 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
介紹:
EV 是電動汽車的縮寫。電動汽車是部分或完全依靠電力供電的車輛。電動汽車的運行成本低,因為它們需要維護的活動部件較少,而且非常環保,因為它們使用很少或不使用化石燃料(汽油或柴油)。雖然一些電動汽車使用鉛酸或鎳金屬氫化物電池,但現代電池電動汽車的標準現在被認為是鋰離子電池,因為它們具有更長的壽命并且在保持能量方面表現出色,每次自放電率僅為 5%月。盡管效率有所提高,但這些電池仍然存在挑戰,因為它們可能會經歷熱失控,例如,導致特斯拉 Model S 起火或爆炸,
理論:
當汽車的踏板被踩下時,然后:
- 控制器從電池和逆變器獲取并調節電能
- 通過控制器設置,逆變器然后向電機發送一定量的電能(根據踏板上的壓力深度)
- 電動機將電能轉化為機械能(旋轉)
- 電機轉子的旋轉使變速器旋轉,因此車輪轉動,然后汽車移動。
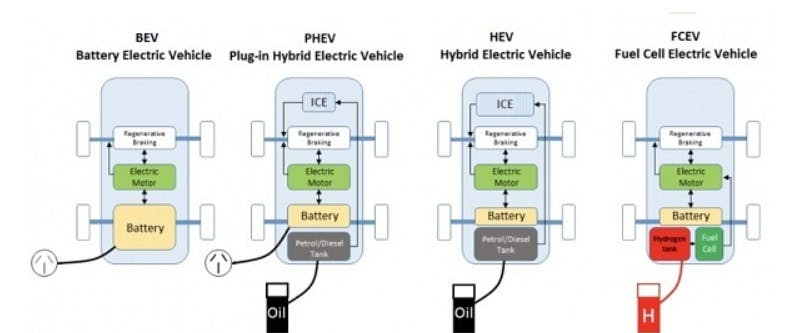
電動汽車有 4(四)種類型,概述如下:
- 電池電動汽車 (BEV)
雜交種
- 混合動力電動汽車 (HEV)
- 插電式混合動力汽車 (PHEV)
- 混合動力電動汽車 (HEV)插電式混合動力電動汽車 (PHEV)
- 燃料電池電動汽車 (FCEV)
系統級配置:
系統級配置處理整個 EV 的控制。整個電動汽車的簡單框圖將包括電池、直流電機及其控制單元、傳動系統和車輪。
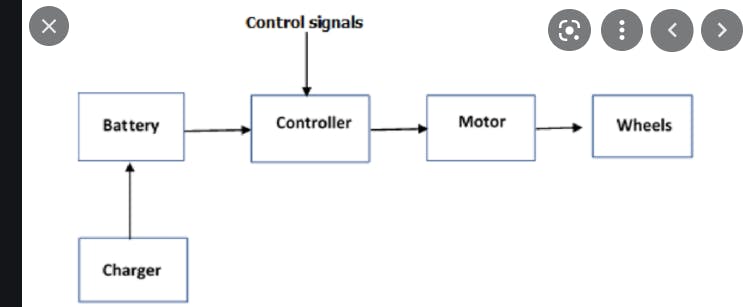
框圖是 EV 的簡單布局。在 matlab 模型中,我們將分別描述每個塊。
EV 的設計是在 simulink 中使用所需的電池組和所需的直流電機完成的。EV 的建模是使用 simulink 完成的,以描述車輛的完整工作。
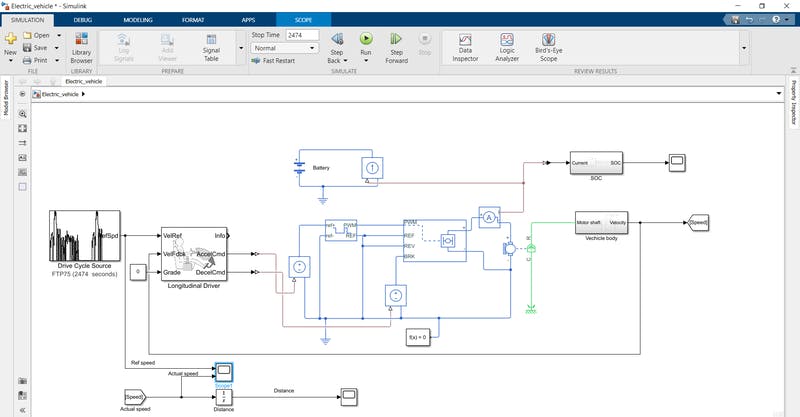
上面的框圖用于刺激 EV。該模型包括,
1.車身子系統
2.直流電機
3.電機控制器
4.縱向驅動
5.驅動循環
6.電池
7.SOC子系統
現在我們可以看到用于 EV 建模的模塊的組件級詳細信息。
