機(jī)械手主要用于工業(yè)、倉(cāng)儲(chǔ)等場(chǎng)合中,面臨到外部環(huán)境影響的風(fēng)險(xiǎn)系數(shù)更高,因而要保障供電的電源連接更可靠安全,需要環(huán)境耐受性更好的工業(yè)級(jí)連接器。凌科電氣的YM系列工業(yè)級(jí)電
2024-02-19 14:03:45 81
81 
HPM5361EVK開(kāi)發(fā)板。現(xiàn)在開(kāi)始設(shè)計(jì)實(shí)戰(zhàn)AI機(jī)械臂的程序。
代碼結(jié)構(gòu)
由于編寫一個(gè)完整的用先楫HPM5361EVK開(kāi)發(fā)板控制三組四自由度機(jī)械臂,并加入紅外線傳感器、機(jī)器視覺(jué)和ChatGPT連接
2024-02-06 10:28:43
。但由于篇幅限制,下面是一個(gè)簡(jiǎn)化的項(xiàng)目方案和步驟:
(我會(huì)盡量逐行解釋關(guān)鍵部分的代碼。謝謝!)
1. 硬件連接與配置
首先,需要將TI OMAP-L138 FPGA處理器開(kāi)發(fā)板、三組四自由度機(jī)械臂以及紅外
2024-02-01 20:18:17
ZR機(jī)械手:未來(lái)工業(yè)自動(dòng)化的重要組成部分 隨著科技的飛速發(fā)展,工業(yè)自動(dòng)化已成為制造業(yè)轉(zhuǎn)型升級(jí)的關(guān)鍵。在這個(gè)過(guò)程中,ZR機(jī)械手以其卓越的性能和創(chuàng)新的技術(shù),成為了未來(lái)工業(yè)自動(dòng)化的重要組成部分。 一、技術(shù)
2024-01-23 17:09:00125 ZR機(jī)械手:創(chuàng)新引領(lǐng),助力工業(yè)自動(dòng)化升級(jí) 隨著科技的飛速發(fā)展,工業(yè)自動(dòng)化已成為制造業(yè)轉(zhuǎn)型升級(jí)的關(guān)鍵。在這個(gè)過(guò)程中,ZR機(jī)械手以其卓越的性能和創(chuàng)新的技術(shù),成為了助力工業(yè)自動(dòng)化升級(jí)的重要力量。 一、創(chuàng)新
2024-01-19 10:54:14141 ZR機(jī)械手:工業(yè)4.0時(shí)代的必備工具-速程精密 隨著工業(yè)4.0時(shí)代的到來(lái),自動(dòng)化和智能化已成為制造業(yè)的核心競(jìng)爭(zhēng)力。在這個(gè)變革的時(shí)代,ZR機(jī)械手以其卓越的性能和廣泛的應(yīng)用領(lǐng)域,成為了工業(yè)4.0時(shí)代
2024-01-15 18:22:28297 ZR機(jī)械手:技術(shù)升級(jí),推動(dòng)產(chǎn)業(yè)變革 隨著科技的飛速發(fā)展,自動(dòng)化設(shè)備在各個(gè)產(chǎn)業(yè)領(lǐng)域中的應(yīng)用越來(lái)越廣泛。作為自動(dòng)化設(shè)備的重要組成部分,機(jī)械手在提高生產(chǎn)效率、保證產(chǎn)品質(zhì)量、降低勞動(dòng)成本等方面發(fā)揮
2024-01-11 09:21:59143 ZR機(jī)械手:提高生產(chǎn)效率的利器 隨著工業(yè)自動(dòng)化的不斷推進(jìn),企業(yè)對(duì)于生產(chǎn)效率和品質(zhì)的要求越來(lái)越高。在這個(gè)背景下,速程精密成功研發(fā)的ZR機(jī)械手以其卓越的性能和廣泛的應(yīng)用領(lǐng)域,成為了提高生產(chǎn)效率的利器
2024-01-03 16:20:59140 ?隨著工業(yè)自動(dòng)化的不斷推進(jìn),工業(yè)鹽碼垛機(jī)械手作為一種高效、準(zhǔn)確的碼垛設(shè)備,在生產(chǎn)線上扮演著越來(lái)越重要的角色。其生產(chǎn)優(yōu)勢(shì)主要表現(xiàn)在以下幾個(gè)方面: ?一、效高性 ?工業(yè)鹽碼垛機(jī)械手能夠?qū)崿F(xiàn)連續(xù)、快速
2024-01-02 11:27:36150 
