28BYJ-48步進(jìn)電動(dòng)機(jī)的驅(qū)動(dòng)方式是怎樣的?
2021-11-04 07:51:30
5G8713步進(jìn)電動(dòng)機(jī)控制電路
2019-11-05 07:24:56
步進(jìn)電動(dòng)機(jī)驅(qū)動(dòng)電路
2008-08-23 23:49:35
脈沖信號(hào)轉(zhuǎn)換控制的方法將脈沖電信號(hào)變換成相應(yīng)的角位移或線位移。因此步進(jìn)電動(dòng)機(jī)也被稱(chēng)為脈沖電動(dòng)機(jī)(Pulse Motor)。2、步進(jìn)電動(dòng)機(jī)不能直接使用通常的直流或交流電源來(lái)驅(qū)動(dòng),而是需要使用專(zhuān)門(mén)的步進(jìn)
2021-06-29 07:40:00
步進(jìn)電動(dòng)機(jī)步進(jìn)機(jī)將脈沖信號(hào)轉(zhuǎn)換為角位移或線位移。主要要求:動(dòng)作靈敏、準(zhǔn)確、重量輕、體積小、運(yùn)行可靠、耗電少等。步進(jìn)電動(dòng)機(jī)的結(jié)構(gòu)與基本工作原理機(jī)理:步進(jìn)電機(jī)是利用電磁鐵原理,將脈沖信號(hào) &
2008-11-19 23:54:15
步進(jìn)電動(dòng)機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu),當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(這個(gè)角度叫做歩距角)。我們可以通過(guò)控制脈沖的個(gè)數(shù)來(lái)控制電機(jī)的角位移量
2021-08-31 07:53:31
步進(jìn)電動(dòng)機(jī)的工作原理
2008-11-20 01:09:21
步進(jìn)電動(dòng)機(jī)的結(jié)構(gòu)與原理
2019-10-08 14:28:36
請(qǐng)教各位高手,步進(jìn)電動(dòng)機(jī)的細(xì)分程序
2013-03-20 21:42:33
步進(jìn)電機(jī)步進(jìn)電動(dòng)機(jī)也叫脈沖電機(jī)。步進(jìn)電機(jī)無(wú)法直接接到直流或交流電源上工作,必須使用專(zhuān)用的驅(qū)動(dòng)電源步進(jìn)電機(jī)驅(qū)動(dòng)器。步進(jìn)電機(jī)是一種感應(yīng)電機(jī),它的工作原理是利用電子電路,將直流電變成分時(shí)供電的,多相時(shí)序
2021-07-08 07:31:02
為什么軟啟動(dòng)器復(fù)位,電動(dòng)機(jī)才能啟動(dòng)?
2021-01-29 06:23:03
電動(dòng)機(jī)具有哪幾種工作模式?
2021-10-19 08:31:54
電動(dòng)機(jī)(俗稱(chēng)“馬達(dá)”)是指依據(jù)電磁感應(yīng)定律實(shí)現(xiàn)電能轉(zhuǎn)換的一種電磁裝置。在電路中用字母M表示,它的主要作用是產(chǎn)生驅(qū)動(dòng)轉(zhuǎn)矩,可作為用電設(shè)備的動(dòng)力源。電動(dòng)機(jī)主要包括一個(gè)用以產(chǎn)生磁場(chǎng)的電磁鐵繞組或分布的定子
2018-10-11 11:06:09
在工業(yè)控制領(lǐng)域,電動(dòng)機(jī)是一個(gè)重要的研究方向,發(fā)電廠60%的能量都去驅(qū)動(dòng)電動(dòng)機(jī)來(lái)為人類(lèi)服務(wù),可見(jiàn)電機(jī)的控制在工業(yè)以及軍事方面的重要性。電動(dòng)機(jī)分為直流電機(jī)和交流電機(jī),而交流電機(jī)包括同步交流電機(jī)和異步
2021-09-06 06:08:45
的控制原理和采用單片機(jī)進(jìn)行控制的方法,并給出了單片機(jī)控制電路和軟件。同,還介紹了用于電動(dòng)機(jī)驅(qū)動(dòng)的常用功率元器件的特性和驅(qū)動(dòng)電路,用于電動(dòng)機(jī)閉環(huán)控制的常用傳感器的理以及與單片機(jī)的接口電路,用于電動(dòng)機(jī)優(yōu)化控制的數(shù)字PID與數(shù)字濾波的算法和編程。
2023-09-22 07:05:56
電動(dòng)機(jī)應(yīng)用廣泛,下面為您揭曉目前電動(dòng)機(jī)重要的七大應(yīng)用領(lǐng)域:
