 電子發(fā)燒友App
電子發(fā)燒友App


西門子PTO運動控制
西門子PLC運動控制的3種控制方式:
S7-1200PLC運動控制根據(jù)連接驅(qū)動方式不同,分為了3種控制方式:
1、通信:可以對速度、轉(zhuǎn)矩、位置進(jìn)行控制;
使用Profidrive驅(qū)動控制協(xié)議,它是PI國際組織(PROFIBUSand PROFINET International)推出的一種標(biāo)準(zhǔn)驅(qū)動控制協(xié)議,用于控制器與驅(qū)動器之間的數(shù)據(jù)交換;
(PROFIdrive是在Profibus和Profinet基礎(chǔ)上開發(fā)的一種驅(qū)動技術(shù)和應(yīng)用行規(guī),它為驅(qū)動器產(chǎn)品提供了一致的規(guī)范,通過認(rèn)證后,產(chǎn)品可以方便地接入Profibus和Profinet網(wǎng)絡(luò)。)
S7-1200/1500PLC通過基于Profibus/Profinet的Profidrive的方式與支持Profidrive的驅(qū)動器連接,進(jìn)行運動控制。
S7-1200最多帶16個從站(如西門子V90),S7-1500PLC則是根據(jù)PLC型號,PLC型號不同,所帶的從站個數(shù)也不同。
PTO
2、PTO:脈沖傳輸出;可以對:速度、位置進(jìn)行控制,是目前所用最多的運動控制方式。
S7-1200PLC通過發(fā)送PTO脈沖的方式控制驅(qū)動器,可以是脈沖+方向〈大部分)、A/B正交、也可以是正/反脈沖的方式。S7-1200最多只能通過PTO控制4個驅(qū)動,不能進(jìn)行擴(kuò)展;S7-1500雖然也有PTO功能,但比較簡單,大多用PROFIdrive方式。
模擬量
3、模擬量,可以對:速度轉(zhuǎn)矩進(jìn)行控制。
S7-1200/1500PLC通過輸出模擬量來控制驅(qū)動器,可以控制驅(qū)動對象的轉(zhuǎn)矩和速度。
以上便是對3種運動控制的一個簡單介紹。