? ? ?隨著科技的不斷發(fā)展,許多傳統(tǒng)行業(yè)正在逐漸引入自動(dòng)化技術(shù),以提高生產(chǎn)效率和降低成本。面粉廠也不例外,其中碼垛機(jī)械手作為一種自動(dòng)化設(shè)備,已經(jīng)逐漸成為面粉廠中不可或缺的一部分。本文將探討面粉廠
2023-12-28 16:43:14139 LabVIEW開(kāi)發(fā)六軸工業(yè)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)
本項(xiàng)目開(kāi)發(fā)了一個(gè)高效的工業(yè)機(jī)器人控制系統(tǒng),重點(diǎn)關(guān)注于運(yùn)動(dòng)學(xué)算法和軌跡規(guī)劃算法的實(shí)現(xiàn)和測(cè)試。LabVIEW作為一個(gè)關(guān)鍵技術(shù),在項(xiàng)目中扮演了核心角色
2023-12-21 20:03:18
ZR機(jī)械手:工業(yè)自動(dòng)化的新選擇-速程精密 隨著工業(yè)自動(dòng)化的不斷發(fā)展,越來(lái)越多的企業(yè)開(kāi)始尋求更高效、更精準(zhǔn)的自動(dòng)化解決方案。速程精密成功研發(fā)的ZR機(jī)械手,作為一種新型的工業(yè)自動(dòng)化設(shè)備,正在成為許多企業(yè)
2023-12-19 18:16:03687 激光跟蹤儀與空間姿態(tài)探頭(iProbe 6D姿態(tài)探頭)配合使用,就組成六自由度激光跟蹤儀。它能夠根據(jù)合作目標(biāo)的精確空間姿態(tài)對(duì)被測(cè)工件的內(nèi)部特征、隱藏特征或曲面等復(fù)雜特征進(jìn)行快速、高精度的測(cè)量。
2023-12-12 09:39:51287 
機(jī)器人關(guān)節(jié)是作為機(jī)器人各個(gè)部件之間相互連接的節(jié)點(diǎn),提供了必要的運(yùn)動(dòng)自由度。關(guān)節(jié)模組用其精確度和可靠性,確保了機(jī)器人在各個(gè)領(lǐng)域的高效率和高質(zhì)量表現(xiàn)。一體化關(guān)節(jié)使得機(jī)器人能夠模擬人類肢體的活動(dòng),進(jìn)行抓取、轉(zhuǎn)動(dòng)、移動(dòng)等動(dòng)作。
2023-12-08 15:35:26222 直線模組是一種常見(jiàn)的機(jī)械傳動(dòng)裝置,廣泛應(yīng)用于機(jī)械手等自動(dòng)化設(shè)備中,在機(jī)械手中的主要作用是實(shí)現(xiàn)機(jī)械手的運(yùn)動(dòng)控制和定位。 直線模組具有高精度、高可靠性的特點(diǎn),可以滿足坐標(biāo)機(jī)械手對(duì)運(yùn)動(dòng)精度
2023-12-07 17:38:28
采用五次多項(xiàng)式插值法進(jìn)行機(jī)械臂軌跡規(guī)劃,基于Matlab Robotics Toolbox平臺(tái)進(jìn)行關(guān)節(jié)空間軌跡規(guī)劃,得到各關(guān)節(jié)角度、速度和加速度與時(shí)間關(guān)系曲線。 此外,每次重新啟動(dòng)MATLAB
2023-11-17 16:11:19369 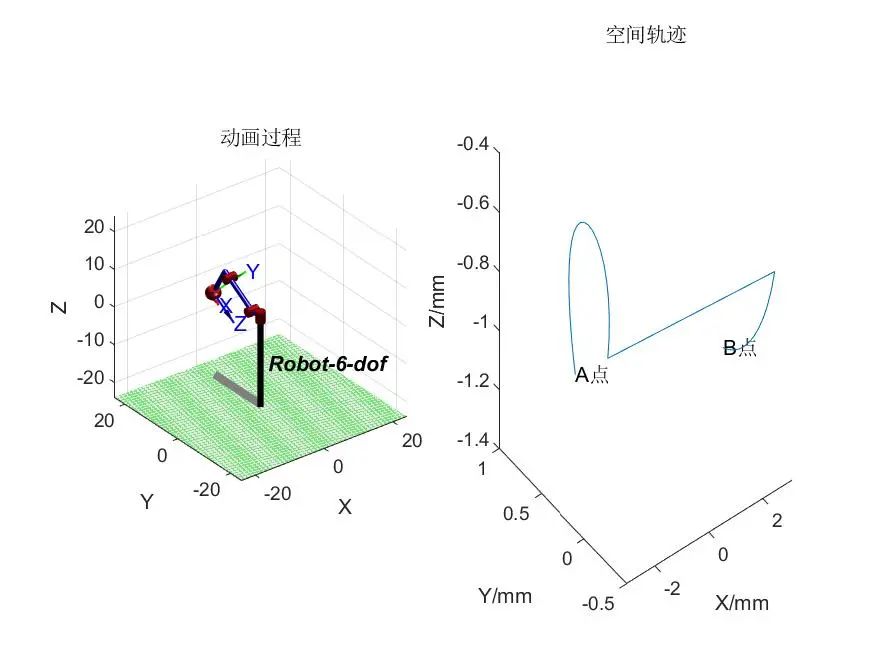
對(duì)串聯(lián)機(jī)械臂而言,軌跡規(guī)劃可以分為:關(guān)節(jié)空間軌跡規(guī)劃和笛卡爾空間軌跡規(guī)劃。關(guān)節(jié)空間軌跡規(guī)劃是把機(jī)器人的關(guān)節(jié)變量變換成跟時(shí)間的函數(shù),然后對(duì)角速度和角加速度進(jìn)行約束。 笛卡爾空間軌跡規(guī)劃是把機(jī)器人末端
2023-11-17 15:52:30255 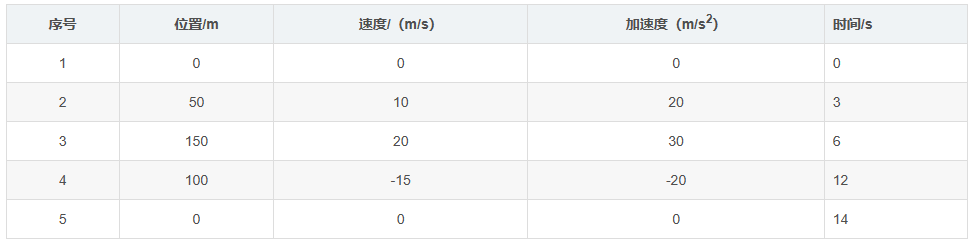
