 電子發(fā)燒友App
電子發(fā)燒友App


趙 洋 1,2,王藝鋼 1,靳永強(qiáng) 1,華 丹 1
(1. 沈陽化工大學(xué) 計算機(jī)科學(xué)與技術(shù)學(xué)院,遼寧 沈陽 110142;
(2. 遼寧省化工過程工業(yè)智能化技術(shù)重點(diǎn)實(shí)驗室,遼寧 沈陽 110142)
摘 要 :由于以往視頻煙火檢測模型復(fù)雜,存在檢測精度與速度不能兼顧的問題,提出一種改進(jìn) SSD 的輕量化視頻煙火檢測算法(GSSD)。該算法首先將 SSD 算法中的骨干網(wǎng)絡(luò)替換為 GhostNet 網(wǎng)絡(luò)模型,減少算法參數(shù)量,提高檢測速度,之后通過 Concat 操作進(jìn)行多尺度特征融合,提升算法對小目標(biāo)的檢測精度。該算法分別在PASCAL VOC 2012 數(shù)據(jù)集和煙火數(shù)據(jù)集上進(jìn)行了實(shí)驗。實(shí)驗結(jié)果表明,在相同工況條件下,GSSD 算法相比 SSD算法的 mAP 提高了 4.8%,檢測速度提升了 1.9 倍,參數(shù)量減少了 84.64%。
關(guān)鍵詞 :煙火檢測 ;輕量化 ;SSD ;GhostNet ;Concat ;特征融合
中圖分類號 :TP751 文獻(xiàn)標(biāo)識碼 :A? ? ?
文章編號 :2095-1302(2022)08-0031-05
0 引 言
為解決目前火災(zāi)頻發(fā),消防設(shè)施和消防人員不足的問題,減少人民生命和財產(chǎn)安全損失,需要對火災(zāi)做出更加快速而準(zhǔn)確的檢測[1]。目前傳統(tǒng)的煙火檢測通常借助傳感器檢測煙霧氣體特征和火焰紅外信息,這種檢測方法檢測精度低,響應(yīng)速度慢,在智能化、抗干擾和成本等方面有待加強(qiáng)[2]。基于視頻的煙火檢測可以很好地彌補(bǔ)上述不足。視頻煙火檢測借助攝像頭傳輸?shù)囊曨l畫面,檢測煙火位置并提供豐富的現(xiàn)場狀況,便于采取相應(yīng)的措施,及時解決火情[3]。
近年來,不少學(xué)者從不同的角度研究了視頻煙火的檢測問題。文獻(xiàn)[4] 根據(jù)人眼視覺注意機(jī)制,提出基于顯著性檢測和高斯混合模型的視頻煙霧分割方法,提高了檢測精度和速度。該算法過于依賴手工提取特征,算法魯棒性較差,難以應(yīng)用于復(fù)雜的煙火檢測場景。文獻(xiàn)[5] 針對視頻火災(zāi)檢測算法泛化能力弱等問題,提出了一種基于ViBe和機(jī)器學(xué)習(xí)的算法,該算法依靠ViBe算法以及隨機(jī)森林和支持向量機(jī)組成的兩級分類器,對前景信息進(jìn)行選擇性提取,再結(jié)合Hu矩陣訓(xùn)練出決策分類器,提升檢測穩(wěn)定性。由于隨機(jī)森林和支持向量機(jī)等算法對特征提取的能力較弱,該算法存在分類效果較差,誤報率較高的問題。文獻(xiàn)[6]利用YCrCb顏色空間對捕獲的圖像進(jìn)行分割,使用基于分群體融合的改進(jìn)FOA算法搜索SVM最優(yōu)參數(shù)和懲罰因子,提升了對火災(zāi)圖像的分類效果。該算法以參數(shù)量較大的元啟發(fā)式算法(MetaHeuristic Algorigthm)為基礎(chǔ),在檢測速度上不能滿足對視頻實(shí)時檢測的需求。上述方法主要依靠人工提取特征,算法的泛化能力不強(qiáng),檢測精度和速度都難以滿足實(shí)時穩(wěn)定檢測的需求。