2021-02-05 06:27:39
眾所周知,電動(dòng)機(jī)是重工業(yè)不可或缺的生產(chǎn)設(shè)備之一,現(xiàn)在國(guó)家提倡電動(dòng)機(jī)需節(jié)能、環(huán)保、高效,那么如何能在電動(dòng)機(jī)生產(chǎn)過(guò)程中降低能耗、節(jié)約電能、發(fā)揮其生產(chǎn)力呢?下面小編跟大家來(lái)簡(jiǎn)述一下電動(dòng)機(jī)的節(jié)能措施。
2021-01-29 07:34:49
電動(dòng)機(jī)包括六個(gè)部分,如下圖所示: 電樞或轉(zhuǎn)子整流子電刷軸場(chǎng)磁鐵某種類(lèi)型的直流電源電動(dòng)機(jī)的工作方式不外乎與磁鐵和磁性相關(guān):電動(dòng)機(jī)使用磁鐵產(chǎn)生運(yùn)動(dòng)。如果您曾經(jīng)玩過(guò)磁鐵的話,就知道所有磁鐵都具有以下基本法
2012-10-10 23:17:35
描述:A3981/A4980 是一款可編程的微步電動(dòng)機(jī)驅(qū)動(dòng)器,帶有內(nèi)置轉(zhuǎn)換器,易于操作。它采用單芯片解決方案,能夠以全步進(jìn)、半步進(jìn)、四分之一及十六分之一步進(jìn)模式驅(qū)動(dòng)雙極步進(jìn)電動(dòng)機(jī),工作電壓和電流可達(dá)
2021-09-13 07:38:46
、步進(jìn)電動(dòng)機(jī)、無(wú)刷直流電動(dòng)機(jī)、交流永磁同步伺服電動(dòng)機(jī)的控制原理和采用單片機(jī)進(jìn)行控制的方法,并給出了單片機(jī)控制電路和軟件。同時(shí),還介紹了用于電動(dòng)機(jī)驅(qū)動(dòng)的常用功率元器件的特性和驅(qū)動(dòng)電路,用于電動(dòng)機(jī)
2018-04-24 17:51:25
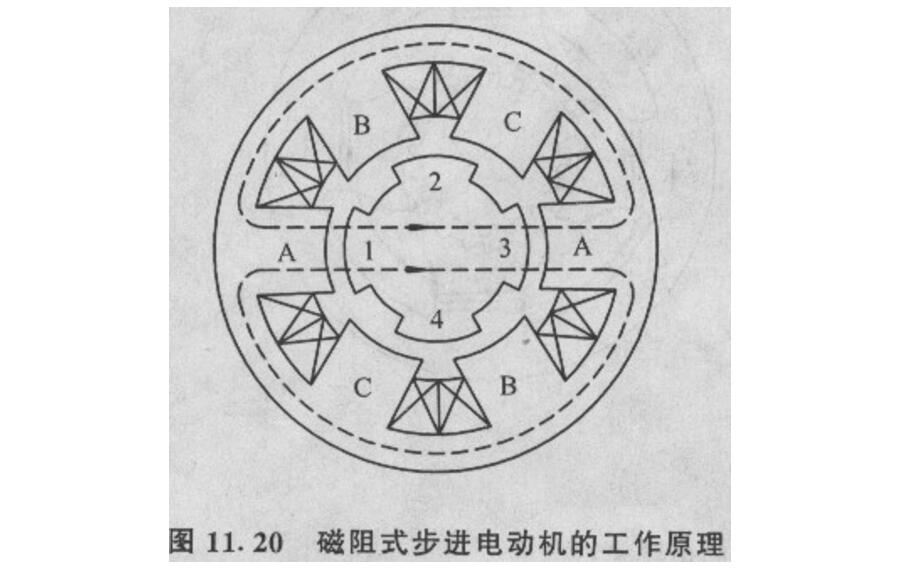
圖7-20 (a)三相反應(yīng)式步進(jìn)電動(dòng)機(jī)工作原理圖A 相通電,A 方向的磁通經(jīng)轉(zhuǎn)子形成閉合回路。若轉(zhuǎn)子和磁場(chǎng)軸線方向原有一定角度,則在磁場(chǎng)的作用下,轉(zhuǎn)子被磁化,吸引轉(zhuǎn)子,使轉(zhuǎn)子的位置力圖使通電相磁路
2008-11-19 23:44:41
通常我們學(xué)習(xí)電機(jī)的時(shí)候,都是理論分析與公式推導(dǎo),卻不知道常見(jiàn)的電機(jī)是怎么動(dòng)態(tài)工作的,接下來(lái)了解一下電機(jī)轉(zhuǎn)起來(lái)后的效果,加深對(duì)電機(jī)知識(shí)的理解。1、永磁電機(jī)2、直流電動(dòng)機(jī)3、量子磁電機(jī)4、單相感應(yīng)電動(dòng)機(jī)5、步進(jìn)電機(jī)的工作原理6、平衡電機(jī)7、電動(dòng)小馬達(dá)8、產(chǎn)生電流的原理9、三相定子
2018-07-26 08:50:26
他們都以同樣的同步轉(zhuǎn)速運(yùn)轉(zhuǎn),如果增加負(fù)荷,角度也隨之增加。如果突然讓電動(dòng)機(jī)高負(fù)荷運(yùn)轉(zhuǎn),轉(zhuǎn)子和定子的電極會(huì)脫離同步狀態(tài),電動(dòng)機(jī)停止工作。這些電動(dòng)機(jī)并不是自啟動(dòng)的,他們需要一個(gè)啟動(dòng)機(jī)制,大多數(shù)同步電動(dòng)機(jī)
2023-03-02 10:25:39
和電動(dòng)機(jī)旁。 異地控制電動(dòng)機(jī)時(shí),只需要注意,停止按鈕全部串聯(lián),啟動(dòng)按鈕全部并聯(lián)即可。電動(dòng)機(jī)的順序啟動(dòng)以?xún)膳_(tái)電動(dòng)機(jī)M1,M2順序啟動(dòng)為例。要求M2在M1啟動(dòng)后才能啟動(dòng),M1可以單獨(dú)啟動(dòng)。 其中,按鈕SB1
2018-10-30 18:19:25
同步電動(dòng)機(jī)與異步電動(dòng)機(jī)的轉(zhuǎn)速有何不同?同步電動(dòng)機(jī)與異步電動(dòng)機(jī)轉(zhuǎn)動(dòng)的原理有何不同?同步電動(dòng)機(jī)與異步電動(dòng)機(jī)轉(zhuǎn)動(dòng)的外部特性和應(yīng)用上的區(qū)別在哪?
