 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
介紹
我們的目標(biāo)是創(chuàng)建一個(gè)自主的室內(nèi)機(jī)器人,它使用不同的控制策略來處理它的運(yùn)動(dòng)。在這個(gè)項(xiàng)目中,我們提出了一種解決方案,它對(duì)傳感器進(jìn)行建模并實(shí)施模型預(yù)測(cè)控制 (MPC)。
關(guān)于 MPC 控制的一些話: 模型預(yù)測(cè)控制 (MPC) 是一種眾所周知的用于解決在線優(yōu)化問題的控制策略,廣泛用于自動(dòng)駕駛汽車應(yīng)用。MPC 的計(jì)算成本高且資源消耗大,尤其是當(dāng)涉及到嵌入式計(jì)算平臺(tái)的有限資源時(shí),例如片上系統(tǒng) (SoC) 和現(xiàn)場(chǎng)可編程門陣列 (FPGA) 平臺(tái)。最近,機(jī)器學(xué)習(xí)(ML)在減少執(zhí)行時(shí)間和資源消耗方面已成為經(jīng)典控制系統(tǒng)的有效替代方案。模型預(yù)測(cè)控制 (MPC) 是最常用的控制策略之一,因?yàn)樗軌蚪鉀Q在線優(yōu)化問題并處理軟約束和硬約束。但是,對(duì)于復(fù)雜的高非線性系統(tǒng),MPC的實(shí)現(xiàn)是一個(gè)很大的挑戰(zhàn);
深度神經(jīng)網(wǎng)絡(luò)被認(rèn)為是一種自我優(yōu)化的方法,因?yàn)樗軌蚋鶕?jù)提供的信息優(yōu)化其行為,這使得 DNN 適用于復(fù)雜的動(dòng)態(tài)系統(tǒng)。使用 Matlab Simulink 和 MPC 工具,我們發(fā)現(xiàn)這會(huì)讓人頭疼,因?yàn)槲覀兪褂玫氖切⌒?FPGA。出于這個(gè)原因,在米什科爾茨大學(xué),我們創(chuàng)建了一個(gè) DNN 工具,它從給定的輸入數(shù)據(jù)創(chuàng)建一個(gè)基于給定數(shù)據(jù)中的 System Generator 庫元素的可參數(shù)化 DNN 網(wǎng)絡(luò)。
