 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
無線傳感器網(wǎng)絡(luò)是由分布在給定區(qū)域內(nèi)大量傳感器節(jié)點(diǎn)以無線自組織多跳的通信方式構(gòu)成的網(wǎng)絡(luò)系統(tǒng),目前在環(huán)境監(jiān)測(cè)保護(hù)、樓宇監(jiān)控、家庭安防、醫(yī)療護(hù)理、目標(biāo)跟蹤、軍事等領(lǐng)域已獲得了廣泛的應(yīng)用。
1 CC2430芯片介紹
CC2430芯片是TI/Chipcon公司生產(chǎn)的真正意義上的片上系統(tǒng)(SOC)級(jí)解決方案,它集增強(qiáng)型工業(yè)標(biāo)準(zhǔn)8051核心、優(yōu)秀的射頻芯片CC24 20、強(qiáng)大的外圍資源于一體。集成的外設(shè)資源主要有DMA、定時(shí)/計(jì)數(shù)器、看門狗定時(shí)器、AES-128協(xié)處理器、8通道8~14位ADC、USART、休眠模式定時(shí)器、復(fù)位電路及21個(gè)可編程I/O,支持IEEE802.15.4和ZigBee協(xié)議。
CC2430芯片具有性能高、功耗低、接收靈敏度高、抗干擾性強(qiáng)、硬件CSMA/CA支持、數(shù)字化RSSI/LQI支持、DMA支持等特點(diǎn),支持無線數(shù)據(jù)傳輸率高達(dá)250 kbps.
2 TinyOS系統(tǒng)與nesC語言
由于無線傳感器網(wǎng)絡(luò)的特殊性,需要操作系統(tǒng)能夠高效地使用傳感器節(jié)點(diǎn)的有限內(nèi)存、低功耗處理器、多樣傳感器、有限的電源,并且能對(duì)各種特定應(yīng)用提供最大的支持。
基于此,UC Berkeley研究人員專為嵌入式無線傳感器網(wǎng)絡(luò)開發(fā)出TinyOS系統(tǒng),目前已經(jīng)成為無線傳感器網(wǎng)絡(luò)領(lǐng)域事實(shí)上的標(biāo)準(zhǔn)平臺(tái)。 TinyOS系統(tǒng)具有組件化編程、事件驅(qū)動(dòng)模式、輕量級(jí)線程技術(shù)、主動(dòng)消息通信技術(shù)等特點(diǎn)。TinyOS采用組件架構(gòu)方式,快速實(shí)現(xiàn)各種應(yīng)用,組件包括網(wǎng)絡(luò)協(xié)議、分布式服務(wù)、傳感器驅(qū)動(dòng)以及數(shù)據(jù)獲取工具等,一個(gè)完整的應(yīng)用系統(tǒng)通過組合不同的組件來實(shí)現(xiàn)。采用事件驅(qū)動(dòng)的運(yùn)行模型,可以處理高并發(fā)性的事件,并實(shí)現(xiàn)節(jié)能。
TinyOS應(yīng)用程序通常由頂層配件、核心處理模塊和其它組件構(gòu)成。每個(gè)應(yīng)用程序有且僅有一個(gè)頂層配件,組件間通過接口進(jìn)行連接通信,下層組件提供接口,通過provideinterface interfaceName來聲明,上層組件使用接口,通過useinterface interfaceName來聲明。接口提供兩類函數(shù),分別是命令(command)函數(shù)與事件(event)函數(shù),上層組件向下層組件發(fā)出命令,啟動(dòng)下層組件的功能:下層組件完成相應(yīng)的功能后向上層組件報(bào)告事件。應(yīng)用程序總體框架如圖1所示。

TinyOS系統(tǒng)本身以及應(yīng)用程序都是采用nesC語言編寫,nesC語言是對(duì)C語言的擴(kuò)展,具有類似于C語言的語法,但支持TinyOS的并發(fā)模型,同時(shí)具有組件化機(jī)制,能夠與其他組件連接在一起從而形成一個(gè)魯棒性很好的嵌入式系統(tǒng)。nesC語言把組件化/模塊化的編程思想和基于事件驅(qū)動(dòng)的執(zhí)行模型緊密結(jié)合起來。應(yīng)用nesC語言能夠更快速方便地編寫基于TinyOS的應(yīng)用程序。
3 RSSI定位原理
RSSI全稱Received Signal Strength Indicator(接收信號(hào)強(qiáng)度指示),是一種基于距離的定位算法。RSSI原理是已知發(fā)射節(jié)點(diǎn)的發(fā)射信號(hào)強(qiáng)度,接收節(jié)點(diǎn)根據(jù)接收信號(hào)的強(qiáng)度,計(jì)算出信號(hào)在傳播過程中的損耗,利用理論和經(jīng)驗(yàn)?zāi)P蛯鬏敁p耗轉(zhuǎn)化為距離,再根據(jù)接收節(jié)點(diǎn)的已知位置利用三邊測(cè)量法計(jì)算出發(fā)射節(jié)點(diǎn)的位置。由于該方法不需要額外的硬件設(shè)備,是一種低功耗廉價(jià)的測(cè)距技術(shù),因此在很多項(xiàng)目中得到了廣泛的應(yīng)用。