2021-07-29 08:02:14
我是在做步進(jìn)電機(jī)轉(zhuǎn)動(dòng)實(shí)驗(yàn),如果9013中E接地,B接電阻(電阻和74hc08相連),C接電動(dòng)機(jī)的某相,電動(dòng)機(jī)再接電源,這時(shí)電源為什么會(huì)短路啊
2017-10-15 08:23:03
基于單片機(jī)的步進(jìn)電動(dòng)機(jī)技術(shù)研究
2012-06-20 14:37:19
在本文中,您將學(xué)習(xí)如何使用L298N電動(dòng)機(jī)驅(qū)動(dòng)器控制步進(jìn)電動(dòng)機(jī)。 該驅(qū)動(dòng)板通常用于控制直流電動(dòng)機(jī),但它還是控制步進(jìn)電動(dòng)機(jī)的廉價(jià)替代品! 它可以控制大多數(shù)步進(jìn)電機(jī)(例如NEMA 17)的速度和旋轉(zhuǎn)方向
2021-07-08 09:06:09
本文以Samsung公司S3C2410X CPU為例,探討如何為使用嵌入式Linux的工業(yè)控制器開(kāi)發(fā)字符設(shè)備驅(qū)動(dòng)程序來(lái)驅(qū)動(dòng)步進(jìn)電動(dòng)機(jī)。
2021-04-26 06:46:42
用單片機(jī)I/O口驅(qū)動(dòng)步進(jìn)電動(dòng)機(jī)一、實(shí)驗(yàn)?zāi)康亩?shí)驗(yàn)內(nèi)容三、實(shí)驗(yàn)步驟四、C代碼如下五、實(shí)驗(yàn)結(jié)果六、實(shí)驗(yàn)體會(huì)一、實(shí)驗(yàn)?zāi)康倪M(jìn)一步掌握單片機(jī)應(yīng)用系統(tǒng)的軟硬件設(shè)計(jì)方法熟悉步進(jìn)電動(dòng)機(jī)的工作原理和驅(qū)動(dòng)程序的編寫(xiě)
2021-12-13 06:13:30
本文小編給大家總結(jié)下電動(dòng)機(jī)幾個(gè)的檢查工作,以保證電動(dòng)機(jī)的正常運(yùn)轉(zhuǎn),防止燒毀,延長(zhǎng)電動(dòng)機(jī)的工作壽命。
2021-01-21 06:58:46
轉(zhuǎn)自嵌入式單片機(jī)之家步進(jìn)電動(dòng)機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu),當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(這個(gè)角度叫做歩距角)。我們可以通過(guò)控制脈沖的個(gè)數(shù)
2021-08-31 07:39:02
及時(shí)調(diào)整負(fù)載,避免電動(dòng)機(jī)長(zhǎng)期過(guò)載工作。 三相電源中只需有一相斷路,就會(huì)致使電動(dòng)機(jī)斷相工作,如決斷相工作時(shí)間過(guò)長(zhǎng),將會(huì)燒壞電動(dòng)機(jī)。因此,耍常常查看電源電路。 電動(dòng)機(jī)內(nèi)油泥、塵土太多,電動(dòng)機(jī)通風(fēng)遲堵塞都會(huì)
2015-08-15 14:59:40
感應(yīng)電動(dòng)機(jī)基本結(jié)構(gòu)感應(yīng)電動(dòng)機(jī)氣隙旋轉(zhuǎn)磁場(chǎng)和感應(yīng)電動(dòng)勢(shì)感應(yīng)電動(dòng)機(jī)的工作原理三相交流感應(yīng)異步電動(dòng)機(jī)
2021-02-02 07:58:21
的驅(qū)動(dòng)電路,然后在連接電動(dòng)機(jī)。還有一種方案是用PLC作為控制器,來(lái)發(fā)送脈沖,控制步進(jìn)電動(dòng)機(jī)的運(yùn)行。項(xiàng)目還在嘗試中,大家有做過(guò)的嗎,能給點(diǎn)意見(jiàn)嗎
2014-05-03 19:09:58
實(shí)現(xiàn)對(duì)三相永磁同步伺服電動(dòng)機(jī)的電流控制。根據(jù)其工作原理、驅(qū)動(dòng)電流波形和控制方式的不同,它又可分為兩種伺服系統(tǒng): (1)矩形波電流驅(qū)動(dòng)的永磁交流伺服系統(tǒng)。 (2)正弦波電流驅(qū)動(dòng)的永磁交流伺服系統(tǒng)。 采用
2015-01-23 14:44:31
直流伺服電機(jī)與普通他勵(lì)直流電動(dòng)機(jī)有何不同?電磁式直流伺服電機(jī)的工作原理是什么?直流伺服電動(dòng)機(jī)的機(jī)械特性是什么?永磁交流伺服電動(dòng)機(jī)同直流伺服電動(dòng)機(jī)比較,主要優(yōu)點(diǎn)有哪些?