一個(gè)傳統(tǒng)的 MPC 控制器如圖 1 所示。MPC 控制器的預(yù)測(cè)策略是在預(yù)測(cè)范圍內(nèi)執(zhí)行的,它代表了控制器期待未來的下一個(gè) P 時(shí)間步長(zhǎng)。MPC 控制器模擬幾個(gè)未來場(chǎng)景,優(yōu)化器根據(jù)成本函數(shù)選擇最佳場(chǎng)景,成本函數(shù)代表參考目標(biāo)和預(yù)測(cè)輸出之間的誤差。最優(yōu)方案對(duì)應(yīng)于最小成本函數(shù)。
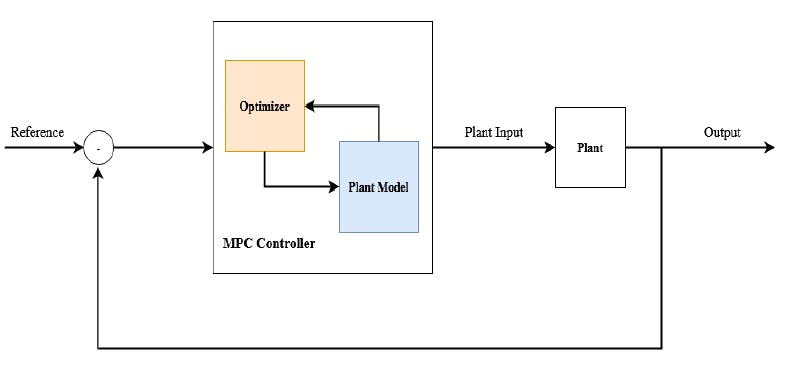
該控制器計(jì)算量大,因?yàn)樗鉀Q了每個(gè)時(shí)間步的在線優(yōu)化問題,這需要高計(jì)算能力和大內(nèi)存。計(jì)算負(fù)載和高資源消耗使 MPC 在有限資源上的實(shí)現(xiàn)成為一個(gè)巨大的挑戰(zhàn)。
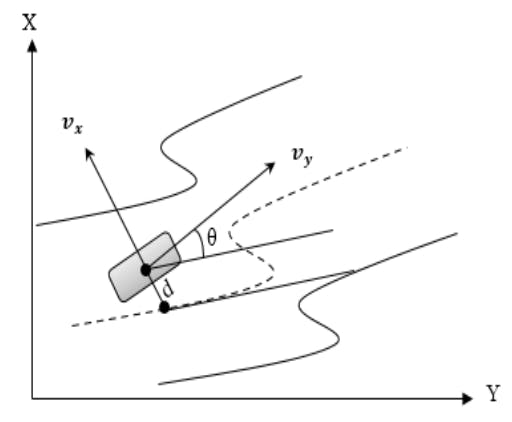
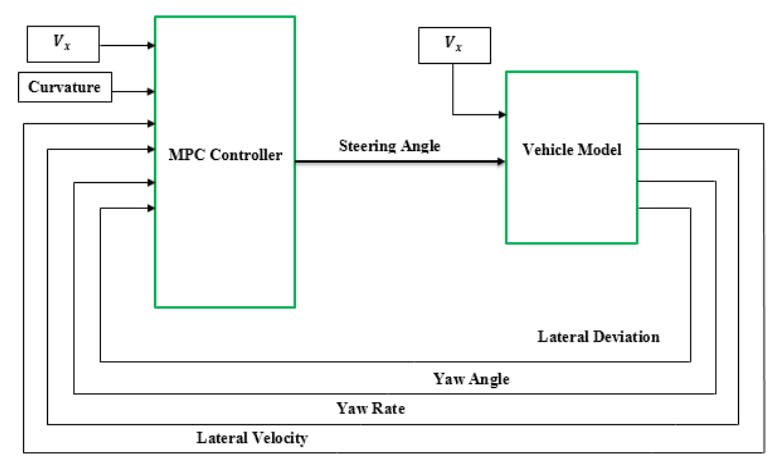
設(shè)計(jì)MPC模型的第一步是確定車輛內(nèi)部模型的輸入輸出信號(hào),第二步是設(shè)置參數(shù)和確定約束條件。操縱變量(轉(zhuǎn)向角 δ)和擾動(dòng)(vx ρ)被確定為輸入信號(hào),而橫向速度 vy、橫向偏差 d、偏航角 θ 和偏航率 ω 被確定為輸出信號(hào)(見圖 2)。
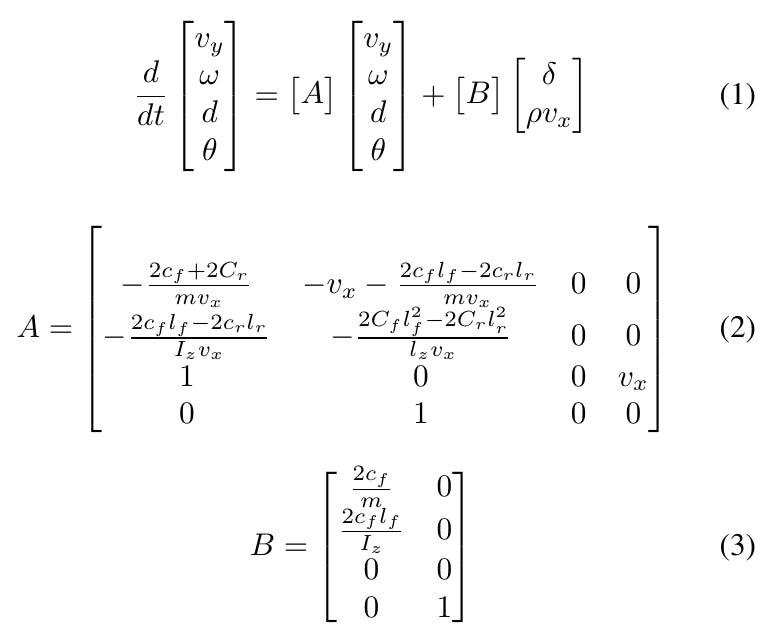
模型方程如下:
約束條件如下確定:轉(zhuǎn)向角在 [-1.04, 1.04] rad 范圍內(nèi),偏航角速率在 [-0.26, 0.26] rad 范圍內(nèi)。在設(shè)計(jì)過程中保持這些參數(shù),直到獲得滿意的行為。MPC 和工廠模型的總體設(shè)計(jì)如圖 4 所示。
深度神經(jīng)網(wǎng)絡(luò) IP 程序的自動(dòng)生成
設(shè)計(jì)步驟如下:
- 首先制作了傳統(tǒng)的MPC控制器;驗(yàn)證和測(cè)試 MPC 設(shè)計(jì);深度神經(jīng)網(wǎng)絡(luò)模型設(shè)計(jì),生成數(shù)據(jù)集;訓(xùn)練 DNN 模型;驗(yàn)證和測(cè)試 DNN 模型;(這些步驟對(duì)于每個(gè)新的 DNN 都是特定的,因此這里不介紹這些步驟);