隨著深度學(xué)習(xí)的發(fā)展,使用卷積神經(jīng)網(wǎng)絡(luò)(CNN)取代人工提取特征成為趨勢,眾多學(xué)者展開了將CNN應(yīng)用到煙火檢測中的研究。文獻(xiàn)[7]通過CNN對火災(zāi)圖像進(jìn)行自動特征提取和分類,大幅提升了對煙火圖像分類的精度和速度,但該算法沒有深入應(yīng)用到檢測任務(wù)中。文獻(xiàn)[8]提出了一種改進(jìn)YOLOv3的火災(zāi)檢測方法,通過改進(jìn)特征提取網(wǎng)絡(luò)和多尺度檢測網(wǎng)絡(luò),提高了檢測效果,但該算法模型尺寸較大,計算成本較高。文獻(xiàn)[9]將SSD算法與輕量化模型MobileNet結(jié)合,對實(shí)時火災(zāi)圖像進(jìn)行檢測,提升了算法的檢測速度,降低了模型復(fù)雜度,但在檢測精度上存在一定不足。上述深度學(xué)習(xí)方法在一定程度上提升了算法的檢測性能,但是并沒有完全平衡高檢測精度、實(shí)時檢測和小模型尺寸對算法的要求。
針對上述模型復(fù)雜度較高,檢測速度與檢測精度難以兼顧的問題,本文提出了一種基于改進(jìn)SSD[10] 的視頻煙火檢測算法(GSSD)。首先,使用GhostNet[11] 輕量化網(wǎng)絡(luò)模型替換SSD算法中的VGG16[12]網(wǎng)絡(luò)模型。相較于VGG16網(wǎng)絡(luò)模型,GhostNet網(wǎng)絡(luò)模型大幅度減少了模型的參數(shù)量,并在PASCAL VOC 2012數(shù)據(jù)集上具有較高的準(zhǔn)確率。使用GhostNet 網(wǎng)絡(luò)模型可以提高算法的檢測速度,減少模型的參數(shù)量。其次,在SSD算法的特征映射網(wǎng)絡(luò)中使用多尺度特征融合技術(shù)。通過下采樣和Concat拼接操作,對多尺度的特征圖進(jìn)行融合,以提升模型對小目標(biāo)物體的檢測能力。通過以上改進(jìn)得到了GSSD算法,該算法有效改善了原始SSD算法檢測精度不高、檢測速度慢和模型參數(shù)量大的問題。在PASCAL VOC 2012數(shù)據(jù)集和自制的煙火數(shù)據(jù)集上對GSSD算法進(jìn)行實(shí)驗。結(jié)果表明,該算法具有更高的檢測精度和速度,以及更小的模型復(fù)雜度。 ? 1 SSD 算法 SSD算法主要由骨干網(wǎng)絡(luò)、特征映射網(wǎng)絡(luò)和檢測網(wǎng)絡(luò)組成,其算法流程如圖1所示。
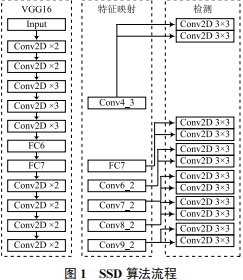