PTO控制組態(tài)的運用
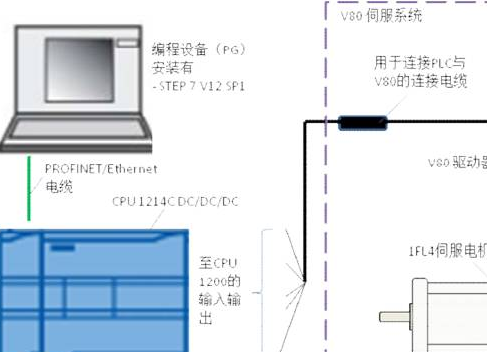
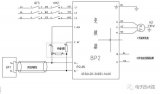
以S7-1200PLC為例,使用PTO脈沖傳輸出進(jìn)行運動控制,具體為TO(博圖中的工藝對象組態(tài))+MC指令(圖1-1)

圖1-1
使用PTO(脈沖串輸出)控制方式,S7-1200最多只能通過PTO控制4個驅(qū)動(圖1-2)

圖1-2
其中,PLC固件版本在V4.0及以上的,用戶可以靈活定義PTO0~PTO3這4個軸的DO點分配。
下面,我們打開博圖開始工藝組態(tài):
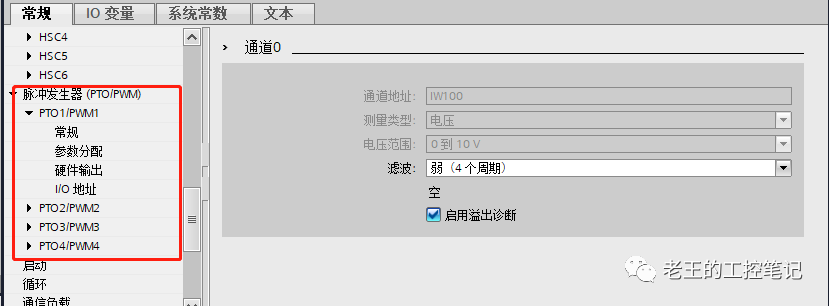
圖1-1
進(jìn)入設(shè)備視圖,在CPU屬性-常規(guī)中,點擊打開“脈沖發(fā)生器(PTO/PWM)”。
圖1-1,脈沖發(fā)生器只有4個,按照順序從PTO1/PWM1開始用起。
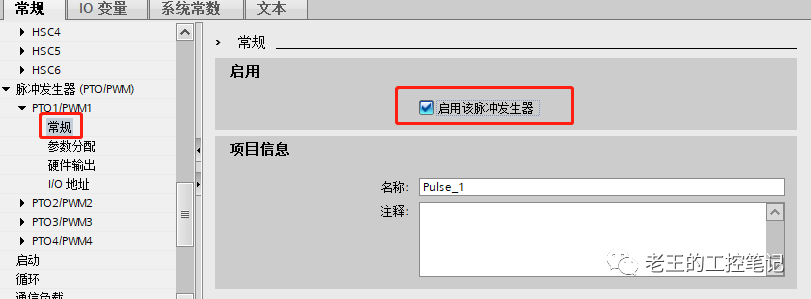
圖1-2
PTO1/PWM1中包含4項參數(shù)設(shè)置,點擊常規(guī),勾選“啟用該脈沖發(fā)生器”。
參數(shù)分配:圖1-3
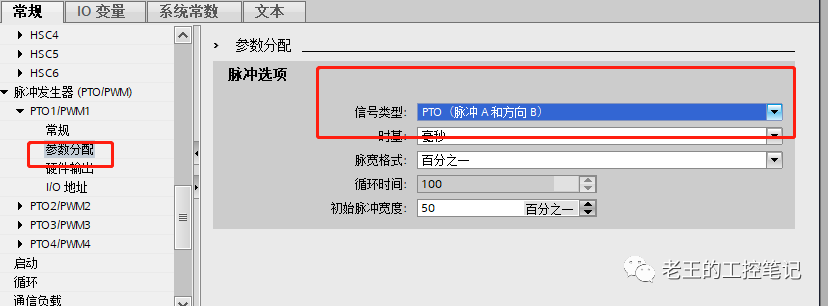
圖1-3
硬件輸出:
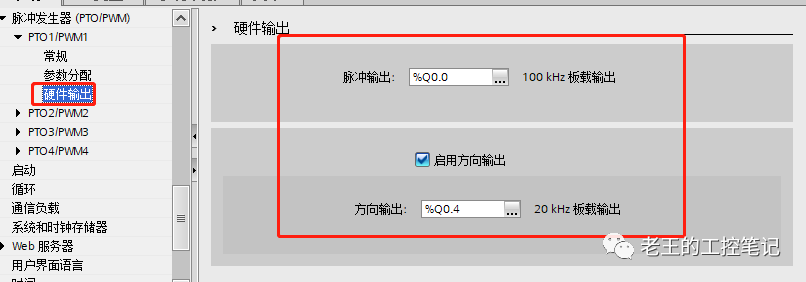
圖1-4
硬件輸出,有2項內(nèi)容要選擇,脈沖輸出和方向輸出;
其中,脈沖輸出一定是100HZ板載輸出,如果對于可用脈沖輸出點不熟悉可以看上圖1-2;方向輸出則不用這么高,選擇普通的20KHZ板載輸出即可。
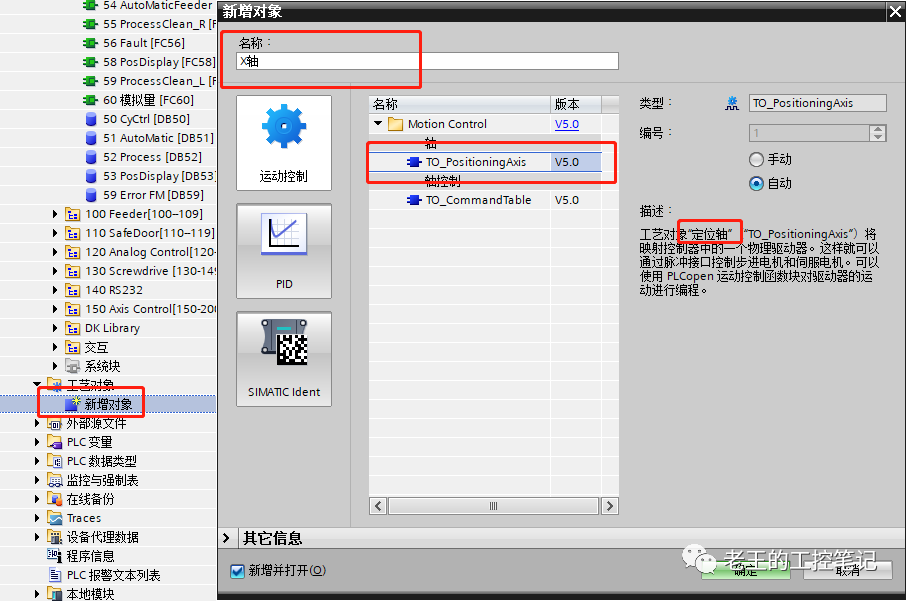
圖1-5
硬件組態(tài)-脈沖發(fā)生器設(shè)置完成,在左側(cè)的項目樹中,雙擊工藝對象中的新增對象,在彈窗中選擇“定位軸”,可在名稱處修改當(dāng)前軸名稱。
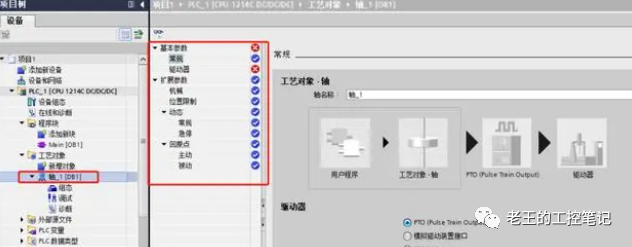