2021-06-28 06:10:39
永磁無(wú)刷電動(dòng)機(jī)可以看做是一臺(tái)用電子換向裝置取代機(jī)械換向的直流電動(dòng)機(jī),直流無(wú)刷電動(dòng)機(jī)主要由永磁電動(dòng)機(jī)本體、轉(zhuǎn)子位置傳感器和電子換向電路組成。
2019-10-16 09:00:50
關(guān)于汽車(chē)中的電動(dòng)機(jī)應(yīng)用,英國(guó)和法國(guó)已經(jīng)制定了禁止內(nèi)燃機(jī)(ICE)的限期,中國(guó)也在研究何時(shí)禁止內(nèi)燃機(jī)車(chē)。沃爾沃已經(jīng)宣布其新車(chē)將于2019年開(kāi)始使用電動(dòng)驅(qū)動(dòng)。
2019-07-19 07:20:25
無(wú)刷電動(dòng)機(jī)驅(qū)動(dòng)電路使用 drv10866驅(qū)動(dòng)芯片驅(qū)動(dòng)一個(gè)小型無(wú)刷直流電機(jī)風(fēng)扇,無(wú)需使用任何位置傳感器。無(wú)刷直流電動(dòng)機(jī)風(fēng)扇的轉(zhuǎn)速可以平穩(wěn)地改變,而不需要像普通交流風(fēng)扇那樣通常的步驟。直流無(wú)刷電動(dòng)機(jī)驅(qū)動(dòng)
2022-03-07 16:06:37
污濁空氣。電動(dòng)機(jī)本體是根據(jù)電機(jī)電路方案來(lái)確定,常用二相橋式換相驅(qū)動(dòng)電路。內(nèi)定子繞組可以較方便地 繞在鐵心齒上。電機(jī)做成外轉(zhuǎn)子式結(jié)構(gòu),定子和定子繞組放在轉(zhuǎn)子內(nèi)部。換相驅(qū)動(dòng)電路采用專(zhuān)用集成電路(ASIC
2016-08-08 13:37:48
本帖最后由 峩、那么可笑 于 2014-12-25 14:12 編輯
本次設(shè)計(jì)中采用的 DSP 控制步進(jìn)電動(dòng)機(jī)的原理和方法可以用來(lái)進(jìn)一步的開(kāi)發(fā)基于DSP 的多電動(dòng)機(jī)控制系統(tǒng),設(shè)計(jì)中 DSP
2014-11-05 14:39:34
本次設(shè)計(jì)中采用的 DSP 控制步進(jìn)電動(dòng)機(jī)的原理和方法可以用來(lái)進(jìn)一步的開(kāi)發(fā)基于DSP 的多電動(dòng)機(jī)控制系統(tǒng),設(shè)計(jì)中 DSP 的外圍電路例如復(fù)位電路,外部存儲(chǔ)器,JTAG仿真等等設(shè)計(jì)可以直接使用在多電動(dòng)機(jī)
2014-10-30 13:57:14
步進(jìn)電動(dòng)機(jī)的工作原理
2019-09-24 05:37:00
步進(jìn)電動(dòng)機(jī)的微機(jī)控制電路
2019-09-12 09:12:20
直流有刷電動(dòng)機(jī)驅(qū)動(dòng)電路原理圖
2019-09-29 01:49:41
電動(dòng)機(jī)是設(shè)備的動(dòng)力源,如果設(shè)備電動(dòng)機(jī)不能工作,整個(gè)設(shè)備就無(wú)法工作。電動(dòng)機(jī)使用的好壞,和設(shè)備的維護(hù)有關(guān),要保證電動(dòng)機(jī)的散熱系統(tǒng),保證電動(dòng)機(jī)的工作環(huán)境,定時(shí)對(duì)電動(dòng)機(jī)進(jìn)行清潔,定時(shí)保養(yǎng),出現(xiàn)異常及時(shí)
2018-09-07 15:56:54
步進(jìn)電動(dòng)機(jī)概述步進(jìn)電動(dòng)機(jī)工作原理及線性解析步進(jìn)電動(dòng)機(jī)的研究設(shè)計(jì)計(jì)算方法步進(jìn)電動(dòng)機(jī)動(dòng)態(tài)特性的基礎(chǔ)理論步進(jìn)電動(dòng)機(jī)的驅(qū)動(dòng)步進(jìn)電動(dòng)機(jī)的環(huán)境分配器步進(jìn)
2007-11-16 23:32:54 0
