 電子發燒友App
電子發燒友App


1 引 言
微型計算機原理幾乎是所有理工科類大學生的必修課目之一, 其重要性不言而喻。然而大多數教學側重于應用方面, 對計算機的結構及工作原理涉之不深, 因為無法做一個CPU 來演示。這樣學生不能真正了解其性能特點, 掌握內部結構, 在學習匯編語言的時候增加了難度, 影響學習興趣。隨著可編程邏輯器件的廣泛應用, 給數字系統的設計帶來了極大的靈活性, 用戶可以利用現場可編程門陣列FPGA 來開發出一個適合自己的專用CPU, 對微型計算機的原理及結構進行充分理解與研究, 便于將來從事相關ASIC設計, 開發出創新型的產品, 為我國計算機發展做貢獻。
現場可編程門陣列FPGA 門數眾多, 人們可以將合適的IP軟核或其他形式的核作為嵌入式模塊裝在自己的設計中。但通常IP軟核需要門數較多的FPGA 器件支持, 作為學習來說的FPGA 芯片往往資源有限, 需要節約FPGA 的成本與面積; 并且沒必要實現所有功能, 只要做出關鍵部分及重要結構,明白其運行機理, 又能與真實的CPU 緊密相聯即可。實驗箱上采用的FPGA 芯片為A ltera 公司的EPF10K20TC144- 4。這里以Inte l的8085A 為例來說明8位計算機的工作原理。
2 8085A CPU 設計及實現
2. 1 FPGA 芯片及外圍電路簡介
A ltera的FLEX10K 器件是工業界首例嵌入式PLD, 基于可重配置CMOS SRAM 元件。EPF10K20帶有144個LAB (邏輯陣列塊) 和1152 個邏輯單元, 最大I/O數目為189。另外, 芯片中嵌入式陳列塊( EAB)有6個, 其RAM 總位數為12288。
實驗涉及到FPGA 芯片的外圍部分包括控制開關、2* 8鍵盤輸入、6個數碼管輸出、8個輸入端口、8個輸出端口及2個中斷開關等。主要用來增添程序設計的靈活性及形象性, 使其可現場調試, 驗證結果, 避免單純用軟件仿真的不足。外圍電路控制模塊及結構可參見文獻[ 1] 。
現場調試時可以通過控制開關, 手動從鍵盤輸入相應的地址及數據(通過數碼管顯示), 輸錯可以修改; 用寫使能開關給RAM 寫入相應程序。當輸入完所有程序后, 按下運行開關即可執行程序, 在數碼管上顯示地址、數據及最終結果。控制開關用于配合鍵盤通過手動方式輸入程序, 可以形象化的現場編程。在軟件下載后不使用計算機, 通過按鈕、鍵盤就能將程序輸入到RAM 中, 然后運行, 顯示出結果。
2. 2 CPU模塊
2. 2. 1 內部結構
CPU 模塊的內部結構如圖1所示。微型計算機由下面幾個部分組成: 8位通用寄存器H、L, 16位程序計數器( PC ) , 16位堆棧指示器( SP), 一個加1 /減1 地址鎖存器( ADD /ADR ), 8 位NL 寄存器( NL) , 8位中斷時間寄存器( T IMER ) ; 算術邏輯單元(ALU ), 累加器(A ), 標志寄存器( FR ), 數據選擇器( SEL) ; 指令寄存器( IR) , 控制器( CON ) , 4選1多路選擇器(MUX) , 存儲地址寄存器(MAR ) , 8 位數據寄存器(MDR) ; 輸入數據寄存器( INDT ), 輸出數據寄存器( OUTDT )等部分組成。其中標志寄存器有4位, 分別是: 進位位( Cy)、零位( Z)、符號位( S)、奇偶位( P) , 微機通過檢測這些標志位的1位或多位來判斷程序是否需要轉移。