該機(jī)械臂 6 個(gè)關(guān)節(jié)都是轉(zhuǎn)動(dòng)關(guān)節(jié),前 3 個(gè)關(guān)節(jié)確定手腕參考點(diǎn)的位置,后 3個(gè)關(guān)節(jié)確定手腕的方位。和大多數(shù)工業(yè)機(jī)器人一樣,后 3個(gè)關(guān)節(jié)軸線交于一點(diǎn)。因此將該點(diǎn)作為手腕的參考點(diǎn),也選作為連桿坐標(biāo)系
2023-11-17 15:48:12822 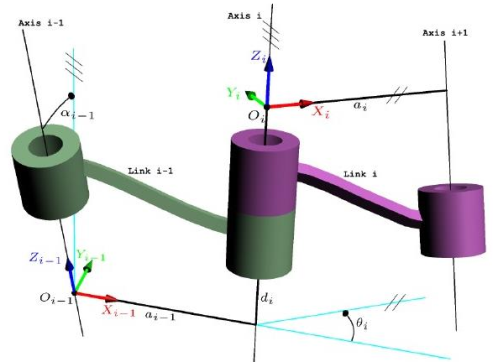
中圖儀器牽頭的國(guó)家重點(diǎn)研發(fā)計(jì)劃——“六自由度激光自動(dòng)精準(zhǔn)跟蹤測(cè)量關(guān)鍵技術(shù)"的項(xiàng)目綜合績(jī)效評(píng)價(jià)會(huì)議在深圳順利召開(kāi)。本項(xiàng)目瞄準(zhǔn)我國(guó)航空航天、汽車船舶、軌道交通、機(jī)器人、核電、大科學(xué)裝置等裝備制造領(lǐng)域
2023-10-27 11:27:00
對(duì)伺服機(jī)械手的功能和易用性進(jìn)行評(píng)估。全伺服機(jī)械手它具有動(dòng)作靈活可控、定位準(zhǔn)確可靠、負(fù)載驅(qū)動(dòng)力高、環(huán)境適應(yīng)力強(qiáng)等特點(diǎn)。目前,多自由度機(jī)械手廣泛應(yīng)用于鋼鐵、海洋、石油
2023-10-18 08:07:45419 
報(bào)名地址點(diǎn)擊報(bào)名
直播簡(jiǎn)介
1.了解機(jī)械手視覺(jué)引導(dǎo)的應(yīng)用場(chǎng)景
2.了解scara機(jī)器人運(yùn)動(dòng)學(xué)正逆解
3.了解相機(jī)畸變矯正方法
4.了解手眼標(biāo)定-9點(diǎn)標(biāo)定方法
5.了解機(jī)械手旋轉(zhuǎn)中心標(biāo)定方法
6.了解
2023-10-17 15:37:40
工業(yè)機(jī)器人是用于工業(yè)領(lǐng)域的多關(guān)節(jié)機(jī)械手或多自由度機(jī)械裝置,可高效率替代人力,汽車、3C電子是最主要的兩大應(yīng)用場(chǎng)景。高工機(jī)器人產(chǎn)業(yè)研究院數(shù)據(jù)顯示,2013年-2023年,中國(guó)工業(yè)機(jī)器人銷量預(yù)計(jì)
2023-10-13 10:44:54175 
GTS六自由度激光自動(dòng)精準(zhǔn)跟蹤測(cè)量?jī)x是高精度、便攜式的空間大尺寸坐標(biāo)測(cè)量機(jī),是同時(shí)具高精度(μm級(jí))、大工作空間(百米級(jí))的高性能光電測(cè)量?jī)x器,被廣泛應(yīng)用在飛機(jī)、汽車、船舶、航天、機(jī)器人、核電
2023-10-12 09:26:16
于工業(yè)生產(chǎn)和制造部門,而且在航天、海洋探測(cè)、危險(xiǎn)或條件惡劣的特殊環(huán)境中獲得了大量應(yīng)用。并且,它還逐漸滲透到了日常生活及教育娛樂(lè)等各個(gè)領(lǐng)域。而機(jī)器人中控制問(wèn)題始終比較難解決,怎么樣能夠更好的控制機(jī)器
2023-09-21 07:55:45
設(shè)備,專門用于在工業(yè)生產(chǎn)線或其他工業(yè)環(huán)境中執(zhí)行各種操作任務(wù)。它們通常具備多軸關(guān)節(jié)結(jié)構(gòu)或多自由度的機(jī)器裝置,能夠在三維空間內(nèi)自由移動(dòng),并搭載各種工具、夾具或傳感器來(lái)
2023-09-19 10:13:12503 工業(yè)機(jī)器人是廣泛用于工業(yè)領(lǐng)域的多關(guān)節(jié)機(jī)械手或多自由度的機(jī)器裝置,具有一定的自動(dòng)性,可依靠自身的動(dòng)力能源和控制能力實(shí)現(xiàn)各種工業(yè)加工制造功能。工業(yè)機(jī)器人被廣泛應(yīng)用于電子、物流、化工等各個(gè)工業(yè)領(lǐng)域之中
2023-09-07 08:09:06638 放低姿態(tài);f和g機(jī)械手旋轉(zhuǎn)至果籃上方;h機(jī)械手末端執(zhí)行器打開(kāi)草莓落入果籃中,至此一個(gè)草莓采摘周期完成。
?