0 步進(jìn)電動(dòng)機(jī)概述步進(jìn)電動(dòng)機(jī)工作原理及線性解析步進(jìn)電動(dòng)機(jī)的研究設(shè)計(jì)計(jì)算方法步進(jìn)電動(dòng)機(jī)動(dòng)態(tài)特性的基礎(chǔ)理論步進(jìn)電動(dòng)機(jī)的驅(qū)動(dòng)步進(jìn)電動(dòng)機(jī)的環(huán)境分配器步進(jìn)電
2007-11-16 23:33:276 步進(jìn)電動(dòng)機(jī)概述步進(jìn)電動(dòng)機(jī)工作原理及線性解析步進(jìn)電動(dòng)機(jī)的研究設(shè)計(jì)計(jì)算方法步進(jìn)電動(dòng)機(jī)動(dòng)態(tài)特性的基礎(chǔ)理論步進(jìn)電動(dòng)機(jī)的驅(qū)動(dòng)步進(jìn)電動(dòng)機(jī)的環(huán)境分配器步進(jìn)電
2007-11-16 23:33:4823 步進(jìn)電動(dòng)機(jī)概述步進(jìn)電動(dòng)機(jī)工作原理及線性解析步進(jìn)電動(dòng)機(jī)的研究設(shè)計(jì)計(jì)算方法步進(jìn)電動(dòng)機(jī)動(dòng)態(tài)特性的基礎(chǔ)理論步進(jìn)電動(dòng)機(jī)的驅(qū)動(dòng)步進(jìn)電動(dòng)機(jī)的環(huán)境分配器步進(jìn)電
2007-11-16 23:34:573 步進(jìn)電動(dòng)機(jī)概述步進(jìn)電動(dòng)機(jī)工作原理及線性解析步進(jìn)電動(dòng)機(jī)的研究設(shè)計(jì)計(jì)算方法步進(jìn)電動(dòng)機(jī)動(dòng)態(tài)特性的基礎(chǔ)理論步進(jìn)電動(dòng)機(jī)的驅(qū)動(dòng)步進(jìn)電動(dòng)機(jī)的環(huán)境分配器步進(jìn)電
2007-11-16 23:35:427 步進(jìn)電動(dòng)機(jī)概述步進(jìn)電動(dòng)機(jī)工作原理及線性解析步進(jìn)電動(dòng)機(jī)的研究設(shè)計(jì)計(jì)算方法步進(jìn)電動(dòng)機(jī)動(dòng)態(tài)特性的基礎(chǔ)理論步進(jìn)電動(dòng)機(jī)的驅(qū)動(dòng)步進(jìn)電動(dòng)機(jī)的環(huán)境分配器
步
2007-11-16 23:36:296 步進(jìn)電動(dòng)機(jī)概述步進(jìn)電動(dòng)機(jī)工作原理及線性解析步進(jìn)電動(dòng)機(jī)的研究設(shè)計(jì)計(jì)算方法步進(jìn)電動(dòng)機(jī)動(dòng)態(tài)特性的基礎(chǔ)理論步進(jìn)電動(dòng)機(jī)的驅(qū)動(dòng)步進(jìn)電動(dòng)機(jī)的環(huán)境分配器步進(jìn)
2007-11-16 23:37:132 步進(jìn)電動(dòng)機(jī)概述步進(jìn)電動(dòng)機(jī)工作原理及線性解析步進(jìn)電動(dòng)機(jī)的研究設(shè)計(jì)計(jì)算方法步進(jìn)電動(dòng)機(jī)動(dòng)態(tài)特性的基礎(chǔ)理論步進(jìn)電動(dòng)機(jī)的驅(qū)動(dòng)步進(jìn)電動(dòng)機(jī)的環(huán)境分配器步進(jìn)電
2007-11-16 23:38:1172 步進(jìn)電動(dòng)機(jī)概述步進(jìn)電動(dòng)機(jī)工作原理及線性解析步進(jìn)電動(dòng)機(jī)的研究設(shè)計(jì)計(jì)算方法步進(jìn)電動(dòng)機(jī)動(dòng)態(tài)特性的基礎(chǔ)理論步進(jìn)電動(dòng)機(jī)的驅(qū)動(dòng)步進(jìn)電動(dòng)機(jī)的環(huán)境分配器步進(jìn)電
2007-11-16 23:38:373 步進(jìn)電動(dòng)機(jī)概述步進(jìn)電動(dòng)機(jī)工作原理及線性解析步進(jìn)電動(dòng)機(jī)的研究設(shè)計(jì)計(jì)算方法步進(jìn)電動(dòng)機(jī)動(dòng)態(tài)特性的基礎(chǔ)理論步進(jìn)電動(dòng)機(jī)的驅(qū)動(dòng)步進(jìn)電動(dòng)機(jī)的環(huán)境分配器步進(jìn)電