1.車身子系統:
該子系統由幾個塊組成,
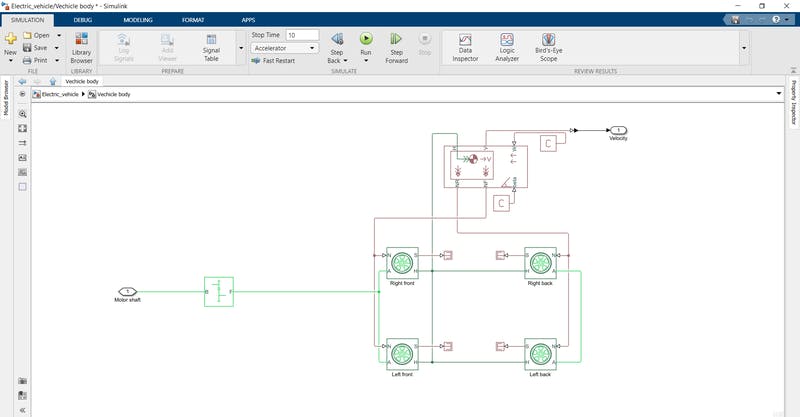
該子系統由車輪塊、齒輪塊和車身塊組成。
輪胎塊:

在這里,我們使用輪胎塊(魔術輪塊)來制作我們的 EV 車輪。該塊有 4 個端口,即 A、N、S、H。
A口——輪軸機械保轉口。同軸的車輪應通過此口連接。
N口——作用于其上的正常反應。此口與車體塊相連。
H 端口 - 它是用于產生在其中產生的推力的車輪的機械平移保護端口。四個車輪通過該端口連接,并且該端口也連接到車體端口中的同一個平移端口。
S 端口 - 它是車輪的 Slip 輸出。這里不連接,或者可以連接到用于無連接端口的 ps 終結器。
該塊的特點是各種塊參數,
- 峰值縱向力設置為3000N
- 滑動設置為 10%
- 輪胎半徑為 0.3m
- 車輪慣量保持在1Kgm^2
- 滾動系數保持為0.015
此輪胎塊與車體 simscape 塊連接
車身:
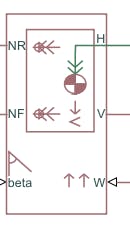
車體塊用于將車輪連接到現實世界的車輛。它由 NR、NF、beta、V、H、W 塊組成
Nf-Nr - 它們是連接到 EV 前后輪的正常反應輸出端口。
H口- 與車輪H口相連的機械平移保護口。
V 端口 - 是車輛的實際輸出速度,模擬后發送到示波器查看輸出圖。它也作為車輛控制的反饋。
beta - 道路傾斜角。這里它被認為是恒定的 0 值。
W端口- 迎面風速。這里被認為是常數0值。
改變塊的參數以控制在輪軸之間分布的空氣動力阻力、車身質量和路面傾角。
- 毛重為1200kg
- 幾何參數保持不變
- 阻力系數取0.3
- 不考慮車輛的俯仰動力學。
齒輪箱:
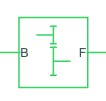
這里使用簡單的齒輪箱進行模擬。B口作為輸入,F口作為輸出。輸入用于將電機軸插入齒輪箱,輸出口用于傳遞電機軸到輪軸。
電機軸的傳遞取決于齒輪箱的傳動比。這里的值為3.73。齒輪箱的軸設置為與電機的旋轉方向相同。
2.直流電機:
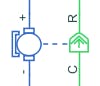