圖3采摘過(guò)程圖
五、總結(jié)
本設(shè)計(jì)完成了采用麥克納姆全向移動(dòng)底盤的四自由度機(jī)械手并包含了視覺(jué)
2023-08-16 17:35:54
的多關(guān)節(jié)人形微機(jī)械。研究成果日前發(fā)表于《自然·通訊》期刊。 近年來(lái),飛秒激光雙光子聚合技術(shù)作為一種具有納米精度的真三維加工方式,已被廣泛應(yīng)用于制造各種功能微結(jié)構(gòu)。這些微結(jié)構(gòu)在微納光學(xué),微傳感器和微機(jī)器系統(tǒng)等領(lǐng)域展現(xiàn)
2023-08-16 09:37:08864 
機(jī)械臂是一種由多個(gè)關(guān)節(jié)連接而成的機(jī)械結(jié)構(gòu),類似于人的胳膊。它通常具有可旋轉(zhuǎn)或可伸縮的關(guān)節(jié),使其能夠在空間中執(zhí)行精確的定位和操作。機(jī)械臂通常由電機(jī)、傳感器、控制系統(tǒng)和執(zhí)行器組成。工業(yè)機(jī)器人是一種自動(dòng)化
2023-08-14 09:51:10496 
特斯拉的人形機(jī)器人中共有28個(gè)運(yùn)動(dòng)關(guān)節(jié),包括三種旋轉(zhuǎn)執(zhí)行器和三種線性執(zhí)行器。分布于肩髖等需要大角度旋轉(zhuǎn)關(guān)節(jié)所采用的主要是旋轉(zhuǎn)執(zhí)行器,而線性執(zhí)行器主要分布于膝肘等擺動(dòng)角度不大的單自由度關(guān)節(jié),以及腕踝兩個(gè)雙自由度但是體積緊湊的關(guān)節(jié)。
2023-08-14 09:22:26168 機(jī)械臂是一種由多個(gè)關(guān)節(jié)連接而成的機(jī)械結(jié)構(gòu),類似于人的胳膊。它通常具有可旋轉(zhuǎn)或可伸縮的關(guān)節(jié),使其能夠在空間中執(zhí)行精確的定位和操作。
2023-08-11 09:49:17274 直線模組在機(jī)械手中的應(yīng)用
2023-08-04 17:48:22816 
全自動(dòng)拆包機(jī)械手 常見(jiàn)的PP、PE、PVC塑料顆粒通常是由人工進(jìn)行破包上料,為題升自動(dòng)化水平減少人工成本,很多企業(yè)開(kāi)始用拆包機(jī)械手進(jìn)行這一作業(yè),拆包機(jī)械手是由機(jī)器人拆垛系統(tǒng)、包裝袋輸送系統(tǒng)
2023-08-03 10:48:21364 
GTS6000激光跟蹤儀與空間姿態(tài)探頭配合組成六自由度激光跟蹤儀,能夠根據(jù)合作目標(biāo)的精確空間姿態(tài)對(duì)被測(cè)工件的內(nèi)部特征、隱藏特征或曲面等復(fù)雜特征進(jìn)行快速、高精度的測(cè)量。
2023-07-21 10:58:58402 
本論文根據(jù)機(jī)械手控制應(yīng)用,設(shè)計(jì)了一套基于PLC基于PLC控制機(jī)械手控制設(shè)計(jì)。PL與數(shù)控技術(shù)、工業(yè)機(jī)器人并為工業(yè)自動(dòng)化三大支柱,PLC既保留了原來(lái)可編程序邏輯控制器的所有優(yōu)點(diǎn),又吸收和發(fā)展了其他
2023-07-18 15:31:17 3
3 電子發(fā)燒友網(wǎng)站提供《Scorbot ER-V+自由度機(jī)器人手臂控制器和模擬器設(shè)計(jì).zip》資料免費(fèi)下載
2023-07-10 15:08:570 電子發(fā)燒友網(wǎng)站提供《如何制作無(wú)線/手勢(shì)控制機(jī)械手.zip》資料免費(fèi)下載
2023-07-10 15:04:421 線性2自由度汽車模型是汽車操縱穩(wěn)定性分析中最簡(jiǎn)單、最典型的模型。
2023-06-28 16:52:311166 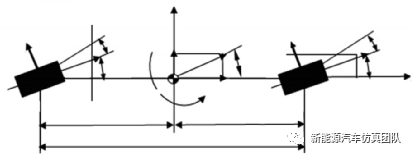
本期采用Simulink建立汽車2自由度動(dòng)力學(xué)模型。為了便于掌握汽車穩(wěn)定性的基本特性,對(duì)汽車簡(jiǎn)化為線性二自由度的汽車模型,忽略轉(zhuǎn)向系統(tǒng)的影響,直接一前輪轉(zhuǎn)角作為輸入;忽略懸架的作用,認(rèn)為汽車車廂只作用于地面的平面運(yùn)動(dòng)。
2023-06-28 16:39:131100 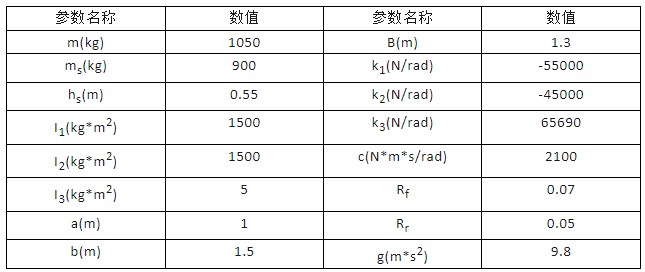
?全自動(dòng)拆包機(jī)械手 全自動(dòng)拆包機(jī)械手是由機(jī)器人拆垛機(jī)、皮帶進(jìn)料機(jī)、破袋裝置、篩分裝置、中間支架、收塵裝置、螺旋輸送機(jī)、控制箱七部分組成,它結(jié)構(gòu)緊湊,精巧美觀,操作簡(jiǎn)單方便,消耗功率小,安裝快捷方便