2007-11-16 23:39:143 步進(jìn)電動(dòng)機(jī)概述步進(jìn)電動(dòng)機(jī)工作原理及線性解析步進(jìn)電動(dòng)機(jī)的研究設(shè)計(jì)計(jì)算方法步進(jìn)電動(dòng)機(jī)動(dòng)態(tài)特性的基礎(chǔ)理論步進(jìn)電動(dòng)機(jī)的驅(qū)動(dòng)步進(jìn)電動(dòng)機(jī)的環(huán)境分配器步進(jìn)電
2007-11-16 23:39:463 步進(jìn)電動(dòng)機(jī)概述步進(jìn)電動(dòng)機(jī)工作原理及線性解析步進(jìn)電動(dòng)機(jī)的研究設(shè)計(jì)計(jì)算方法步進(jìn)電動(dòng)機(jī)動(dòng)態(tài)特性的基礎(chǔ)理論步進(jìn)電動(dòng)機(jī)的驅(qū)動(dòng)步進(jìn)電動(dòng)機(jī)的環(huán)境分配器步進(jìn)電
2007-11-16 23:41:48714 步進(jìn)電動(dòng)機(jī)概述步進(jìn)電動(dòng)機(jī)工作原理及線性解析步進(jìn)電動(dòng)機(jī)的研究設(shè)計(jì)計(jì)算方法步進(jìn)電動(dòng)機(jī)動(dòng)態(tài)特性的基礎(chǔ)理論步進(jìn)電動(dòng)機(jī)的驅(qū)動(dòng)步進(jìn)電動(dòng)機(jī)的環(huán)境分配器步進(jìn)電
2007-11-16 23:42:465 步進(jìn)電動(dòng)機(jī)概述步進(jìn)電動(dòng)機(jī)工作原理及線性解析步進(jìn)電動(dòng)機(jī)的研究設(shè)計(jì)計(jì)算方法步進(jìn)電動(dòng)機(jī)動(dòng)態(tài)特性的基礎(chǔ)理論步進(jìn)電動(dòng)機(jī)的驅(qū)動(dòng)步進(jìn)電動(dòng)機(jī)的環(huán)境分配器步進(jìn)電
2007-11-16 23:43:093
步進(jìn)電動(dòng)機(jī)概述,步進(jìn)電動(dòng)機(jī)的工作原理及線性解析,步進(jìn)電動(dòng)機(jī)的研究設(shè)計(jì)計(jì)算方法,步進(jìn)電動(dòng)機(jī)動(dòng)態(tài)特性
2008-08-23 23:22:32124 電動(dòng)機(jī)控制電路應(yīng)用實(shí)例介紹電動(dòng)機(jī)的控制實(shí)用電路。內(nèi)容包括直流電動(dòng)機(jī)、交流電動(dòng)機(jī)、無(wú)刷電動(dòng)機(jī)、步進(jìn)電動(dòng)機(jī)的控制電路,電動(dòng)機(jī)的正反轉(zhuǎn)控制電路以及電動(dòng)機(jī)的保護(hù)電路
2008-11-03 21:27:580 本文主要介紹的是高性能 5 相步進(jìn)電動(dòng)機(jī)和裝載平滑驅(qū)動(dòng)功能的小型微步驅(qū)動(dòng)器的組合產(chǎn)品。 推出高轉(zhuǎn)矩型以及小型高性能的減速型電動(dòng)機(jī), 展開(kāi) DC 輸入5 相步進(jìn)電動(dòng)機(jī) CRK 組合系
2009-04-09 15:12:2356 本系列產(chǎn)品系為組合5 相步進(jìn)電動(dòng)機(jī)及 DC24V 輸入基板型驅(qū)動(dòng)器合為一組的成套產(chǎn)品。利用組入型基板驅(qū)動(dòng)器與 5相步進(jìn)電動(dòng)機(jī)的高特性,提高裝置的性能。
2009-04-11 10:25:1818 本系列產(chǎn)品系為將 5 相步進(jìn)電動(dòng)機(jī)及專(zhuān)用驅(qū)動(dòng)器合為一組販?zhǔn)鄣慕M合產(chǎn)品。具有 5 相步進(jìn)電動(dòng)機(jī)與專(zhuān)用驅(qū)動(dòng)器的易操作特性,是廣受好評(píng)的步進(jìn)電動(dòng)機(jī)組合產(chǎn)品。