SSD算法使用改進(jìn)的VGG16 網(wǎng)絡(luò)模型作為骨干網(wǎng)絡(luò)[13]。考慮到全連接層會干擾模型對特征位置信息的提取,將VGG16網(wǎng)絡(luò)中的兩個全連接層FC6和FC7替換為3×3卷積1×1卷積。為進(jìn)一步提取特征,在FC7層后添加4組卷積層:Conv6、Conv7、Conv8和 Conv9,每組卷積層首先使用1×1卷積核進(jìn)行下采樣,然后使用3×3卷積核進(jìn)行特征提取。
特征映射網(wǎng)絡(luò)選取若干尺寸不一的特征圖,為檢測提供更多的特征信息。SSD 算法選用6個卷積得到的特征圖為:Conv4_3、FC7、Conv6_2、Conv7_2、Conv8_2、Conv9_2。
在檢測網(wǎng)絡(luò)中,使用2個大小為3×3的卷積核對特征提取網(wǎng)絡(luò)的6張?zhí)卣鲌D進(jìn)行卷積運(yùn)算,其中一個卷積核輸出類別置信度,另一個為回歸提供對象位置信息。所有運(yùn)算結(jié)果被合并后,轉(zhuǎn)移給損失計算函數(shù),然后迭代訓(xùn)練直到模型收斂。
由于SSD算法采用改進(jìn)的VGG16網(wǎng)絡(luò)模型作為骨干網(wǎng)絡(luò),其僅僅依靠多層卷積進(jìn)行特征提取,網(wǎng)絡(luò)結(jié)構(gòu)較為單一,網(wǎng)絡(luò)模型中含有較多冗余計算。針對SSD算法的不足,本文通過相對應(yīng)的改進(jìn)提出了對視頻煙火檢測效果更優(yōu)的GSSD算法。
2 GSSD
2.1 骨干網(wǎng)絡(luò)改進(jìn)
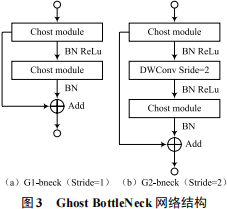
GhostNet是一種通過少量計算表征更多特征的輕量化卷積神經(jīng)網(wǎng)絡(luò)。相較于MobileNet 系列[14-16]和ShuffleNet系列[17-18]等輕量級網(wǎng)絡(luò)模型,GhostNet具有更高的準(zhǔn)確率 [19]。各輕量化模型在PASCAL VOC 2012數(shù)據(jù)集上的比較結(jié)果見表1所列。由表1可知,GhostNet雖然具有較大的模型參數(shù)量,但準(zhǔn)確率得到了大幅度提升,可以認(rèn)為GhostNet相比其他輕量化模型具有一定優(yōu)勢。
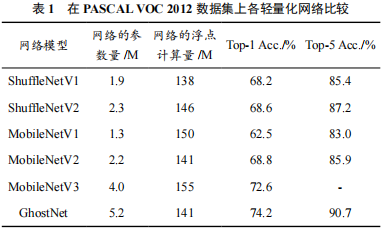
GhostNet的核心思想是使用一系列線性運(yùn)算代替部分卷積,減少推理計算量。這種結(jié)合卷積運(yùn)算和線性運(yùn)算的模塊叫做GhostNet module,其結(jié)構(gòu)如圖2所示。
GhostNet module將傳統(tǒng)的卷積分為三步。首先使用較少的卷積核生成第一部分特征圖;其次對該部分特征圖采用深度卷積(Depthwise Convolution)運(yùn)算得到第二部分特征圖;最后將兩組特征圖通過Concat方式拼接,得到GhostNetmodule的運(yùn)算結(jié)果。
為對比GhostNet module和VGG16中普通卷積的運(yùn)算成本,分別計算所需的浮點(diǎn)計算量和運(yùn)算時的參數(shù)量。當(dāng)輸入特征圖的尺寸為H×W×Cin,輸出特征圖的尺寸為H×W×Cout,普通卷積核大小為k×k,通道卷積核大小為k*×k*,Ghost module中標(biāo)準(zhǔn)卷積數(shù)為Cout/n時, 使 用VGG16普通卷積的浮點(diǎn)計算量為 :