2023-06-28 10:12:30156 雙臂協(xié)作機(jī)器人的核心是雙臂多關(guān)節(jié)結(jié)構(gòu)和機(jī)器人操作系統(tǒng),每條臂都有高靈活性的七個(gè)自由度,比單臂協(xié)作機(jī)器人有更高的靈活性和可操作性,通過(guò)雙臂配合作業(yè),能夠模仿人類雙臂運(yùn)動(dòng)執(zhí)行多種操作,包括裝配、焊接、涂漆、拆卸和其他工作任務(wù)。
2023-06-27 09:08:32841 
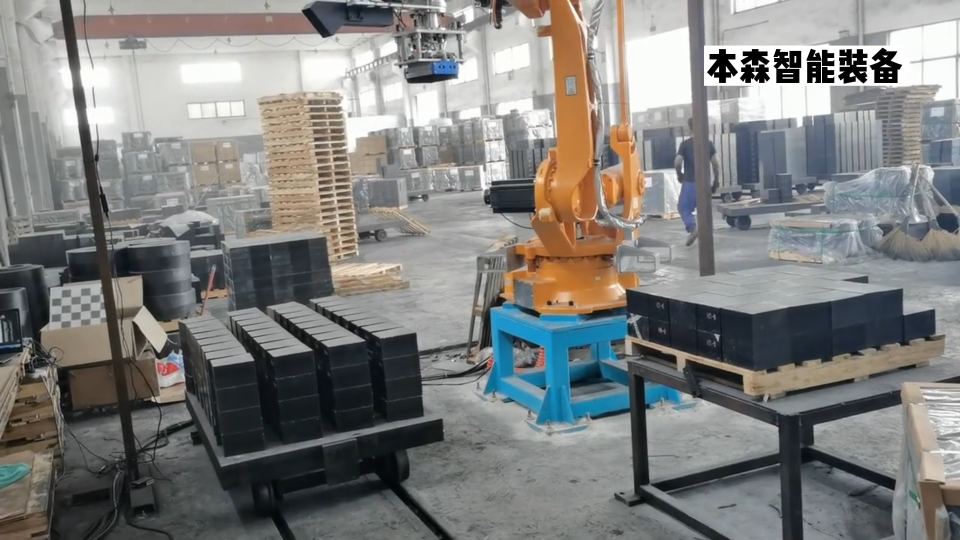
機(jī)械手或多自由度機(jī)器人,在工業(yè)生產(chǎn) 加工過(guò)程中通過(guò)自動(dòng)控制來(lái)代替人類執(zhí)行某些單調(diào)、頻繁和重復(fù)的長(zhǎng)時(shí)間作業(yè),主要包括 焊接機(jī)器人、搬運(yùn)機(jī)器人、碼垛機(jī)器人、包裝機(jī)器人、噴涂機(jī)器人、切割機(jī)器人和凈室機(jī) 器人。工業(yè)機(jī)器人在機(jī)械結(jié)
2023-06-26 10:13:10276 
梳理、分析了核化工項(xiàng)目中各類機(jī)械手的工作原理和功能特點(diǎn),并就各類機(jī)械手的適用場(chǎng)景進(jìn)行了對(duì)比,介紹了在選擇和設(shè)計(jì)機(jī)械手時(shí)需考慮的因素,總結(jié)了當(dāng)前的研究進(jìn)展和未來(lái)的發(fā)展趨勢(shì),以期為今后其他項(xiàng)目的機(jī)械手
2023-06-25 14:23:052141 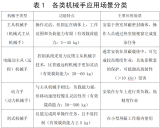
全自動(dòng)破袋機(jī)械手,拆袋破袋機(jī)器人是全自動(dòng)、智能化、一體化原料包裝袋拆垛、拆包、回收、輸送、除塵系統(tǒng)。除叉車上垛外,無(wú)需人工操作,它是由機(jī)械手抓手將要拆卸的物料袋抓取提升至割袋裝置上方,由割刀裝置
2023-06-24 15:32:26403 本文示例將實(shí)現(xiàn)4自由度并聯(lián)機(jī)器狗行走的功能。
2023-06-18 10:49:20466 
本文實(shí)例將實(shí)現(xiàn)2自由度并聯(lián)仿生腿模組運(yùn)動(dòng)起來(lái),模擬實(shí)現(xiàn)狗腿行走的動(dòng)作。
2023-06-18 10:35:20296 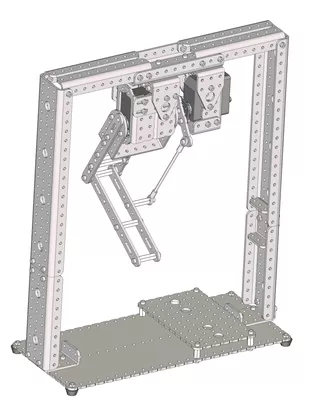
設(shè)計(jì)了一種窨井清挖機(jī)械手液壓系統(tǒng),首先擬定窨井清挖機(jī)械手液壓系統(tǒng)原理圖,該液壓系統(tǒng)由定量泵、電磁溢流閥、電磁換向閥、液壓鎖、雙單向節(jié)流閥、單向順序閥、調(diào)速閥及液壓缸等元件組成,液壓系統(tǒng)每個(gè)支路獨(dú)立動(dòng)作實(shí)現(xiàn)機(jī)械手的工作循環(huán);然后利用AMESim仿真軟件對(duì)該液壓系統(tǒng)進(jìn)行仿真,驗(yàn)證了方案的可行性。
2023-06-15 14:12:27376 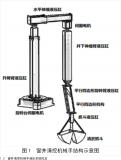
工業(yè)機(jī)器人是廣泛用于工業(yè)領(lǐng)域的多關(guān)節(jié)機(jī)械手或多自由度的機(jī)器裝置,具有一定的自動(dòng)性,可依靠自身的動(dòng)力能源和控制能力實(shí)現(xiàn)各種工業(yè)加工制造功能。工業(yè)機(jī)器人被廣泛應(yīng)用于電子、物流、化工等各個(gè)工業(yè)領(lǐng)域之中,其中如下5個(gè)領(lǐng)域被應(yīng)用最為廣泛。
2023-06-12 17:07:483838 工業(yè)機(jī)器人是面向工業(yè)領(lǐng)域的多關(guān)節(jié)機(jī)械手或多自由度的機(jī)器裝置,它能自動(dòng)執(zhí)行工作,是靠自身動(dòng)力和控制能力來(lái)實(shí)現(xiàn)各種功能的一種機(jī)器。
2023-06-09 11:42:043039 
1. 功能說(shuō)明 ? ? ? ?本文示例將實(shí)現(xiàn)R328a樣機(jī)4自由度并聯(lián)機(jī)器狗下蹲的功能。 2. 結(jié)構(gòu)說(shuō)明 ? ? ? 本樣機(jī)的并聯(lián)驅(qū)動(dòng)結(jié)構(gòu)與 【R082】4自由度并聯(lián)四足 類似,兩款樣機(jī)可以
2023-06-09 11:10:51368 
人的手臂(腕關(guān)節(jié)到肩關(guān)節(jié))有幾個(gè)自由度?我想絕大部分人都沒(méi)有想過(guò),更別說(shuō)去了解有哪幾個(gè)自由度,即使是學(xué)工科的人,也未必能解釋清楚。沒(méi)想到知乎上居然有人把這個(gè)問(wèn)題回答的這么專業(yè)有內(nèi)涵,同時(shí)又那么有哲理,忍不住想要把這個(gè)答案分享一下。