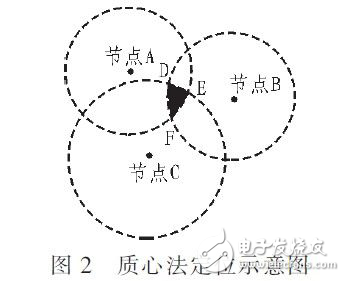
本文在RSSI定位基礎(chǔ)上使用質(zhì)心算法提高定位精度,如圖2所示,最后求得的盲節(jié)點(diǎn)坐標(biāo)為點(diǎn)D、E和F組成的三角形的質(zhì)心。
4 定位算法在TinyOS中的實(shí)現(xiàn)
根據(jù)RSSI測(cè)距原理,要確定盲節(jié)點(diǎn)的位置,至少需要三個(gè)錨節(jié)點(diǎn)(已知位置的接收節(jié)點(diǎn)),并需要一個(gè)匯聚節(jié)點(diǎn)來傳輸各錨節(jié)點(diǎn)的RSSI寄存器值到PC機(jī),最終通過串口調(diào)試助手來顯示結(jié)果并進(jìn)一步定位盲節(jié)點(diǎn)坐標(biāo)。下面分別介紹移動(dòng)盲節(jié)點(diǎn)、靜態(tài)錨節(jié)點(diǎn)以及匯聚節(jié)點(diǎn)的實(shí)現(xiàn)流程。
1 CC2430芯片介紹
CC2430芯片是TI/Chipcon公司生產(chǎn)的真正意義上的片上系統(tǒng)(SOC)級(jí)解決方案,它集增強(qiáng)型工業(yè)標(biāo)準(zhǔn)8051核心、優(yōu)秀的射頻芯片CC24 20、強(qiáng)大的外圍資源于一體。集成的外設(shè)資源主要有DMA、定時(shí)/計(jì)數(shù)器、看門狗定時(shí)器、AES-128協(xié)處理器、8通道8~14位ADC、USART、休眠模式定時(shí)器、復(fù)位電路及21個(gè)可編程I/O,支持IEEE802.15.4和ZigBee協(xié)議。
CC2430芯片具有性能高、功耗低、接收靈敏度高、抗干擾性強(qiáng)、硬件CSMA/CA支持、數(shù)字化RSSI/LQI支持、DMA支持等特點(diǎn),支持無線數(shù)據(jù)傳輸率高達(dá)250 kbps.
2 TinyOS系統(tǒng)與nesC語言
由于無線傳感器網(wǎng)絡(luò)的特殊性,需要操作系統(tǒng)能夠高效地使用傳感器節(jié)點(diǎn)的有限內(nèi)存、低功耗處理器、多樣傳感器、有限的電源,并且能對(duì)各種特定應(yīng)用提供最大的支持。
基于此,UC Berkeley研究人員專為嵌入式無線傳感器網(wǎng)絡(luò)開發(fā)出TinyOS系統(tǒng),目前已經(jīng)成為無線傳感器網(wǎng)絡(luò)領(lǐng)域事實(shí)上的標(biāo)準(zhǔn)平臺(tái)。 TinyOS系統(tǒng)具有組件化編程、事件驅(qū)動(dòng)模式、輕量級(jí)線程技術(shù)、主動(dòng)消息通信技術(shù)等特點(diǎn)。TinyOS采用組件架構(gòu)方式,快速實(shí)現(xiàn)各種應(yīng)用,組件包括網(wǎng)絡(luò)協(xié)議、分布式服務(wù)、傳感器驅(qū)動(dòng)以及數(shù)據(jù)獲取工具等,一個(gè)完整的應(yīng)用系統(tǒng)通過組合不同的組件來實(shí)現(xiàn)。采用事件驅(qū)動(dòng)的運(yùn)行模型,可以處理高并發(fā)性的事件,并實(shí)現(xiàn)節(jié)能。
TinyOS應(yīng)用程序通常由頂層配件、核心處理模塊和其它組件構(gòu)成。每個(gè)應(yīng)用程序有且僅有一個(gè)頂層配件,組件間通過接口進(jìn)行連接通信,下層組件提供接口,通過provideinterface interfaceName來聲明,上層組件使用接口,通過useinterface interfaceName來聲明。接口提供兩類函數(shù),分別是命令(command)函數(shù)與事件(event)函數(shù),上層組件向下層組件發(fā)出命令,啟動(dòng)下層組件的功能:下層組件完成相應(yīng)的功能后向上層組件報(bào)告事件。應(yīng)用程序總體框架如圖1所示。