Ghost module的浮點(diǎn)計算量為 :

VGG16普通卷積的參數(shù)量為 :

Ghost module的參數(shù)量為 :

由公式(1)~公式(4)可以看出,相較于標(biāo)準(zhǔn)卷積運(yùn)算,Ghost module壓縮了大約n 倍的浮點(diǎn)計算量和參數(shù)量。
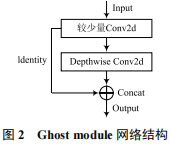
通過對Ghost module的堆疊,可以得到GhostNet的兩種殘差結(jié)構(gòu)(Ghost BottleNeck),如圖3所示。stride=1的Ghost BottleNeck(G1-bneck) 串聯(lián)2個Ghost module用于特征提取 ;stride=2的Ghost BottleNeck(G2-bneck)在2個Ghost module之間添加了步長為2的深度卷積,使G2-bneck可以用于下采樣。
2.2 多尺度特征融合
深層卷積層中的小目標(biāo)經(jīng)過多次卷積和池化操作后,容易丟失大量的特征信息 ;在淺層卷積層中存在目標(biāo)特征提取不足,冗余信息過多以至于干擾檢測效果等問題。本文通過將淺層特征與深層特征進(jìn)行多尺度融合的方式來改善。綜合考慮檢測精度與模型計算量,對算法進(jìn)行改進(jìn),如圖4所示。
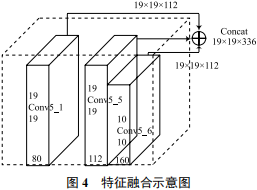
多尺度特征融合分為三步。首先對Conv5_1層的特征圖做卷積運(yùn)算,將通道數(shù)擴(kuò)張到112個;其次將Conv5_6層特征圖上采樣到19×19,并將特征通道數(shù)由160個降為112個 ;最后將Conv5_1 層、Conv5_5層和Conv5_6層的特征圖做Concat拼接,拼接后特征圖的通道數(shù)為336個。
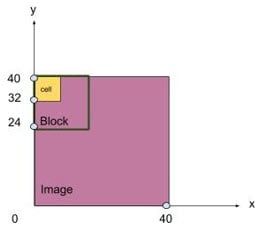
Conv5_1層位于網(wǎng)絡(luò)較淺層,特征圖通道數(shù)較少,擁有較多的特征信息,在與Conv5_5融合前需要對其做進(jìn)一步的特征提取。為加強(qiáng)對Conv5_1層特征圖的信息提取,采用步長為1,膨脹率為2,卷積核為3的空洞卷積[20]進(jìn)行運(yùn)算。空洞卷積是一種在不做pooling 損失信息的前提下,可以擴(kuò)大卷積時的感受野,提高特征提取能力的卷積運(yùn)算,其示意如圖5所示。
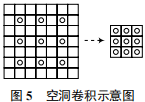
空洞卷積的輸入與輸出特征圖的大小關(guān)系為 :

式中:p為填充像素的大小;d為膨脹率;s為步長;k為卷積核大小;W1為輸出特征圖的尺寸;W2為輸入特征圖的尺寸。
Conv5_6層位于網(wǎng)絡(luò)較深層,特征圖尺寸較小,在與Conv5_5融合前需要通過上采樣增大特征圖的尺寸。對Conv5_6層特征圖的上采樣操作選用雙線性插值法。相較于轉(zhuǎn)置卷積,雙線性插值法不需要訓(xùn)練新參數(shù),運(yùn)行速度更快且操作簡單,更適用于對檢測速度和模型計算量有較高要求的視頻煙火檢測。