2023-06-07 15:48:16795 
平面關(guān)節(jié)型機(jī)械手設(shè)
2023-05-29 11:11:330 通常的機(jī)械臂都是由多路舵機(jī)組成,我使用的是某寶上(并不)常見(jiàn)的五自由度機(jī)械臂。盡管商家稱它為六自由度。這里使用STM32F407VGT6的6路PWM輸出通道來(lái)控制6個(gè)舵機(jī)的運(yùn)動(dòng),樹(shù)莓派(上位機(jī))通過(guò)
2023-05-26 16:50:560 工業(yè)機(jī)器人是廣泛用于工業(yè)領(lǐng)域的多關(guān)節(jié)機(jī)械手或多自由度的機(jī)器裝置,具有一定的自動(dòng)性,可依靠自身的動(dòng)力能源和控制能力實(shí)現(xiàn)各種工業(yè)加工制造功能。
2023-05-23 11:41:061486 
關(guān)于工業(yè)機(jī)器人的分類,國(guó)際上沒(méi)有指定統(tǒng)一的標(biāo)準(zhǔn),可按負(fù)載重量、控制方式、自由度、結(jié)構(gòu)、應(yīng)用領(lǐng)域等劃分。
2023-05-19 15:50:101497 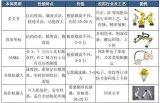
隨著機(jī)器人變得日益成熟,它們已經(jīng)能夠應(yīng)用到處理越來(lái)越多的工業(yè)工序。6自由度(6Dof)機(jī)器人能夠執(zhí)行復(fù)雜的動(dòng)作,因而可以在許多復(fù)雜的工業(yè)任務(wù)當(dāng)中展示良好的性能,比如碼垛、搬運(yùn)、涂膠和焊接等。6自由度機(jī)器人可以提舉和靈活地操縱重型載荷,并通過(guò)復(fù)雜的幾何運(yùn)動(dòng)對(duì)載荷進(jìn)行精確操控。
2023-05-18 17:34:21720 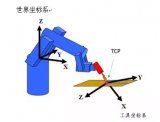
電纜和軟件也同樣屬于機(jī)器人的范疇。機(jī)械手是機(jī)器人機(jī)械系統(tǒng)主體。 它由眾多活動(dòng)的、相互連接在一起的關(guān)節(jié) (軸)組成。 我們也稱之為運(yùn)動(dòng)鏈。
2023-05-06 14:39:470 據(jù)研究員介紹,騰訊Robotics X實(shí)驗(yàn)室本次展示的機(jī)器人是在六自由度工業(yè)機(jī)械臂上搭載靈巧機(jī)器手TRX-Hand以及自主開(kāi)發(fā)的感知與控制算法后,讓機(jī)器人能夠順暢地完成一系列操作動(dòng)作。
2023-04-28 10:40:21620 作為行業(yè)領(lǐng)先的協(xié)作機(jī)器人關(guān)節(jié)模組供應(yīng)商, RJSIIZ系列機(jī)器人關(guān)節(jié)模組是泰科智能專為3-20Kg以下協(xié)作機(jī)器人而設(shè)計(jì),高度集成了包括無(wú)框力矩電機(jī)、低壓直流驅(qū)動(dòng)器、諧波減速機(jī)、制動(dòng)器和雙反饋裝置。尺寸小,符合協(xié)作機(jī)器人緊湊、靈活的設(shè)計(jì)特點(diǎn)。
2023-04-20 15:02:39485 
主體 - 即機(jī)座和執(zhí)行機(jī)構(gòu),包括臂部、腕部和手部,有的機(jī)器人還有行走機(jī)構(gòu)。大多數(shù)工業(yè)機(jī)器人有3-6個(gè)運(yùn)動(dòng)自由度,其中腕部通常有1-3個(gè)運(yùn)動(dòng)自由度;
2023-04-20 12:41:35489 定位, 且轉(zhuǎn)動(dòng)慣性小,動(dòng)態(tài)響應(yīng)快。主要應(yīng)用包括自動(dòng)化生產(chǎn)線,機(jī)器人關(guān)節(jié),機(jī)器人關(guān)節(jié)、醫(yī)醫(yī)療儀器及設(shè)備、精密儀器和工業(yè)控制系統(tǒng),以及其他許多的應(yīng)用。
2023-04-20 10:07:10
基于三維模型的視覺(jué)定位通過(guò)在查詢圖像和三維模型間建立 2D-3D 對(duì)應(yīng)關(guān)系,估計(jì)相機(jī)六自由度的位姿。傳統(tǒng)的視覺(jué)定位方法通常采用人工設(shè)計(jì)的局部特征,如 SIFT,來(lái)實(shí)現(xiàn) 2D-3D 匹配,并結(jié)合圖像檢索技術(shù),將匹配范圍限制在查詢圖像的可見(jiàn)區(qū)域,以適應(yīng)大規(guī)模場(chǎng)景的需求。
2023-04-20 10:07:05783 大家好,今天小阿暢為大家?guī)?lái)的是三菱PLC控制機(jī)械手的一個(gè)實(shí)例,快來(lái)一起看看吧!