- 下一步是運(yùn)行IP工具生成器(見附件中的工具);
- 運(yùn)行仿真和硬件在環(huán)仿真(見模型和隨附的初始化文件);
- FPGA 在硬件中的部署和測(cè)試。
- 為 KRIA SOM KV260 創(chuàng)建自適應(yīng)硬件平臺(tái)(參見教程https://github.com/Xilinx/Vitis-Tutorials/tree/2021.2/Vitis_??Platform_Creation/Design_Tutorials/01-Edge-KV260)
- 將 AXI IP DNN 導(dǎo)入 Vivado 或 Vitis(在編輯和提交項(xiàng)目時(shí),我們沒有收到 Xilinx 的反饋如何在 Vitis 中導(dǎo)入翻譯后的項(xiàng)目)
對(duì)于深度神經(jīng)網(wǎng)絡(luò) IP 的自動(dòng)生成,創(chuàng)建的 DNN 工具(見附件 DNN 工具 IP 生成器)。
首先使用 DNN 工具創(chuàng)建 DNN。一般而言,將使用該工具的人應(yīng)提供以下參數(shù):
該工具的輸入如下:
- 每層的神經(jīng)元數(shù)量
- 精度(浮點(diǎn)或 FIX16 或 FIX8)
- 權(quán)重
- 偏見
輸出是在 Matlab Simulink 中生成的 DNN IP。
備注:該工具正在工作,但應(yīng)考慮針對(duì)不同的 AMD Xilinx 平臺(tái)進(jìn)行一些優(yōu)化和修飾。這是 PL(可編程邏輯)包含的神經(jīng)元和 DSP 元素?cái)?shù)量的函數(shù)。該工具已針對(duì) KC705 板和 Kria KV260 SOM 成功測(cè)試。
首先加載DNN_Generator.m文件并根據(jù)需要進(jìn)行編輯:
%Edit model_parameters_here...神經(jīng)元計(jì)數(shù) = [6 20 10 10 1]; % 7 層中每一層的神經(jīng)元數(shù)量%starting model... init;
然后運(yùn)行。該模型已創(chuàng)建并可用于自己的目的。
仿真/硬件在環(huán)仿真 (HIL)
