè)試勵(lì)磁電流、電樞電流都在正常范圍內(nèi)。類(lèi)似的故障以前碰到過(guò)兩次,一次是測(cè)速編碼器的原因,一次是控制器主板上一個(gè)熱敏電阻虛焊,這次沒(méi)有虛焊、更換編碼器也沒(méi)有解決問(wèn)題。
2023-03-27 09:31:032892 反應(yīng)式步進(jìn)電機(jī)與混合式步進(jìn)電機(jī)的區(qū)別如下:
1、在結(jié)構(gòu)和材料上不同,混合式電機(jī)內(nèi)部具有永久磁性材料,故混合式電機(jī)有自阻(即在電機(jī)未加電的情況下有一定的自鎖力),而反應(yīng)式電機(jī)沒(méi)有自阻。
2、在運(yùn)行性能上有差別,混合式電機(jī)運(yùn)行時(shí)相對(duì)較平穩(wěn),輸出力矩相對(duì)較大,運(yùn)行聲音小。
2023-03-27 15:42:33745 三相異步電機(jī)運(yùn)行原理
(1)三相感應(yīng)電動(dòng)勢(shì)工作模型
2023-03-29 10:30:000 在一些自動(dòng)控制領(lǐng)域中,步進(jìn)電機(jī)的使用仍占著相當(dāng)大的比例,步進(jìn)電機(jī)與驅(qū)動(dòng)電路組成的開(kāi)環(huán)數(shù)控系統(tǒng),因其簡(jiǎn)單的結(jié)構(gòu)、低廉的價(jià)格和可靠的性能,目前已在很多行業(yè)中(工業(yè)自動(dòng)化、醫(yī)療自動(dòng)化、紡織自動(dòng)化等)廣泛應(yīng)用。步進(jìn)電機(jī)經(jīng)常被用于精確定位的場(chǎng)合,因而保證電機(jī)不發(fā)生失步至關(guān)重要。
2023-04-15 16:33:4412517 
減速電機(jī)現(xiàn)應(yīng)用的領(lǐng)域越來(lái)越多,日常中或許會(huì)遇到減速電機(jī)出現(xiàn)異常情況,以下我們來(lái)了解一下日常出現(xiàn)的異常原因及解決方法:
2021-12-27 15:39:13976 
電機(jī)抖動(dòng)大怎么解決 電機(jī)抖動(dòng)大是指在電機(jī)運(yùn)轉(zhuǎn)時(shí)發(fā)生了震動(dòng)或抖動(dòng)現(xiàn)象,它主要是由于電機(jī)失衡、機(jī)械系統(tǒng)不穩(wěn)定、設(shè)計(jì)誤差或部件故障等因素造成的。如果不及時(shí)解決,電機(jī)抖動(dòng)大不僅會(huì)降低設(shè)備的工作效率和壽命
2023-08-28 18:24:062932 發(fā)熱是步進(jìn)電機(jī)的一個(gè)普遍現(xiàn)象,但怎樣的發(fā)熱程度才算正常,以及如何盡量減小步進(jìn)電機(jī)發(fā)熱呢?以下是簡(jiǎn)單的分析。1、步進(jìn)電機(jī)發(fā)熱的原因1.步進(jìn)電機(jī)為什么會(huì)發(fā)熱對(duì)于各種步進(jìn)電機(jī)而言,內(nèi)部都是由鐵芯和繞組線圈
2023-10-16 08:07:42711 
用變頻器的電機(jī)為什么發(fā)抖?變頻器帶動(dòng)電機(jī)運(yùn)行時(shí)產(chǎn)生抖動(dòng)怎么處理? 首先,要了解變頻器與電機(jī)的基本知識(shí)。變頻器是一種電子傳動(dòng)設(shè)備,主要用于控制三相交流電機(jī)的轉(zhuǎn)速和輸出電壓,并具有節(jié)能和精細(xì)控制的優(yōu)點(diǎn)
2023-10-20 14:44:543817 頻率,則變頻器不輸出10-14Hz的頻率,直接跳過(guò)。帶動(dòng)電機(jī)運(yùn)行時(shí)產(chǎn)生抖動(dòng)的處理方案以三菱變頻器帶動(dòng)電機(jī)運(yùn)行時(shí)產(chǎn)生抖動(dòng)分析為例,如下:(一)、機(jī)械共振原因:機(jī)械共振
2023-10-31 08:07:33574 晶振停振的原因及解決方法 晶振是主頻組成器的核心元件之一,它能夠提供一個(gè)固定的、穩(wěn)定的振蕩頻率信號(hào),是電子元件中一種非常重要的信號(hào)源。然而,在使用過(guò)程中,晶振有時(shí)會(huì)出現(xiàn)停振的情況,導(dǎo)致整個(gè)電路的正常
2023-10-31 10:42:55817 現(xiàn)抖動(dòng)問(wèn)題,這影響了電機(jī)的運(yùn)行效果和使用壽命。本文將詳細(xì)探討直流電機(jī)制動(dòng)抖動(dòng)的原因,并提出一些建議來(lái)減輕抖動(dòng)問(wèn)題。 2. 直流電機(jī)制動(dòng)過(guò)程 直流電機(jī)的制動(dòng)一般是通過(guò)改變電機(jī)的輸入電壓或電流來(lái)實(shí)現(xiàn)的。在制動(dòng)開(kāi)始時(shí),電機(jī)的輸入