圖1-6
系統(tǒng)會為我們新建的軸_1分配一個背景DB1,在圖1-6右側(cè)便是我們需要設(shè)置的項目;
圖1-6中,已經(jīng)顯示了基本參數(shù)中常規(guī)的設(shè)置:
驅(qū)動器選擇-PTO(PulseTrain Output)
測量單位-位置單位:mm(國內(nèi)一般默認(rèn)都為mm)
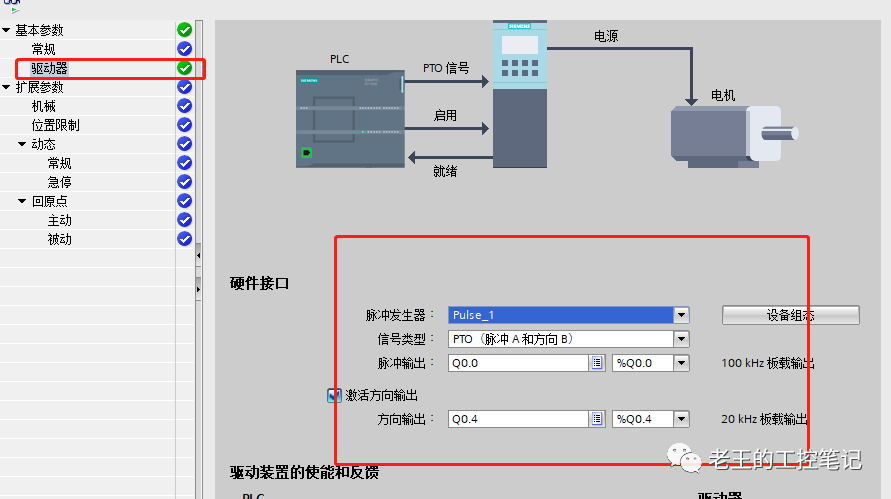
圖1-7
基本參數(shù)中的驅(qū)動器設(shè)置:
硬件接口,我們需要點擊脈沖發(fā)生器一欄的倒三角圖標(biāo),選擇Pulse_1,之后顯示的信息便是先前在CPU屬性中設(shè)置的脈沖發(fā)生器。

圖1-8
擴(kuò)展參數(shù)中的機(jī)械:
電機(jī)每轉(zhuǎn)的脈沖數(shù)以及電機(jī)每轉(zhuǎn)的負(fù)載位移可在電機(jī)銘牌上查找。
所允許的旋轉(zhuǎn)方向,選擇雙向,即正轉(zhuǎn)反轉(zhuǎn)。
反向信號一般不勾選。
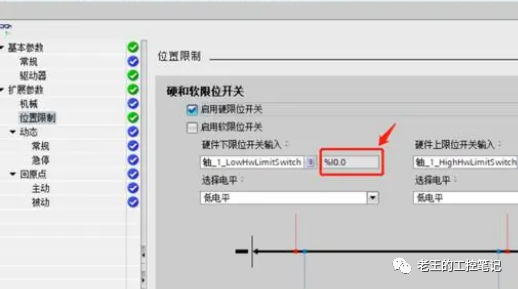
圖1-9
擴(kuò)展參數(shù)中的位置限制:
這個設(shè)置很重要,也是常出錯的地方。
位置限制有2個,一個是硬件限位,一個是軟限位;
勾選硬限位,便是啟用外部的限位開關(guān);如圖1-9,先勾選“啟用硬限位開關(guān)”,然后選擇“硬件下限位開關(guān)輸入”,可以直接在下列輸入框中填寫地址,地址選擇完成,需要點擊圖1-9紅框標(biāo)注的區(qū)域,由系統(tǒng)分配左側(cè)輸入框中的硬件地址。
軟限位如果要使用,則需要圖1-9下方的軟限位開關(guān)上/下限位置,需要填寫測量好的距離。
當(dāng)然,大部分還是使用硬限位。

圖1-10
擴(kuò)展參數(shù)中動態(tài)里的常規(guī):
速度限值得單位要和基本參數(shù)中常規(guī)里的位置單位一致;