2023-04-20 10:04:403975 RJU系列關(guān)節(jié)模組——面向商業(yè)、生活服務(wù)類應(yīng)用一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統(tǒng)外形的機(jī)器人關(guān)節(jié),而是一款能夠給機(jī)器人更多設(shè)計(jì)空間,和應(yīng)用領(lǐng)域的關(guān)節(jié),客戶可根據(jù)自身
2023-04-19 15:23:14
泰科關(guān)節(jié)機(jī)器人具備哪些優(yōu)勢(shì)? 一、編程簡(jiǎn)單可以讓無(wú)編程經(jīng)驗(yàn)的操作人員能快速設(shè)置和操作我們的直觀、3D 可視化協(xié)作式機(jī)器人。只需將機(jī)器人手臂移動(dòng)至需要的位置,或觸摸方便易用的觸屏
2023-04-19 15:13:28
機(jī)器人功能強(qiáng)大、高自重負(fù)載比、高可靠性、模塊化關(guān)節(jié)設(shè)計(jì),易于末端擴(kuò)展外部設(shè)備,可以實(shí)現(xiàn)快速安裝部署。
2023-04-19 11:29:30
深圳泰科智能TA6系列協(xié)作機(jī)器人是泰科智能自主研發(fā)的6自由度的協(xié)作機(jī)器人,具有拖動(dòng)示教、安全防碰撞等功能,可以直接與人協(xié)同工作。 采用自主設(shè)計(jì)的RJS系列關(guān)節(jié)模組,既輕便靈活、運(yùn)行平滑柔順,同時(shí)滿足
2023-04-19 11:14:26
TA6-R5協(xié)作機(jī)器人是泰科智能自主研發(fā)的6自由度的協(xié)作機(jī)器人,具有拖動(dòng)示教、安全防碰撞等功能,可以直接與人協(xié)同工作。 采用自主設(shè)計(jì)的RJS系列關(guān)節(jié)模組,既輕便靈活、運(yùn)行平滑柔順,同時(shí)滿足負(fù)荷的需求
2023-04-19 10:58:47
工業(yè)機(jī)器人技術(shù) 工業(yè)機(jī)器人是廣泛用于工業(yè)領(lǐng)域的多關(guān)節(jié)機(jī)械手或多自由度的機(jī)器裝置,具有一定的自動(dòng)性,可依靠自身的動(dòng)力能源和控制能力實(shí)現(xiàn)各種工業(yè)加工制造功能。工業(yè)機(jī)器人被廣泛應(yīng)用于電子、物流、化工等各個(gè)
2023-04-19 10:54:061374 RJU系列關(guān)節(jié)模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統(tǒng)外形的機(jī)器人關(guān)節(jié),而是一款能夠給機(jī)器人更多設(shè)計(jì)空間,和應(yīng)用領(lǐng)域的關(guān)節(jié),客戶可根據(jù)自身產(chǎn)品方向,自由定位
2023-04-19 10:53:03
RJU系列關(guān)節(jié)模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統(tǒng)外形的機(jī)器人關(guān)節(jié),而是一款能夠給機(jī)器人更多設(shè)計(jì)空間,和應(yīng)用領(lǐng)域的關(guān)節(jié),客戶可根據(jù)自身產(chǎn)品方向,自由定位
2023-04-19 10:48:11
TB6-R3協(xié)作機(jī)器人是一款靈活的小型工業(yè)協(xié)作機(jī)器人,其精巧的機(jī)械結(jié)構(gòu)設(shè)計(jì),外形緊湊,能夠適應(yīng)狹小的工作空間,及高精密的工作任務(wù)需求;這款協(xié)作機(jī)器人自重僅為11.5KG,有效負(fù)載為3KG,工作半徑達(dá)666mm,是輕型裝配和高精度控制的理想選擇。
2023-04-19 10:18:50
深圳泰科智能機(jī)器人TB6-R3協(xié)作機(jī)器人是一款靈活的小型工業(yè)協(xié)作機(jī)器人,其精巧的機(jī)械結(jié)構(gòu)設(shè)計(jì),外形緊湊,能夠適應(yīng)狹小的工作空間,及高精密的工作任務(wù)需求;這款協(xié)作機(jī)器人自重僅為11.5KG,有效負(fù)載為3KG,工作半徑達(dá)666mm,是輕型裝配和高精度控制的理想選擇。
2023-04-19 10:13:59
TB6-R15協(xié)作機(jī)器人自重僅為37KG,卻擁有處理高達(dá)15KG的有效負(fù)載,工作半徑可達(dá)1333mm,卓越的伸展能力和有效負(fù)載,能夠處理更大型、高精準(zhǔn)度領(lǐng)域的自動(dòng)化作業(yè)任務(wù)。這款協(xié)作機(jī)器人功能強(qiáng)大、高自重負(fù)載比、高可靠性、模塊化關(guān)節(jié)設(shè)計(jì),易于末端擴(kuò)展外部設(shè)備,可以實(shí)現(xiàn)快速安裝部署。
2023-04-19 09:27:59
深圳泰科智能TB6-R10協(xié)作機(jī)器人是一款功能更強(qiáng)的工業(yè)級(jí)協(xié)作機(jī)器人,能夠勝任10KG的有效負(fù)載的自動(dòng)化任務(wù),工作半徑可達(dá)1333mm,適用于大范圍、大負(fù)載的作業(yè)任務(wù),可應(yīng)用于工廠自動(dòng)化、汽車、3C、醫(yī)療、電力、科研、教育等多個(gè)行業(yè)、多場(chǎng)景的自動(dòng)化需求。-