2.3 GSSD 網(wǎng)絡(luò)
通過對SSD算法的骨干網(wǎng)絡(luò)以及特征融合模塊的改進(jìn)得到GSSD算法,該算法網(wǎng)絡(luò)結(jié)構(gòu)見表2所列。
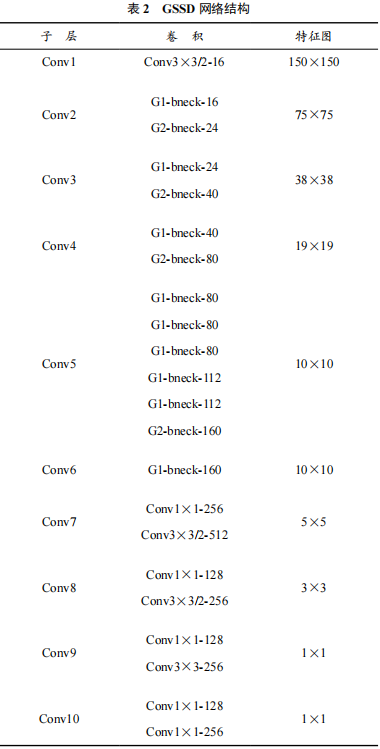
在模型訓(xùn)練過程中, 將Conv5_1層、Conv5_5層、Conv5_6層的輸出進(jìn)行特征融合,作為第一張?zhí)卣鲌D,再選取Conv6、Conv7_2、Conv8_2、Conv9_2、Conv10_2特征圖。使用2個大小為3×3的卷積核對檢測網(wǎng)絡(luò)中的每個特征圖進(jìn)行卷積運(yùn)算,分別得到類別置信度和回歸信息。最后將計算結(jié)果合并傳遞給損失計算函數(shù)。
3 實(shí)驗及結(jié)果分析
3.1 數(shù)據(jù)集
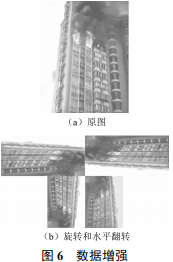
本文使用的數(shù)據(jù)集為PASCAL VOC 2012公共數(shù)據(jù)集和自制的煙火數(shù)據(jù)集。PASCAL VOC 2012數(shù)據(jù)集包含20個類別,5717張用以訓(xùn)練的圖片,5823張用以驗證的圖片。自制的煙火數(shù)據(jù)集包含 fire 和 smoke 兩個類別,8199張圖片,按照7∶2∶1的比例分配為訓(xùn)練集、驗證集和測試集。由于自制的煙火數(shù)據(jù)集圖片數(shù)量有限,為了讓模型更好地學(xué)習(xí)目標(biāo)特征和提高魯棒性,需要對數(shù)據(jù)做數(shù)據(jù)增強(qiáng)。本文對圖像進(jìn)行 90°、180°、270°旋轉(zhuǎn)和水平翻轉(zhuǎn),如圖6所示。
3.2 評價指標(biāo)
本文將通過訓(xùn)練后模型檢測的平均精度(mean AveragePrecision,mAP)、模型參數(shù)量(Params)和模型推理速度(FPS)做對比,其中mAP由式(6)~式(9)計算 :
式中:TP為真正例;FP為假正例;FN為負(fù)正例;c為種類數(shù)。
3.3 對比試驗
為驗證GSSD算法的檢測性能,將GSSD算法與目標(biāo)檢測效果良好的SSD、YOLOv2[21]、YOLOv3[22]模型分別在PASCAL VOC 2012數(shù)據(jù)集與煙火數(shù)據(jù)集上進(jìn)行實(shí)驗對比,4種算法的性能測試結(jié)果見表3所列。
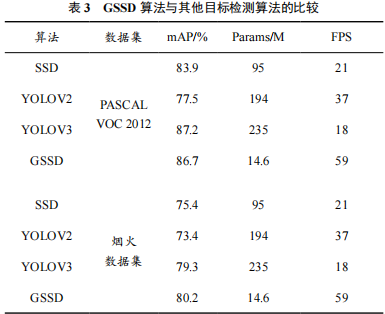
在PASCAL VOC 2012數(shù)據(jù)集上, 相 比SSD算 法,GSSD算法的檢測效果有較大幅度提升,mAP提高了2.8%,Params減少了84.64%,F(xiàn)PS 提升了1.9倍。GSSD算法在SSD的基礎(chǔ)上進(jìn)行相應(yīng)改進(jìn)和拓展,提高目標(biāo)檢測的效果,顯著降低了模型參數(shù)量,提升了檢測速度。