+ 和 - 符號表示連接到受控電源的電機的電氣輸入。
R 和 C 符號表示電機的機械輸出。R 端口給出扭矩和速度值,作為輸入給車體子系統。C 端口連接到機械參考。
電機參數改變為,
- 磁場類型選擇為永磁體
- 空載轉速保持在10000rpm
- 額定轉速8000rpm
- 額定負載為60kw
- 額定直流電源為 330v
3.電機控制器:
如果直流電機直接連接到電池,它將在電池所需的電壓下運行,我們無法控制電機的速度。因此建議在電機和電池之間使用控制器。控制器由兩個主要部件 - H 橋和 PWM 控制電壓。
H橋:
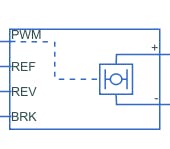
此塊代表 H 橋電機驅動器。它有 $ 輸入和兩個輸出端子。
PWM 端口 - 將電壓采樣到 PWM 信號的輸入端口。該橋可以在兩種模式下運行。在 PWM 模式下,如果給定的 pwm 大于閾值,橋將運行。在平均模式下,pwm電壓值除以 pwm 信號來確定電橋導通時間的比率。
REF 端口 - 這是與 pwm 端口相結合的參考電壓,以使電機平穩運行。它通常接地。
REV 端口 - 這決定了電機的反向運動。這里它是接地的。
BRk 端口 - 用于車輛制動。通過受控電壓源與縱向驅動塊連接。
該塊的其他參數包括,
- 選擇的模擬模式是平均模式,因為它節省了我們的模擬時間。
- 啟用再生制動,因此當車輛開始減速時,電池會被充電。
- 負載電流設置為平滑值
- 輸出幅度值設置為與電池電壓相同的330v。
- 輸入閾值保持為常數參數。
受控PWM電壓:

Simulink 提供了一個內置的受控 PWM 電壓模塊。它是向 H 橋電路提供脈沖所必需的。
它由兩個參考電壓輸入組成,用于為電機提供必要的電壓。輸入由驅動器提供,模塊相應地生成用于加速和制動的脈沖。
它有兩個輸出端口,PWM端口連接H橋的PWM信號,ref也連接到H橋的ref來控制它。
塊的參數包括,
- PWM 頻率設置為 1000Hz。
- 模擬模式是平均的。
- 對于 0% 占空比,電壓縮放為 0V,對于 100% 占空比,電壓縮放為 5V。
4.縱向驅動:
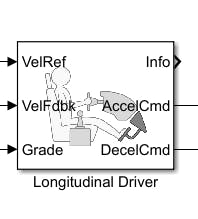