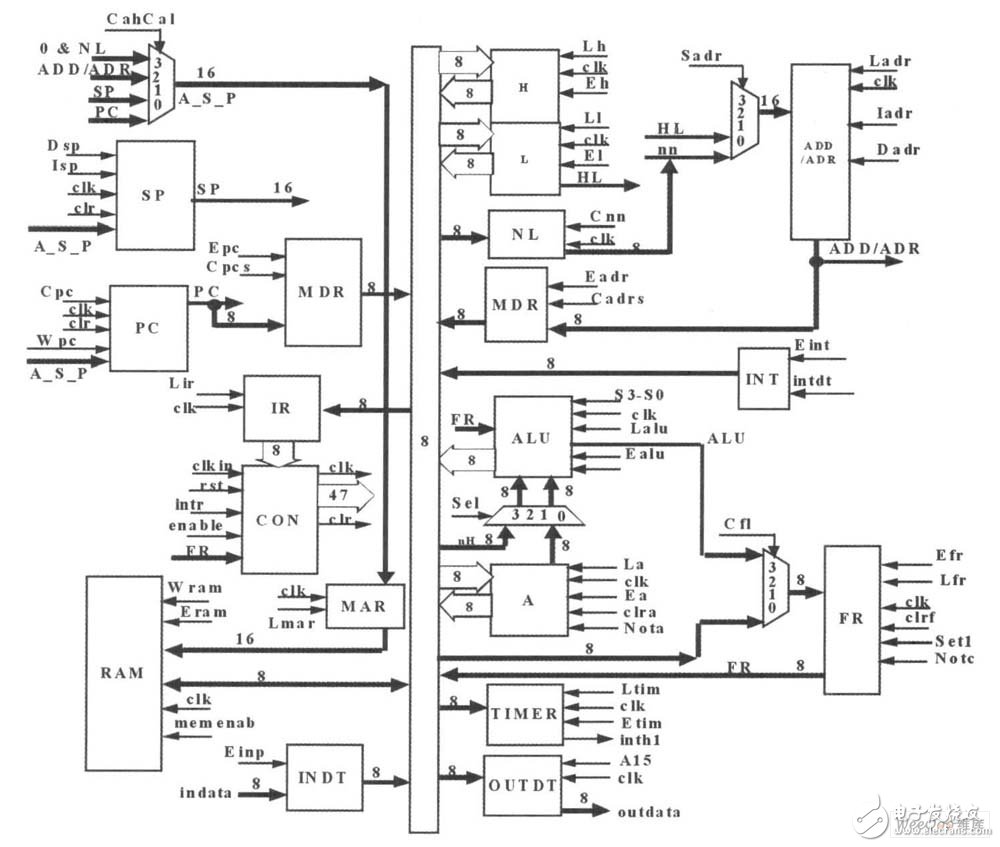
圖1 微型計算機CPU 結構圖
圖中字母L為數據載入控制信號, E 為三態輸出選通信號, clk為時鐘信號, c lr為清零信號, W 為數據載入PC信號, Cpc為控制PC 加1信號, S3- S0為控制ALU 進行加減、邏輯運算或移位運算的選擇信號, Iadr、Dadr為加1 /減1地址鎖存器加1減1控制信號, Isp、Dsp為堆棧指示器的加1減1 控制信號, E ram、W ram 為讀寫RAM 控制信號。另外, 累加器(A ) , 標志寄存器( FR )增加了專用的清零信號。
所有的控制、時鐘及清零信號由控制器( CON)模塊給出, 而CON 模塊由外部時鐘clkin、清零信號rst及使能信號enable 控制。存儲地址寄存器(MAR )用來給RAM輸送地址, 從RAM 讀指令和數據, 也可以給RAM寫數據。
A ltera公司的EPF10K20TC144 - 4 芯片中有6個嵌入式陳列塊, 其RAM 總位數為12288。這里RAM 可配置為1024 * 8( 1024個地址, 8位數據) ,直接調用參數可設置模塊庫中LPM _RAM _ IO 的LPM_FILE 文件, 用文本編輯器編輯m if文件來初始化數據。如果不用FPGA 的內部RAM, 可外接64K的8位RAM, 即尋址空間為64K。
2. 2. 2 指令系統
內部工作原理和指令系統緊密相聯。本微機共有54條指令, 可分為8類, 即數據傳送指令、算術與邏輯運算指令、移位指令、增量與減量指令、堆棧操作及中斷指令、轉移指令、子程序調用及返回指令、其它指令等。指令系統與8080 /8085的指令系統表基本一致, 標志位的變化(無輔助進位位) 與其相同, 可參見文獻。
由于資源所限, 沒有使用8085A 所有的寄存器及某些功能, 如B、C、D、E 寄存器等, 但是這并不妨礙本微機能夠實現其絕大多數功能。從時鐘周期數(狀態數)來說, 比8085A 更少, 也就是說速度更快。
數據傳送指令有14條(一個n表示一個8位二進制數據): 3個狀態數的movah (將H 的內容存入A )、movha、mov la(將A 的內容存入L)、mova;l 4狀態的mvian(將數據n存入A)、mv ihn、mv iln、mvitn(將數據n 存入t ime寄存器, 此指令為新增) ; 5 狀態的movma(將A 的內容裝入HL所指的地址)、movam; 4狀態數的sphl(將HL寄存器的內容裝入SP); 6狀態的inn( n所指地址的內容給A )、outn; 4狀態的cd _out(A內容給PC+ 1, 停機, 此指令為新增)等。