在 Simulink 環(huán)境下進(jìn)行了仿真,取得了不錯(cuò)的效果。不幸的是,對(duì)于 Kria KV260 模塊,系統(tǒng)生成器不允許我們進(jìn)行硬件在環(huán)仿真。我們使用 KC705 板為生成的 DNN 制作了 HIL。使用 KV260 仿真和使用 KC705 的 HIL 獲得的結(jié)果相似。
如下圖(圖 5)所示創(chuàng)建的 Vivado 項(xiàng)目已成功翻譯并導(dǎo)出到 Vitis。在 Vitis 軟件中,我們甚至無法運(yùn)行“hello world”項(xiàng)目。Vitis 報(bào)告“平臺(tái)無法識(shí)別。
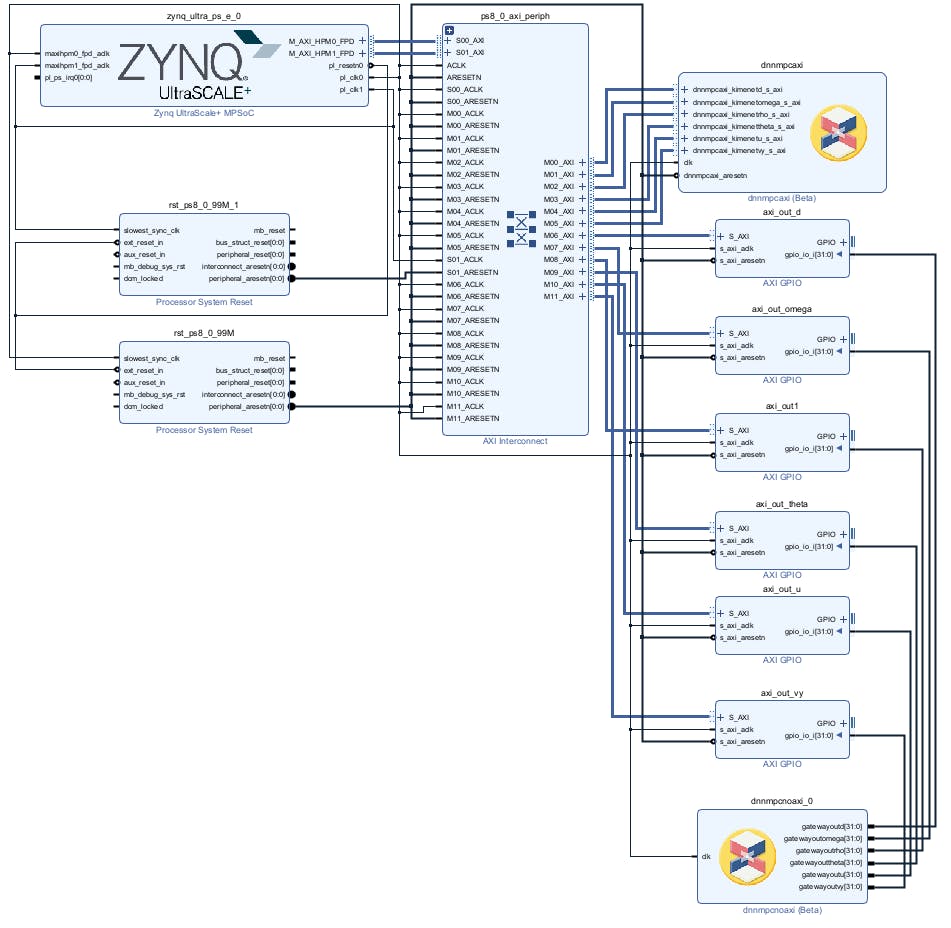
在圖中(圖 5)可以觀察到,我們創(chuàng)建了兩個(gè) IP-s,一個(gè)與 AXI 兼容,一個(gè)沒有 AXI 接口。我們的經(jīng)驗(yàn)是,沒有 AXI 接口的設(shè)備在 KC705 平臺(tái)上工作得更正確。
只是為了在下圖中顯示一個(gè)示例,我們展示了 KC705 模塊的結(jié)果,因?yàn)槲覀儫o法在 KV260 上進(jìn)行 HIL 和測(cè)試。
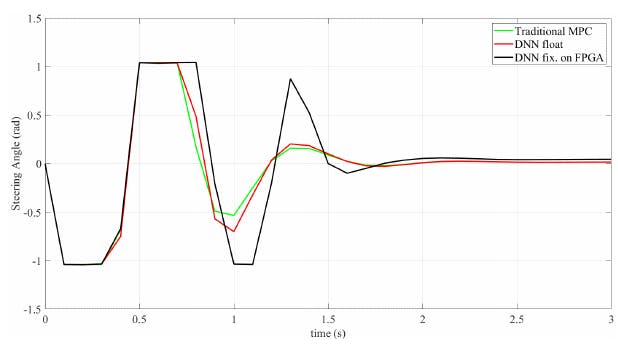
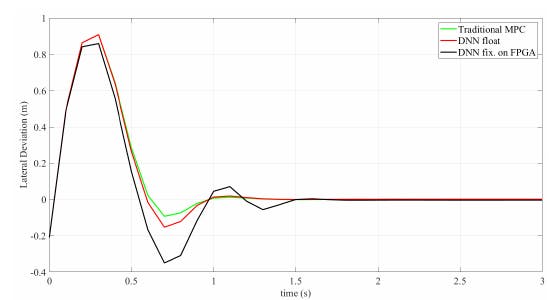
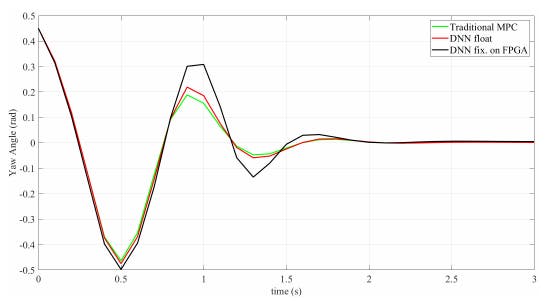
結(jié)果
創(chuàng)建的 DNN_tool 可用于實(shí)現(xiàn)任何 DNN 網(wǎng)絡(luò),并且可以在 Simulink 中進(jìn)行測(cè)試。模擬、HIL 和實(shí)施可以在 FGPA 中完成。
創(chuàng)建的工具可供任何人免費(fèi)使用。
不幸的是,我們無法在 Kria 板上測(cè)試模型預(yù)測(cè)控制,但可能在不久的將來我們會(huì)在 AMD-Xilinx 工作人員的幫助下解決這個(gè)問題。
我們面臨的主要問題是如何在不使用 RTL 內(nèi)核向?qū)У那闆r下將 DNN MPC 模型集成到 Vitis。
評(píng)論
(對(duì)于具有高級(jí)知識(shí)的人)構(gòu)建一個(gè)項(xiàng)目需要多長(zhǎng)時(shí)間?