與YOLO系列算法相比,GSSD比YOLOv2的mAP提高了19.2%,Params減少了92.5%,F(xiàn)PS 提升了59%。YOLOv2算法的網(wǎng)絡(luò)結(jié)構(gòu)較為簡單,僅依靠卷積層和池化層對特征進(jìn)行提取,檢測精度較低。GSSD算法比YOLOv3的mAP降低了0.5%,Params減少了93.8%,F(xiàn)PS 提升了70%。YOLOv3算法使用融入殘差結(jié)構(gòu)的Darknet-53作為骨干網(wǎng)絡(luò),雖然具有比 GSSD 高的檢測精度,但模型參數(shù)量較大,檢測速度不能滿足視頻檢測的需求。
在煙火數(shù)據(jù)集上,GSSD算法的mAP比SSD、YOLOv2和YOLOv3分別提高了4.8%、6.8% 和0.9%。在4種算法中,GSSD對煙火的檢測精度最高,在檢測速度和模型的參數(shù)量方面具有較大優(yōu)勢,實(shí)驗證明了GSSD算法在煙火檢測中的可行性。GSSD與SSD算法對煙火數(shù)據(jù)集可視化檢測對比如圖7所示。

4 結(jié) 語
本文針對視頻煙火難以高精度實(shí)時檢測和模型參數(shù)量較大的問題,提出了GSSD算法。GSSD算法主要對SSD進(jìn)行了骨干網(wǎng)絡(luò)改進(jìn)和多尺度特征融合改進(jìn)。通過以上改進(jìn),GSSD 算法對視頻煙火檢測的性能得到了提高。
在PASCAL VOC 2012數(shù)據(jù)集上GSSD算法達(dá)到了86.7%的mAP,參數(shù)量為14.6 M,F(xiàn)PS為 59。與主流目標(biāo)檢測算法相比,GSSD算法具有更好的檢測效果,在縮小模型尺寸的同時,檢測精度與速度也有良好的表現(xiàn)。在自行設(shè)計的煙火數(shù)據(jù)集上,GSSD算法比SSD 算法的mAP提高了 4.8%,達(dá)到80.2%,參數(shù)量減少了84.64%,降為14.6 M,檢測速度提升了1.9 倍,F(xiàn)PS達(dá)到了59。下一步將在網(wǎng)絡(luò)模型改進(jìn)的基礎(chǔ)上,針對類火類煙目標(biāo)的檢測進(jìn)行研究,以提高算法的魯棒性。
參考文獻(xiàn)
[1] 李國輝,郭歌,趙力增 . 不同起火原因火災(zāi)時空聚集性研究 [J].消防科學(xué)與技術(shù),2019,38(1):141-145.
[2] 張思祥,甘凱,周圍 . 提高火災(zāi)煙霧傳感器檢測精度的方法 [J].傳感器與微系統(tǒng),2021,40(1):151-153.
[3] 胡燕,王慧琴,張國飛,等 . 基于視頻圖像的遠(yuǎn)程火災(zāi)探測系統(tǒng)[J]. 計算機(jī)工程,2013,39(3):279-284.
[4] 賈陽,林高華,王進(jìn)軍,等 . 基于顯著性檢測和高斯混合模型的早期視頻煙霧分割算法 [J]. 計算機(jī)工程,2016,42(2):206-209.
[5] 梅建軍,張為 . 基于 ViBe 與機(jī)器學(xué)習(xí)的早期火災(zāi)檢測算法 [J]. 光學(xué)學(xué)報,2018,38(7):60-67.