它是由動力總成模塊組提供的內置模塊。它用于通過參考值和反饋值向駕駛員發出加速和制動命令等命令。
Velref - 用于從預定義的駕駛循環數據中獲取速度的參考輸入值。
VelFdbk - 此端口從車身塊獲取反饋速度值,并將其與參考速度進行比較以實現所需的加速和減速
Grade - 用于定義車輛的梯度。這里我們假設它為 0。
Accelcmd - 它是一個輸出端口,用于向電機提供加速命令。它通過受控電壓源與受控pwm電壓的正極相連。
Decelcmd - 它也是一個輸出端口,用于向電機提供減速命令。它通過受控電壓源與H橋的brk端口相連。
信息 - 它是各種總線信號的信號。此處未連接。
該模塊通過 PI 控制器方法控制,具有跟蹤飽和和前饋增益。
5.驅動循環:
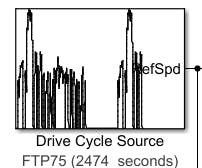
驅動循環源是用來為仿真提供參考速度的塊。這里我們選擇了FTP75標準驅動循環。它包含2474秒的數據點。refspd端口id連接到縱向驅動器的ref。
駕駛循環的參考速度也與車身塊中的速度一起提供給范圍,以檢查相應的速度。輸出速度也提供給積分器塊并提供給范圍以測量行駛距離機動車。
6.電池:

使用簡單的電池模型進行仿真。電池通過受控電流源連接,電流傳感器與電池和電機相連。受控電流源的輸出提供給soc子系統。
電池的參數是,
- 充電容量是有限的。
- 電池標稱電壓為400V
- 安培小時額定值為 50
7.SOC子系統:
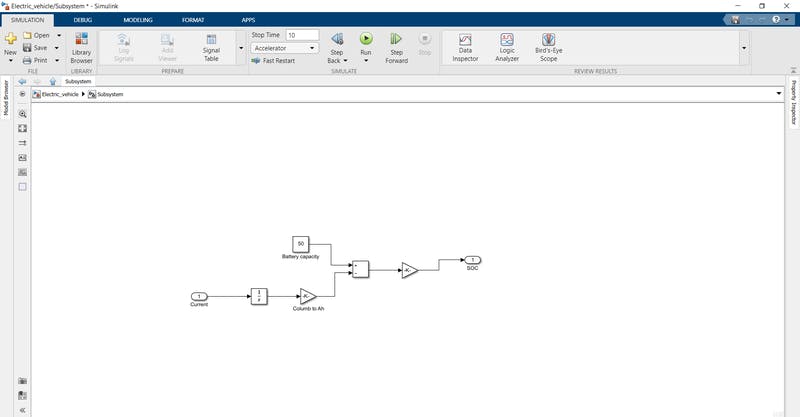
創建 SOC 子系統來計算電池的充電狀態。該系統將電池電流作為輸入,并給出充電狀態作為輸出。
將電池的電流積分得到充電值,然后將充電值轉換為安培小時值。然后將轉換后的值與標準電池充電容量進行比較。這里假設為 50Ah。
然后將比較值轉換為百分比值,它將表示電池的充電狀態。輸出也提供給示波器以圖形方式查看。
仿真結果:
現在完成上述所有連接后,我們需要運行模型。模型將運行 2474 秒,因為行駛周期包含 2474 個點。如果我們選擇其他行駛周期選項,例如全開油門,我們可以決定總時間車輛必須運行。
我們的模擬結果如下,