2023-04-19 09:22:29
TB6-R5協(xié)作機(jī)器人是一款靈活的輕型工業(yè)協(xié)作機(jī)器人,具有精巧的機(jī)械結(jié)構(gòu)設(shè)計(jì)。這款協(xié)作機(jī)器人有效負(fù)載為5KG,自重僅為23KG,重復(fù)定位精度可達(dá)±0.05mm,適應(yīng)多樣性、柔性生產(chǎn)應(yīng)用需求。模塊化
2023-04-19 09:16:32
RJU系列關(guān)節(jié)模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統(tǒng)外形的機(jī)器人關(guān)節(jié),而是一款能夠給機(jī)器人更多設(shè)計(jì)空間,和應(yīng)用領(lǐng)域的關(guān)節(jié),客戶可根據(jù)自身產(chǎn)品方向,自由定位
2023-04-19 08:48:46
定位, 且轉(zhuǎn)動(dòng)慣性小,動(dòng)態(tài)響應(yīng)快。主要應(yīng)用包括自動(dòng)化生產(chǎn)線,機(jī)器人關(guān)節(jié),機(jī)器人關(guān)節(jié)、醫(yī)醫(yī)療儀器及設(shè)備、精密儀器和工業(yè)控制系統(tǒng),以及其他許多的應(yīng)用。
2023-04-18 17:35:19
TA6-R5協(xié)作機(jī)器人是泰科智能自主研發(fā)的6自由度的協(xié)作機(jī)器人,具有拖動(dòng)示教、安全防碰撞等功能,可以直接與人協(xié)同工作。 采用自主設(shè)計(jì)的RJS系列關(guān)節(jié)模組,既輕便靈活、運(yùn)行平滑柔順,同時(shí)滿足負(fù)荷的需求
2023-04-17 17:57:19
TA6-R5協(xié)作機(jī)器人是泰科智能自主研發(fā)的6自由度的協(xié)作機(jī)器人,具有拖動(dòng)示教、安全防碰撞等功能,可以直接與人協(xié)同工作。 采用自主設(shè)計(jì)的RJS系列關(guān)節(jié)模組,既輕便靈活、運(yùn)行平滑柔順,同時(shí)滿足負(fù)荷的需求
2023-04-17 17:49:50
RJU系列關(guān)節(jié)模組——面向商業(yè)、生活服務(wù)類應(yīng)用 一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統(tǒng)外形的機(jī)器人關(guān)節(jié),而是一款能夠給機(jī)器人更多設(shè)計(jì)空間,和應(yīng)用領(lǐng)域的關(guān)節(jié),客戶
2023-04-17 17:40:55
RJU系列關(guān)節(jié)模組——面向商業(yè)、生活服務(wù)類應(yīng)用 一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統(tǒng)外形的機(jī)器人關(guān)節(jié),而是一款能夠給機(jī)器人更多設(shè)計(jì)空間,和應(yīng)用領(lǐng)域的關(guān)節(jié),客戶
2023-04-17 16:25:29
深圳泰科智能TB6-R5協(xié)作機(jī)器人是一款靈活的輕型工業(yè)協(xié)作機(jī)器人,具有精巧的機(jī)械結(jié)構(gòu)設(shè)計(jì)。這款協(xié)作機(jī)器人有效負(fù)載為5KG,自重僅為23KG,重復(fù)定位精度可達(dá)±0.05mm,適應(yīng)多樣性、柔性生產(chǎn)
2023-04-17 16:12:03
深圳泰科智能TB6-R5協(xié)作機(jī)器人是一款靈活的輕型工業(yè)協(xié)作機(jī)器人,具有精巧的機(jī)械結(jié)構(gòu)設(shè)計(jì)。這款協(xié)作機(jī)器人有效負(fù)載為5KG,自重僅為23KG,重復(fù)定位精度可達(dá)±0.05mm,適應(yīng)多樣性、柔性生產(chǎn)
2023-04-17 15:57:13
RJS-II系列關(guān)節(jié)模組是泰科智能推出的一款基于模塊化理念設(shè)計(jì)、輕巧、高精度的協(xié)作機(jī)器人關(guān)節(jié),一體化集成的RJS-II不僅結(jié)構(gòu)尺寸更小,性價(jià)比更高,為您解決機(jī)器人在更多復(fù)雜環(huán)境中的適應(yīng)性和穩(wěn)定性
2023-04-17 15:02:00
2023年3月29日至4月1日,為期四天的ITES深圳工業(yè)展落下帷幕。華成工控?cái)y多關(guān)節(jié)機(jī)器人控制系統(tǒng)、多軸車床上下料機(jī)械手控制系統(tǒng)、注塑機(jī)械手控制系統(tǒng)、云平臺(tái)等多款產(chǎn)品亮相深圳工業(yè)展,引起了廣泛關(guān)注
2023-04-07 09:19:411254 
主體 - 即機(jī)座和執(zhí)行機(jī)構(gòu),包括臂部、腕部和手部,有的機(jī)器人還有行走機(jī)構(gòu)。大多數(shù)工業(yè)機(jī)器人有3-6個(gè)運(yùn)動(dòng)自由度,其中腕部通常有1-3個(gè)運(yùn)動(dòng)自由度;
2023-03-24 12:23:40809 拆包機(jī)械手
2023-03-23 11:11:28355
 電子發(fā)燒友App
電子發(fā)燒友App

















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論