2023-11-23 10:54:09495 三相電缺相的原因及解決方法 三相電缺相是指三相供電系統(tǒng)中某一相或多相出現(xiàn)故障或中斷的情況。常見(jiàn)的缺相原因包括線路故障、設(shè)備故障、接線錯(cuò)誤、過(guò)載等,解決方法則包括檢查和修復(fù)故障線路或設(shè)備、調(diào)整電路連接
2023-12-11 17:16:185284 電機(jī)溫度過(guò)高的原因及處理方法對(duì)于保障設(shè)備的正常運(yùn)行具有重要意義。 一、電機(jī)溫度過(guò)高的原因 負(fù)載過(guò)大:電機(jī)承受的負(fù)載超過(guò)了其額定負(fù)載,導(dǎo)致電機(jī)工作時(shí)消耗的能量過(guò)多,無(wú)法及時(shí)散熱,從而造成溫度升高。 解決方法:合理
2023-12-15 11:00:072052 設(shè)定,以幫助讀者更好地理解和應(yīng)用步進(jìn)電機(jī)。 一、步進(jìn)電機(jī)的電流設(shè)定 電流是步進(jìn)電機(jī)運(yùn)行時(shí)最基本的參數(shù),它直接決定了步進(jìn)電機(jī)的運(yùn)行效果和性能。步進(jìn)電機(jī)的電流設(shè)定需要根據(jù)具體的應(yīng)用需求進(jìn)行調(diào)整,一般有兩種方法:定值電流和動(dòng)
2023-12-15 11:16:221109 將詳細(xì)解釋電機(jī)過(guò)載保護(hù)的原因以及解決方法。 電機(jī)過(guò)載保護(hù)的原因主要有以下幾點(diǎn): 1. 過(guò)載負(fù)荷:電機(jī)在運(yùn)行過(guò)程中承受的負(fù)荷超過(guò)其額定負(fù)荷。這可能是由于負(fù)載瞬時(shí)增加、負(fù)載故障或負(fù)載過(guò)程中的特殊情況引起的。 2. 相序故障:電
2023-12-25 11:32:061813 觀點(diǎn)一 當(dāng)伺服電機(jī)在零速時(shí)發(fā)生抖動(dòng),應(yīng)該是增益設(shè)高了,可減小增益值。如果啟動(dòng)時(shí)抖動(dòng)一下即報(bào)警停車(chē)了,最大可能是電機(jī)相序不正確。 觀點(diǎn)二 a.PID增益調(diào)節(jié)過(guò)大的時(shí)候,容易引起電機(jī)抖動(dòng),特別是加上
2024-01-11 08:35:34142 
影響系統(tǒng)的穩(wěn)定性和控制精度,因此有必要對(duì)步進(jìn)電機(jī)丟步的原因進(jìn)行分析,并提出相應(yīng)的解決方法。 步進(jìn)電機(jī)丟步的原因主要有以下幾個(gè)方面: 1. 負(fù)載過(guò)重:步進(jìn)電機(jī)在正常運(yùn)行時(shí)需要克服一定的負(fù)載,但如果負(fù)載過(guò)重,超過(guò)了步
2024-02-01 16:32:47706 三相電缺相的原因及解決方法 三相電缺相是指三相電路中某一相電流缺失的現(xiàn)象,通常會(huì)導(dǎo)致電機(jī)運(yùn)行不正常、設(shè)備損壞等問(wèn)題。下面將詳細(xì)介紹三相電缺相的原因及解決方法。 原因: 1.電源故障:電源供應(yīng)系統(tǒng)
2024-02-06 10:04:561208 電機(jī)是現(xiàn)代工業(yè)中最常見(jiàn)、最重要的動(dòng)力裝置之一,廣泛應(yīng)用于各行各業(yè)。而作為電機(jī)運(yùn)行特性的一個(gè)重要參數(shù),功率的計(jì)算與分析對(duì)于電機(jī)的設(shè)計(jì)、運(yùn)行和維護(hù)具有重要意義。本文將介紹電機(jī)運(yùn)行功率的計(jì)算方法
2024-02-20 14:22:20332 常見(jiàn)的問(wèn)題及維護(hù)方法,幫助讀者更好地使用步進(jìn)電機(jī)。 ? ? ? 一、步進(jìn)電機(jī)常見(jiàn)問(wèn)題 ? ? ? 1. 步進(jìn)電機(jī)運(yùn)轉(zhuǎn)不正常 ? ? ? 步進(jìn)電機(jī)運(yùn)轉(zhuǎn)不正常可能是由于驅(qū)動(dòng)器參數(shù)設(shè)置不當(dāng)、電機(jī)與驅(qū)動(dòng)器連接不良、電機(jī)本身故障等原因引起的。為了解
2024-03-17 08:36:1038 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論