[6] 苗續(xù)芝,陳偉,畢方明,等 . 基于改進(jìn) FOA-SVM 的礦井火災(zāi)圖像識別 [J]. 計算機(jī)工程,2019,45(4):267-274.
[7] LI P,ZHAO W. Image fire detection algorithms based onconvolutional neural networks [J]. Case studies in thermalengineering,2020,19:100625.
[8] QIN Y Y,CAO J T,JI X F. Fire Detection method based ondepthwise separable convolution and YOLOv3 [J]. Internationaljournal of automation and computing,2021,18(2):300-310.
[9] Nguyen A Q,Nguyen H T,Tran V C,et al. A Visual Real-timeFire Detection using Single Shot MultiBox Detector for UAV-basedFire Surveillance [C]// 2020 IEEE Eighth International Conference onCommunications and Electronics (ICCE). IEEE,2021: 338-343.
[10] 楊帆,吳韶波 . 基于 SSD 的目標(biāo)車輛檢測算法研究 [J]. 物聯(lián)網(wǎng)技術(shù),2021,11(6):19-22.
[11] Han K,Wang Y,Tian Q,et al. Ghostnet: More features fromcheap operations [C]// Proceedings of the IEEE/CVF Conference onComputer Vision and Pattern Recognition. 2020:1580-1589.
[12] SIMONYAN K,ZISSERMAN A. Very deep convolutionalnetworks for large-scale image recognition [Z]. arXiv preprint arXiv:1409.1556,2014.
[13] 張海濤,張夢 . 引入通道注意力機(jī)制的 SSD 目標(biāo)檢測算法 [J].計算機(jī)工程,2020,46(8):264-270.
[14] HOWARD A G,ZHU M,CHEN B,et al. Mobilenets:Efficientconvolutional neural networks for mobile vision applications [Z].arXiv preprint arXiv:1704.04861,2017.
[15] 趙洋,許軍 . 基于 MobileNetV2 與樹莓派的人臉識別系統(tǒng) [J]. 計算機(jī)系統(tǒng)應(yīng)用,2021,30(8):67-72.
[16] H o w a r d A,Sandler M,Chu G,e t a l . S e a r c h i n g f o rmobilenetv3[C]// Proceedings of the IEEE/CVF InternationalConference on Computer Vision. 2019: 1314-1324.
[17] Zhang X,Zhou X,Lin M,et al. Shufflenet: An extremelyefficient convolutional neural network for mobile devices [C]//Proceedings of the IEEE conference on computer vision and patternrecognition. 2018: 6848-6856.
[18] Ma N,Zhang X,Zheng H T,et al. Shufflenet v2: Practicalguidelines forefficient cnn architecture design [C]// Proceedings of theEuropean conference on computer vision (ECCV). 2018: 116-131.
[19] 余洪山,郭豐,郭林峰,等 . 融合改進(jìn) SuperPoint 網(wǎng)絡(luò)的魯棒單目視覺慣性 SLAM[J]. 儀器儀表學(xué)報,2021,42(1):116-126.
[20] YU F,KOLTUN V. Multi-scale context aggregation by dilatedconvolutions [Z]. arXiv preprint arXiv:1511.07122,2015.
[21] Redmon J,F(xiàn)arhadi A. YOLO9000: better,faster,stronger [C]//Proceedings of the IEEE conference on computer vision and patternrecognition. 2017: 7263-7271.
[22] Redmon J,F(xiàn)arhadi A. Yolov3: An incremental improvement [Z].arXiv preprint arXiv:1804.02767,2018.
作者簡介:趙 洋(1974—),男,博士,講師,研究方向為圖像處理與計算機(jī)視覺。 王藝鋼(1997—),男,碩士,研究方向為圖像處理。 靳永強(qiáng)(1998—),男,碩士,研究方向為圖像處理。 華 丹(1995—),女,碩士,研究方向為圖像處理。
編輯:黃飛
?













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論