TinyOS系統(tǒng)本身以及應(yīng)用程序都是采用nesC語言編寫,nesC語言是對(duì)C語言的擴(kuò)展,具有類似于C語言的語法,但支持TinyOS的并發(fā)模型,同時(shí)具有組件化機(jī)制,能夠與其他組件連接在一起從而形成一個(gè)魯棒性很好的嵌入式系統(tǒng)。nesC語言把組件化/模塊化的編程思想和基于事件驅(qū)動(dòng)的執(zhí)行模型緊密結(jié)合起來。應(yīng)用nesC語言能夠更快速方便地編寫基于TinyOS的應(yīng)用程序。
3 RSSI定位原理
RSSI全稱Received Signal Strength Indicator(接收信號(hào)強(qiáng)度指示),是一種基于距離的定位算法。RSSI原理是已知發(fā)射節(jié)點(diǎn)的發(fā)射信號(hào)強(qiáng)度,接收節(jié)點(diǎn)根據(jù)接收信號(hào)的強(qiáng)度,計(jì)算出信號(hào)在傳播過程中的損耗,利用理論和經(jīng)驗(yàn)?zāi)P蛯鬏敁p耗轉(zhuǎn)化為距離,再根據(jù)接收節(jié)點(diǎn)的已知位置利用三邊測(cè)量法計(jì)算出發(fā)射節(jié)點(diǎn)的位置。由于該方法不需要額外的硬件設(shè)備,是一種低功耗廉價(jià)的測(cè)距技術(shù),因此在很多項(xiàng)目中得到了廣泛的應(yīng)用。
本文在RSSI定位基礎(chǔ)上使用質(zhì)心算法提高定位精度,如圖2所示,最后求得的盲節(jié)點(diǎn)坐標(biāo)為點(diǎn)D、E和F組成的三角形的質(zhì)心。
4 定位算法在TinyOS中的實(shí)現(xiàn)
根據(jù)RSSI測(cè)距原理,要確定盲節(jié)點(diǎn)的位置,至少需要三個(gè)錨節(jié)點(diǎn)(已知位置的接收節(jié)點(diǎn)),并需要一個(gè)匯聚節(jié)點(diǎn)來傳輸各錨節(jié)點(diǎn)的RSSI寄存器值到PC機(jī),最終通過串口調(diào)試助手來顯示結(jié)果并進(jìn)一步定位盲節(jié)點(diǎn)坐標(biāo)。下面分別介紹移動(dòng)盲節(jié)點(diǎn)、靜態(tài)錨節(jié)點(diǎn)以及匯聚節(jié)點(diǎn)的實(shí)現(xiàn)流程。
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 使用ZigBee協(xié)議利用CC2430完成分布式溫度測(cè)量系統(tǒng)的設(shè)計(jì)方案說明 7次下載
- TinyOS下CC2430單片機(jī)的ADC使用方法詳細(xì)說明
- CC2430 SoC系統(tǒng)芯片的數(shù)據(jù)手冊(cè)免費(fèi)下載 10次下載
- 用于IEEE的CC2430系統(tǒng)片上解決方案的軟件例子的詳細(xì)資料概述 2次下載
- CC2491射頻前端與CC2430的TI-MAC和Z堆棧改進(jìn) 5次下載
- CC2430用戶指南(中文) 30次下載
- 基于CC2430的Zigbee無線通信設(shè)計(jì) 16次下載
- 基于cc2430的環(huán)境參數(shù)監(jiān)測(cè)和人員定位_臧峰 2次下載
- 基于CC2430的無線傳感器網(wǎng)絡(luò)的實(shí)現(xiàn) 13次下載
- 基于TinyOS的CC2430 RSSI定位的設(shè)計(jì) 121次下載
- 基于TinyOS的CC2430無線數(shù)據(jù)收發(fā)設(shè)計(jì)
- 基于CC2430的串口無線模塊的設(shè)計(jì)
- CC2430源代碼及視頻教程1.0
- 基于ZigBee技術(shù)的射頻芯片CC2430
- 基于CC2430的穿戴式呼吸檢測(cè)模塊的研制
- Linux操作系統(tǒng)中如何按下PCIe的復(fù)位鍵 1687次閱讀
- 深度解析全球操作系統(tǒng)格局 1268次閱讀
- 基于優(yōu)先級(jí)調(diào)度的嵌入式實(shí)時(shí)操作系統(tǒng)內(nèi)核詳解(下) 936次閱讀
- TinyOS操作系統(tǒng)的工作原理、應(yīng)用技術(shù)及應(yīng)用分析 6386次閱讀
- 基于pSoSystem操作系統(tǒng)實(shí)現(xiàn)通用網(wǎng)絡(luò)代碼框架的設(shè)計(jì) 2126次閱讀
- 華大電子Nos- Wlan模塊實(shí)現(xiàn)應(yīng)用系統(tǒng)的移植操作 2089次閱讀
- 通過采用CC2430芯片實(shí)現(xiàn)公交火災(zāi)快速定位系統(tǒng)設(shè)計(jì)解決方案 1206次閱讀