算術與邏輯運算指令有13 條: 3 狀態的cmc( Cy符號取反)、stc( Cy置1) 、cma(寄存器A 內容取反); 4狀態的addh(將A 與H 相加后給A )、adin(將A 與n相加后給A)、subh、su in、cmph(將A 與H相比較(只影響符號) )、adch(將A 與H 及符號Cy相加后給A )、sbbh、anah(將A 與H 寄存器的內容相與后給A )、orah、xrah(將A 與H 異或后給A )等。
移位指令有4條, 同8085A。增量與減量指令有4條, 只針對H、L寄存器。堆棧操作及中斷指令有8條: 7 狀態的pushh( HL 壓入堆棧)、pushp( AF壓入堆棧); 6狀態的poph、popp; 8狀態的rsta(重新啟動); 3狀態的etim e( T 寄存器使能, 此指令為新增)、eint(中斷使能)、d int等。轉移指令有5條: 7狀態的jmpn(無條件轉移至程序nn, 低位在前); 不跳轉時5狀態, 跳轉時7狀態的jnn( Z= 1時轉移至程序nn)、jcn、jmn、jpen等。子程序調用及返回指令有2條: 11狀態的calln (保留當前PC, 轉移至程序nn, 低位在前)、7狀態的ret(返回)。其它指令有4條: 3狀態的nop、c lrF(標志寄存器清零, 此指令為新增)、clrA (A 清零, 此指令為新增)、hlt等。
狀態數的計算, 若本次指令的前面一指令為3狀態數時, 本指令將會減少1 狀態。如: movha,adin; 若第1指令movha前沒有其它3 狀態指令時,它是3個狀態, 而adin會減少1狀態, 由原來的4狀態變為3狀態。再如: mov la, movha; 則后一狀態由3狀態變成2狀態。其余類似(但不包括rsta)。
2. 2. 3 工作原理
由圖1可知, 不同的子模塊一共有20個, 每個模塊用VHDL程序來實現, 最后用元件例化語句構成總模塊。下面以設計算術邏輯部件模塊c_alu及控制模塊c_con為例簡要介紹一下思路。
( 1)算術邏輯部件c_alu。
算術邏輯部件c_a lu非常占用FPGA的邏輯單元log ic cells, 需要盡量優化。S3- S0為控制ALU 進行加減、邏輯或移位運算的選擇信號, 一共可得到16種運算, 這里用了13種: 6種算術、3種邏輯運算和4種移位指令。如加法、減法、加1、減1、帶符號位加法、帶符號位減法; A 或B、A 與B、A 異或B; A 左移、A右移、A 帶Cy 左移、A 帶Cy右移等。另外, ALU 的運算直接影響到符號位的變化, 運算結果存入標志寄存器( FR)。有關alu的運算多為4個狀態。
( 2)控制模塊c_con。
占用FPGA 的邏輯單元log ic ce lls最多的是控制模塊c_con。在參考文獻[ 3] 中的思路不再適合于稍大型的CPU 設計, 但它是理解如何控制CPU 信號的一個起點。對于一條指令應該細化到每一個步驟及每一位, 而不再是以一個控制字的方式去實現。以指令movah為例, 首先把PC 值送入MAR 寄存器, 此為狀態s0, 這時起作用的是Lmar; 然后在狀態s1時, PC值加1, 將存儲器單元中的內容讀入到IR, 這時Cpc、E ram、Lir起作用, Lmar不再起作用, 需要置0; 接著在狀態s2時, 對IR 寄存器中的指令進行譯碼, 所有的操作指令都是在此狀態譯碼(不包括rsta)。對于3狀態指令, 不保存指令, 直接執行, 然后跳轉到狀態s1。因此對于下一條指令來說, 其狀態數減1。