2009-04-11 10:28:0811 步進(jìn)電動(dòng)機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換成機(jī)械角位移的電磁機(jī)械裝置,步進(jìn)電動(dòng)機(jī)的工作方式是采用脈沖控制方式工作的。只有按一定規(guī)律對(duì)各相繞組輪流通電,步進(jìn)電動(dòng)機(jī)才能實(shí)現(xiàn)
2009-06-18 16:31:2221 步進(jìn)電動(dòng)機(jī)步進(jìn)電動(dòng)機(jī)將脈沖信號(hào)轉(zhuǎn)換為角位移或線位移。主要要求:動(dòng)作靈敏、準(zhǔn)確、重量輕、體積小、運(yùn)行可靠、耗電少等。
2008-11-19 23:51:14 2509
2509 
步進(jìn)電動(dòng)機(jī)的結(jié)構(gòu)與工作原理步進(jìn)電機(jī)是利用電磁鐵原理,將脈沖信號(hào)轉(zhuǎn)換成線位移或角位移的電機(jī)。每來(lái)一個(gè)電脈沖,電機(jī)轉(zhuǎn)動(dòng)一個(gè)角度,
2008-11-19 23:53:447732 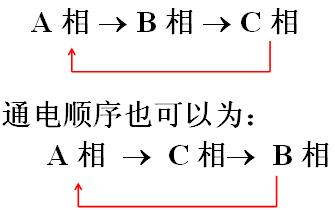
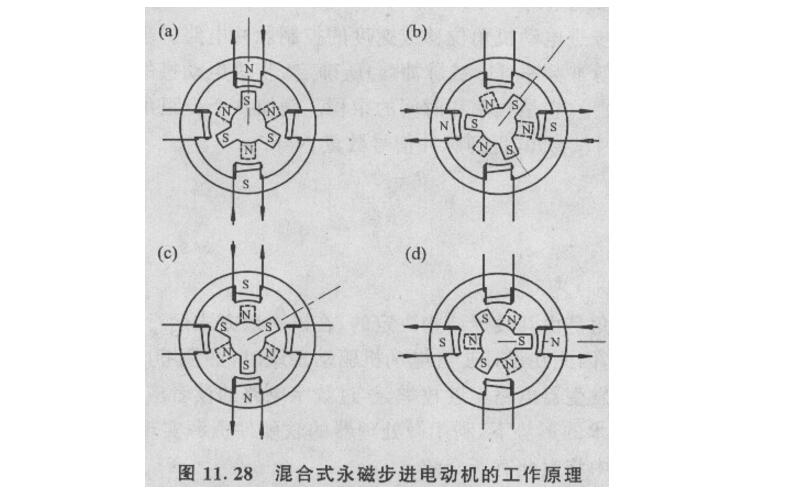
步進(jìn)電動(dòng)機(jī)的種類(lèi) 根據(jù)勵(lì)磁式方式的不同分為:反應(yīng)式、永磁式和混合式(又叫感應(yīng)子式)三種。反應(yīng)式步進(jìn)電機(jī)的應(yīng)用較多。
2008-11-19 23:59:512611 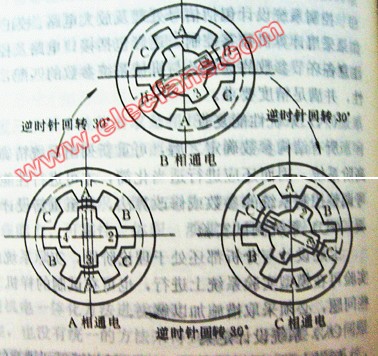
電動(dòng)機(jī)步進(jìn)角的顯示電路圖
2008-12-30 16:51:10590 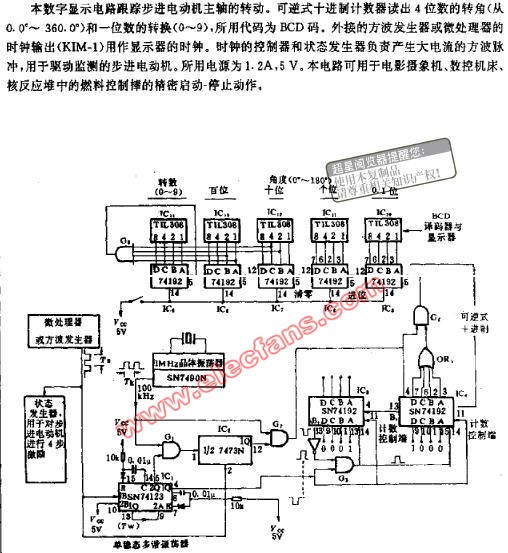
步進(jìn)電動(dòng)機(jī)的微機(jī)控制電路
2009-02-09 12:47:37551 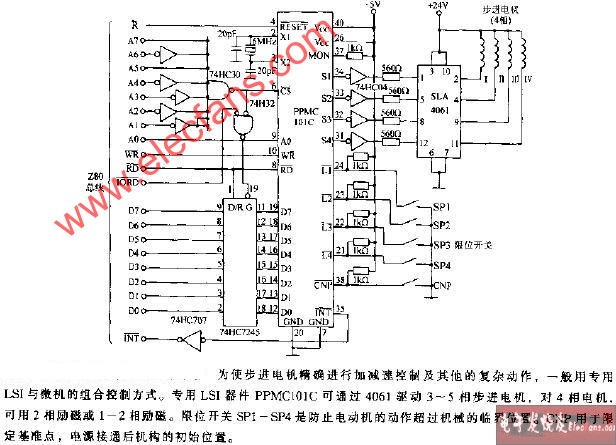
四相步進(jìn)電動(dòng)機(jī)的二相勵(lì)磁電路(正轉(zhuǎn))
2009-02-09 14:00:38485 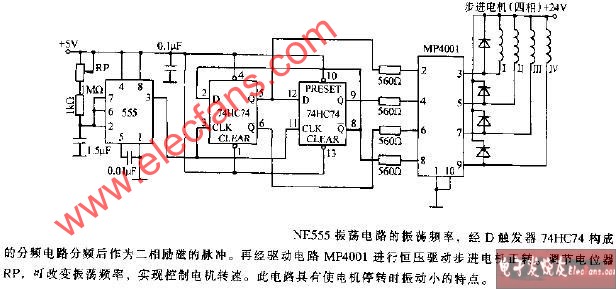
4根步進(jìn)電動(dòng)機(jī)的2相勵(lì)磁(正反轉(zhuǎn))電路圖
2009-07-18 11:36:062148 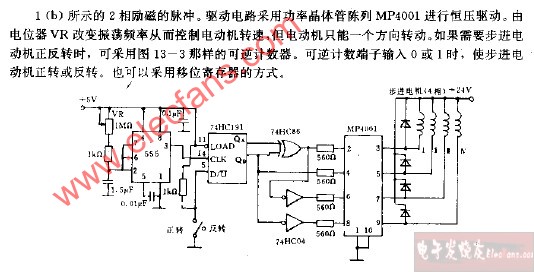
4根步進(jìn)電動(dòng)機(jī)的2相勵(lì)磁(正轉(zhuǎn))電路圖
2009-07-18 11:36:31807 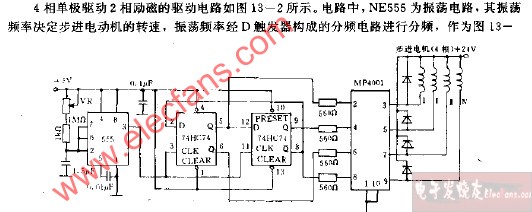
步進(jìn)電動(dòng)機(jī)的微機(jī)控制電路圖
2009-07-18 11:36:54605 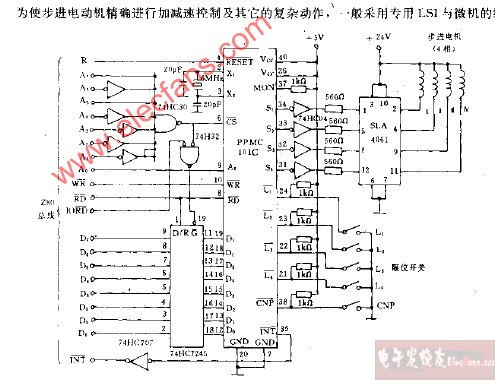
專(zhuān)用集成芯片的步進(jìn)電動(dòng)機(jī)驅(qū)動(dòng)電路圖
2009-07-18 11:40:39465 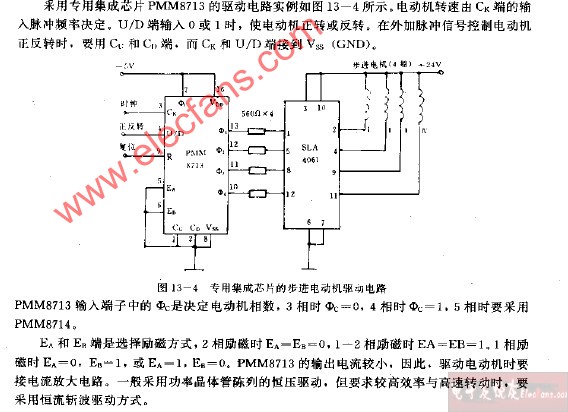
檢測(cè)步進(jìn)電動(dòng)機(jī)失步電路圖
2009-07-20 14:51:51435 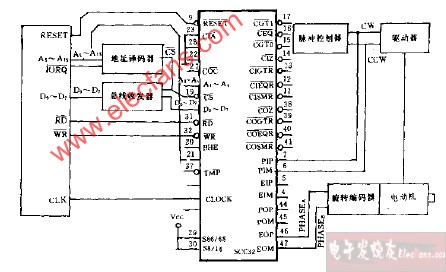
檢測(cè)步進(jìn)電動(dòng)機(jī)失步電路圖
2009-07-20 14:52:24662 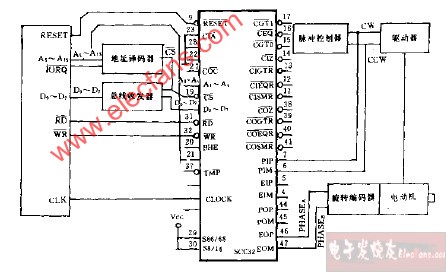
電動(dòng)機(jī)正轉(zhuǎn)逆轉(zhuǎn)驅(qū)動(dòng)電路圖
2009-08-15 16:46:271464 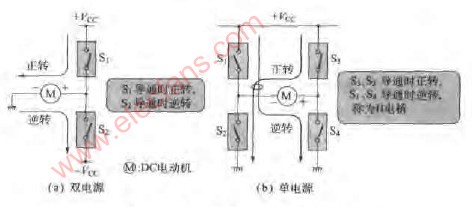
步進(jìn)電動(dòng)機(jī)課件ppt
2016-06-08 14:28:430 步進(jìn)電動(dòng)機(jī)驅(qū)動(dòng)控制器設(shè)計(jì)