- 基于nRF24E1的傳感器網(wǎng)絡(luò)系統(tǒng)構(gòu)建及TinyOS程序設(shè)計(jì) 2200次閱讀
- 基于Linux等不同操作系統(tǒng)實(shí)現(xiàn)異構(gòu)系統(tǒng)的設(shè)計(jì) 2633次閱讀
- 采用CC1101微功耗無線收發(fā)模塊,在通信過程中直接讀取RSSI值 9538次閱讀
- 嵌入式操作系統(tǒng)是什么_嵌入式操作系統(tǒng)有哪些 2w次閱讀
- 無線鼠標(biāo)系統(tǒng)電路設(shè)計(jì)方案大全(三款電路設(shè)計(jì)原理詳細(xì)) 6.2w次閱讀
- 簡要介紹了操作系統(tǒng)虛擬化的概念,以及實(shí)現(xiàn)操作系統(tǒng)虛擬化的技術(shù) 1.3w次閱讀
- 基于FreeRTOS的嵌入式實(shí)時(shí)操作系統(tǒng)的原理和實(shí)現(xiàn) 6714次閱讀
- 國產(chǎn)嵌入式操作系統(tǒng)下觸摸屏的實(shí)現(xiàn) 2918次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1AN158 GD32VW553 Wi-Fi開發(fā)指南
- 1.51MB | 2次下載 | 免費(fèi)
- 2嵌入式軟件開發(fā)符合ISO 26262 功能安全標(biāo)準(zhǔn)
- 1.61 MB | 1次下載 | 免費(fèi)
- 3AN148 GD32VW553射頻硬件開發(fā)指南
- 2.07MB | 1次下載 | 免費(fèi)
- 4PZT驅(qū)動(dòng)開關(guān)電路
- 0.09 MB | 1次下載 | 免費(fèi)
- 5模擬電路仿真實(shí)現(xiàn)
- 2.94MB | 1次下載 | 免費(fèi)
- 6PCB繪制基礎(chǔ)知識(shí)
- 2.44MB | 1次下載 | 免費(fèi)
- 7EE-38:ADSP-2181 IDMA端口-周期竊取時(shí)序
- 75.0KB | 次下載 | 免費(fèi)
- 8EE-82:使用ADSP-2181 DSP的IO空間對(duì)另一個(gè)ADSP-2181進(jìn)行IDMA引導(dǎo)
- 86.86KB | 次下載 | 免費(fèi)
本月
- 1ADI高性能電源管理解決方案
- 2.43 MB | 452次下載 | 免費(fèi)
- 2免費(fèi)開源CC3D飛控資料(電路圖&PCB源文件、BOM、
- 5.67 MB | 139次下載 | 1 積分
- 3基于STM32單片機(jī)智能手環(huán)心率計(jì)步器體溫顯示設(shè)計(jì)
- 0.10 MB | 132次下載 | 免費(fèi)
- 4美的電磁爐維修手冊(cè)大全
- 1.56 MB | 24次下載 | 5 積分
- 5如何正確測(cè)試電源的紋波
- 0.36 MB | 19次下載 | 免費(fèi)
- 6感應(yīng)筆電路圖
- 0.06 MB | 10次下載 | 免費(fèi)
- 7LZC3106G高性能諧振控制器中文手冊(cè)
- 1.29 MB | 9次下載 | 1 積分
- 8萬用表UT58A原理圖
- 0.09 MB | 9次下載 | 5 積分
總榜
- 1matlab軟件下載入口
- 未知 | 935121次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關(guān)降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設(shè)計(jì)
- 1.48MB | 420062次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233088次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191367次下載 | 10 積分
- 5十天學(xué)會(huì)AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183335次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81581次下載 | 10 積分
- 7Keil工具M(jìn)DK-Arm免費(fèi)下載
- 0.02 MB | 73810次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論