指令中狀態數最多的是子程序調用ca lln指令。
C alln指令要保存PC 值到SP- 1及SP- 2中, 然后跳轉到子程序。考慮到返回指令ret執行后, PC 要重新在原位置執行, 那么存入SP中的PC 值應該是在得到其指令后加3。對PC 進行單獨加3是一種思路, 但需要另外耗費資源, 并且增加狀態。這里采用了先把ca lln后的nn存入16位的加1 /減1 地址鎖存器, 然后保存PC 到SP, 再將nn 賦值給PC, 跳轉到子程序的方法。返回指令ret不僅可以用作子程序調用后的返回, 還可用于中斷的返回。
2. 3.。 FPGA 實現及編程思路
由于使用內部RAM, 其地址空間為0000 -03FFH。通常在00H 中放入28 (即jmpn, 跳轉指令) , 將程序跳轉到從40H 開始。把03- 0EH 作為放常用變量的空間, 用inn及outn指令來調用, 以解決寄存器不足的缺陷。這也是一種編程思路, 可參見文獻[ 4] 。0FH、1FH、2FH 分別為外部中斷0( int0) , 外部中斷1( int1), 定時器中斷( time) 的起始位置。Int0優先級最高, int1次之, time最低。中斷信號高電平有效。中斷功能的實現是為了學習其工作原理, 只做了一個定時器中斷。計時為減1方式, 當計時為0時, 發出中斷信號。T ime中斷的使用方法: 首先關中斷( dint), 給T賦值(mv itn) , 再開中斷( e int), T寄存器使能( et ime)。此后, T 寄存器正常工作。若要再次使用, 首先給T 賦值, 然后T寄存器使能。
初始時的PC 為0000H, SP為03FFH。SP的更改可通過指令sph l來執行。針對實驗箱, 將8000-0FFFFH 作為輸出口地址, 4000 - 7FFFH 作為輸入口地址。而實際實驗箱上只定義了1個8位輸入, 1個8位輸出。IO 口的操作可通過movam 及movma指令去實現。
由于鍵盤輸入時, 要進行去抖動處理, 使用了兩種不同的時鐘頻率。鍵盤處理采用1KH z的頻率,而CPU 的工作時鐘可選擇實驗箱上的不同頻率, 從1H z到10MH z皆可, 甚至可以外接其它更高頻率。
如果采用1H z的clk in 頻率, 可以清楚地看到CPU工作的每一過程。
將本微機下載到實驗箱上, 已成功實現了乘法(用減1或右移的方法), 調用子程序, IO 口的使用,中斷的使用等多項實驗, 驗證了CPU 設計的正確性。
3 結束語
QuartusII對微機進行編譯, 其邏輯單元LE 用到1151, 占100% 。用FPGA 來實現CPU 的功能, 研究其工作原理, 然后用Synp lify pro軟件對其進行門級研究, 對CPU 的面紗將不再感到神秘, 有利于做成專用集成電路ASIC, 控制其規模, 節約芯片成本與面積。同時, 也會增加對FPGA 的學習興趣和使用技巧, 開發出更多新的產品。












 工商網監
工商網監
評論