答案是:1 小時(shí)來訓(xùn)練和準(zhǔn)備 DNN。5 分鐘安裝 DNN 工具并生成 IP。10-20 分鐘通過導(dǎo)入 IP 并進(jìn)行所有必要的設(shè)置來創(chuàng)建 Vivado 項(xiàng)目。5-30 分鐘(取決于 DNN 的大小和優(yōu)化策略)創(chuàng)建比特流。10 分鐘遷移到 Vitis 并運(yùn)行項(xiàng)目。30 - 60 分鐘編寫 C 程序并測(cè)試結(jié)果。
我們花了多長(zhǎng)時(shí)間構(gòu)建 DNN 工具并在不同平臺(tái)上測(cè)試該工具?
答案是:5個(gè)月每天工作3-5小時(shí)左右。
- 通用RFID生成器 1次下載
- 迷你自主機(jī)器人開源分享
- 自主機(jī)器人開源項(xiàng)目
- MIF文件生成器下載 18次下載
- AN-113:精密坡道生成器
- 基于生成器的圖像分類對(duì)抗樣本生成模型 2次下載
- Xilinx LogiCORE IP塊內(nèi)存生成器的產(chǎn)品指南 22次下載
- 自主機(jī)器人足球系統(tǒng)的通信機(jī)制 0次下載
- 自主機(jī)器人避障方法研究 0次下載
- 代碼生成器的應(yīng)用 0次下載
- 智能機(jī)器人的適應(yīng)自主Agents的建模 10次下載
- LED段碼生成器 98次下載
- 漢語句子聯(lián)想生成器
- UOC III系列器件 DMP生成器 (DMP Create
- pim卡資料生成器
- 如何使用PLC控制機(jī)器人 1882次閱讀
- TSMaster報(bào)文發(fā)送的信號(hào)生成器操作說明 1063次閱讀
- 個(gè)性化地定制自己的uvm代碼生成器模板和腳本 2142次閱讀
- 代碼生成器配置和軟件UART的實(shí)現(xiàn) 1596次閱讀
- 如何使用DonkeyCar平臺(tái)構(gòu)建一個(gè)自主機(jī)器人 2296次閱讀
- 利用雷達(dá)目標(biāo)生成器測(cè)試整個(gè)雷達(dá)系統(tǒng)的方法介紹 2691次閱讀
- 機(jī)器人控制系統(tǒng)分類_機(jī)器人控制系統(tǒng)有哪些 2.6w次閱讀
- 機(jī)器人控制器有哪些類型_機(jī)器人控制器發(fā)展 1.2w次閱讀
- 移動(dòng)機(jī)器人控制系統(tǒng)設(shè)計(jì)與仿真 3640次閱讀
- 仙知機(jī)器人自主研發(fā)用于移動(dòng)機(jī)器人應(yīng)用專業(yè)級(jí)客戶端軟件Roboshop 6250次閱讀
- 帶你一起學(xué)習(xí)徹底搞懂Python生成器 2775次閱讀
- 盤點(diǎn)機(jī)器人傳感器的類型及其作用 7951次閱讀
- 如何提高生成器G樣本質(zhì)量的新方法 6147次閱讀
- 關(guān)于機(jī)器人傳感器的種類介紹 1.3w次閱讀
- 機(jī)器人自主充電座PCB圖和自主充電原理圖 9294次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊(cè)
- 1.06 MB | 532次下載 | 免費(fèi)
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費(fèi)
- 3TC358743XBG評(píng)估板參考手冊(cè)
- 1.36 MB | 330次下載 | 免費(fèi)
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費(fèi)
- 5元宇宙深度解析—未來的未來-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費(fèi)
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費(fèi)
- 7元宇宙底層硬件系列報(bào)告
- 13.42 MB | 182次下載 | 免費(fèi)
- 8FP5207XR-G1中文應(yīng)用手冊(cè)
- 1.09 MB | 178次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊(cè)免費(fèi)下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動(dòng)電路設(shè)計(jì)》 溫德爾著
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191187次下載 | 免費(fèi)
- 7十天學(xué)會(huì)AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論