最大轉(zhuǎn)速根據(jù)實際負(fù)載進(jìn)行設(shè)置;
加速時間和減速時間也需要根據(jù)實際負(fù)載設(shè)置,不過在空載或是輕載的情況下,可以將時間設(shè)置短一點;
下面有個激活加加速度限值,暫時沒勾選,可以看到當(dāng)前的加速度/減速度的曲線是矩形的,對于設(shè)備的影響是:瞬間啟動瞬間停止,啟動/停止過程幾乎沒得緩沖,長期使用對應(yīng)硬件磨損較高。
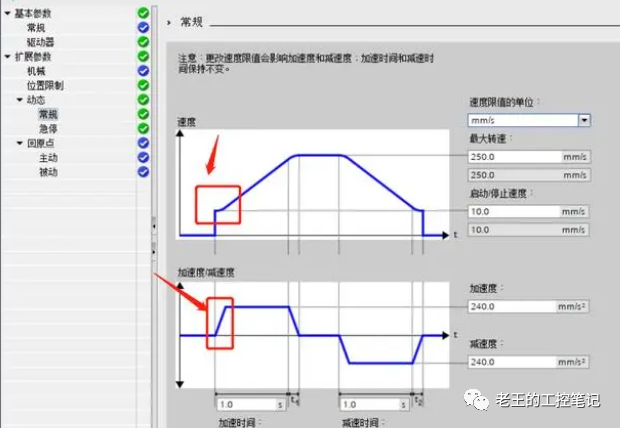
圖1-11
勾選了“激活加加速度限值”,可以看到圖中的曲線有了一個緩沖時間,是對硬件的一個保護(hù)。
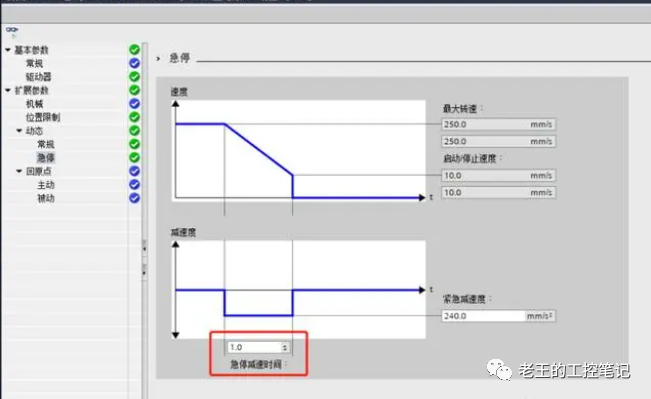
圖1-12
急停的減速時間可以按實際負(fù)載大小往小了設(shè);
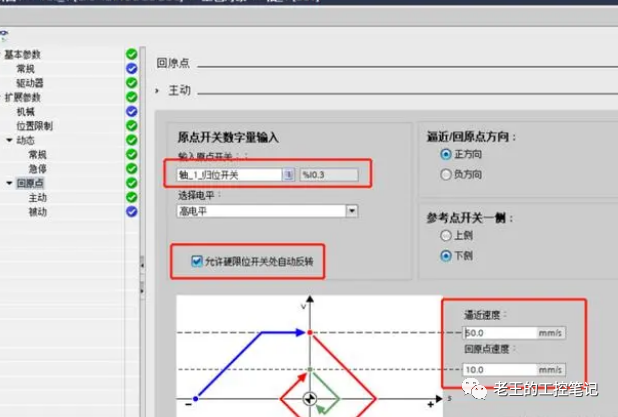
圖1-13
回原點:
輸入原點開關(guān)方法和位置限制設(shè)置一樣,注意的是需要勾選“允許硬限位開關(guān)處自動反轉(zhuǎn)”;這是為了防止設(shè)置在回原點是誤觸碰了限位開關(guān)從而停止打斷回原點過程,所以需要勾選。
右側(cè)可以設(shè)置逼近/回原點的方向和參考點開關(guān)的方位。
逼近速度:是沒有觸碰到原點的接近開關(guān)時,設(shè)備去找這個原點的速度,速度可以設(shè)置快點,但是不能超過動態(tài)常規(guī)里的最大轉(zhuǎn)速,上面我們設(shè)置的是250,那么這里的逼近速度最大只可以設(shè)置到250,超過會報錯提示。
(建議逼近速度不用設(shè)置太快,特別是帶有負(fù)載的情況下)
回原點速度,是設(shè)備在經(jīng)過原點接近開關(guān)后,在小范圍內(nèi)確定原點,所以速度設(shè)置慢點。
以上就是PTO的一個工藝對象組態(tài)設(shè)置。
審核編輯:湯梓紅











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論