2016-12-29 20:55:457 步進(jìn)電動(dòng)機(jī)可實(shí)現(xiàn)小機(jī)型高轉(zhuǎn)矩。與相同安裝尺寸的伺服電動(dòng)機(jī)相比,電動(dòng)機(jī)全長(zhǎng)縮短,可節(jié)省空間。步進(jìn)電動(dòng)機(jī)不需反饋即可與脈沖信號(hào)同步,可輕易實(shí)現(xiàn)高精度定位。與脈沖指令同步工作的高響應(yīng)性。對(duì)脈沖指令無(wú)延遲。比起同等安裝尺寸的伺服電動(dòng)機(jī),可驅(qū)動(dòng)更大的慣性負(fù)載。
2017-10-20 09:27:3516 本文介紹了步進(jìn)電動(dòng)機(jī),詳細(xì)介紹了步進(jìn)電動(dòng)機(jī)的工作原理及線性解析、研究設(shè)計(jì)和計(jì)算方法,及其動(dòng)態(tài)特性的基礎(chǔ)和驅(qū)動(dòng)等知識(shí)詳析。
2017-11-13 14:11:0816 步進(jìn)電動(dòng)機(jī)是將電脈沖激勵(lì)信號(hào)轉(zhuǎn)換成相應(yīng)的角位移或線位移的離散值控制電動(dòng)機(jī),這種電動(dòng)機(jī)每當(dāng)輸入一個(gè)電脈沖就動(dòng)一步,所以又稱(chēng)脈沖電動(dòng)機(jī)。
2018-07-12 10:45:007439 步進(jìn)電動(dòng)機(jī)按其作業(yè)原理首要可分為磁電式和反響式兩大類(lèi),這兒只介紹常用的反響式步進(jìn)電動(dòng)機(jī)的作業(yè)原理。三相反響式步進(jìn)電動(dòng)機(jī)的作業(yè)原理如圖1所示,其間步進(jìn)電動(dòng)機(jī)的定子上有6個(gè)齒,其上別離纏有U、V、W三相
2020-04-19 09:10:151461 在本教程中,我們僅介紹簡(jiǎn)單的輕型直流電動(dòng)機(jī)和步進(jìn)電動(dòng)機(jī),這些電動(dòng)機(jī)用于許多不同類(lèi)型的電子,位置控制,微處理器,PIC和機(jī)器人類(lèi)型的電路中。
2021-02-03 09:13:573115 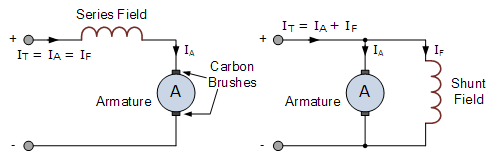
步進(jìn)電動(dòng)機(jī)步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換成相應(yīng)角位移或線位移的電動(dòng)機(jī)。每輸入一個(gè)脈沖信號(hào),轉(zhuǎn)子就轉(zhuǎn)動(dòng)一個(gè)角度或前進(jìn)一步,其輸出的角位移或線位移與輸入的脈沖數(shù)成正比,轉(zhuǎn)速與脈沖頻率成正比。因此,步進(jìn)
2021-11-25 15:21:0220 最大靜轉(zhuǎn)矩是指步進(jìn)電動(dòng)機(jī)在某相始終通電而處于靜止不動(dòng)狀態(tài)時(shí),所能承受的最大外加轉(zhuǎn)矩,亦即所能輸出的最大電磁轉(zhuǎn)矩。它反映了步進(jìn)電動(dòng)機(jī)的制動(dòng)能力和低速步進(jìn)運(yùn)行時(shí)的負(fù)載能力。
2022-10-14 10:29:151783 步進(jìn)電動(dòng)機(jī)是將電脈沖激勵(lì)信號(hào)轉(zhuǎn)換成相應(yīng)的角位移或線位移的離散值控制電動(dòng)機(jī),這種電動(dòng)機(jī)每當(dāng)輸入一個(gè)電脈沖就動(dòng)一步,所以又稱(chēng)脈沖電動(dòng)機(jī)。
2023-06-06 17:28:591326 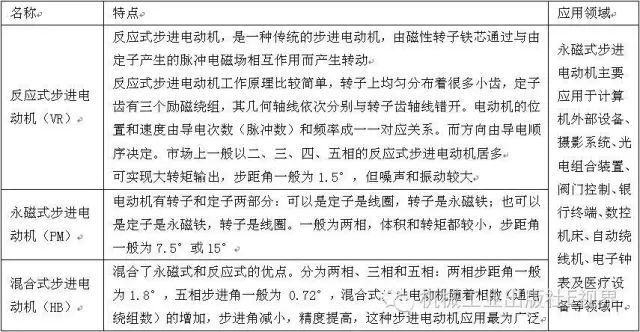
步進(jìn)伺服電動(dòng)機(jī)是一種常用的電動(dòng)機(jī)類(lèi)型,其工作原理可以通過(guò)以下步驟來(lái)解釋。 首先,讓我們看看步進(jìn)電動(dòng)機(jī)的基本構(gòu)造。它通常由一個(gè)轉(zhuǎn)子和一個(gè)固定在外殼中的定子組成。轉(zhuǎn)子由一定數(shù)量的磁極組成,而定子則包含
2023-12-08 14:48:55274
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論