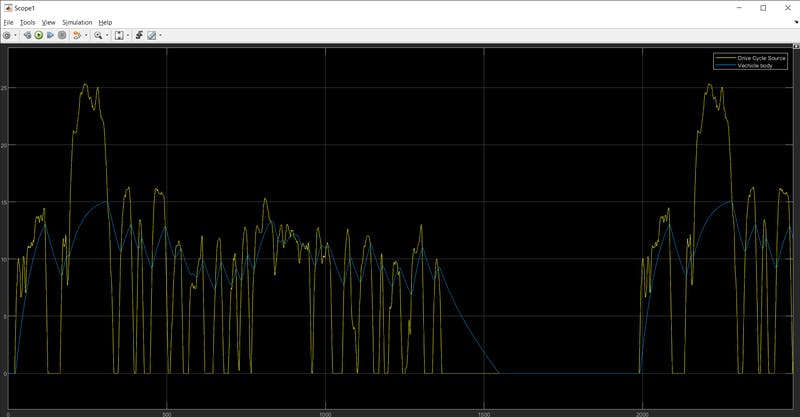
上圖顯示了參考速度和車輛實際速度。黃線表示參考速度,藍線表示車輛實際速度。我們可以看到實際速度沒有跟隨參考速度。這是由于電機的參數,如果我們提高電機的額定值,我們可以獲得非常精確的輸出。
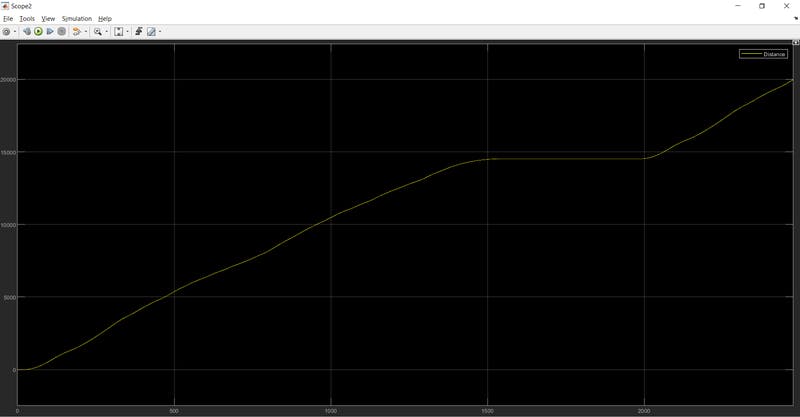
上圖顯示了車輛在整個時間段內行駛的距離。由于行駛周期中沒有負速度,該圖趨于增加。在2474s的行駛周期數據中,車輛總共行駛了20000m。我們可以還要看速度和距離的關系,當速度趨于0時,距離保持不變。
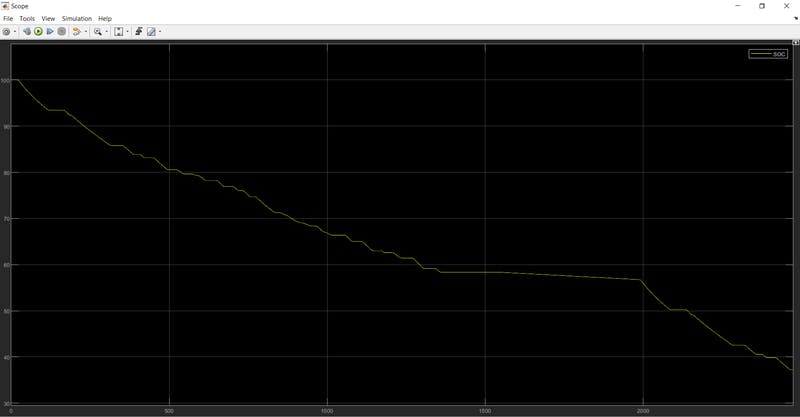
上圖顯示了電池的充電狀態。電池的容量隨著車輛的運行而下降。運行整個循環后,電池的充電狀態下降到 35% 的值。
結論:
創建了具有簡單電池和直流電機的 EV 模型,并對該模型進行了仿真以獲得上述結果。該模型顯示了電動汽車的性能。可以通過根據要求的參數設計電池和直流電機來改進它。該模型對于確定 EV 的實際參數非常有用。該模型提供了對電動汽車實際工作方式的基本了解
- 48v電動車充電器工作原理圖下載 526次下載
- 電動車控制器接線圖詳解 165次下載
- 800W全橋電動車充電器原理圖 271次下載
- 電動車充電方案NCN5201DX 29次下載
- 電動車電機選型和控制策略 43次下載
- 基于TRIZ電動車超速問題分析 1次下載
- 電動車控制電路及電機故障檢修 47次下載
- 電動車方案 57次下載
- 電動車蹺蹺板論文設計 0次下載
- 電動車蹺蹺板論文 0次下載
- 電動車開發資料 0次下載
- 電動車用電機電控系統技術現狀
- 電動車充電器電路圖全集
- 電動車蹺蹺板設計與制作(畢業論文)
- 電動車控制器接線電路圖
- 電動車電動機的構成部件 1328次閱讀
- 電動車電池變形的原因_電動車電池變形怎么辦 1.1w次閱讀
- 電動車電池型號怎么看_電動車電池的規格 6.5w次閱讀
- 電動車電機聲音大怎么回事及解決方法 6.2w次閱讀
- 電動車電機壽命是多少年_如何延長電動車電機壽命 27.8w次閱讀
- 電動車電機原理_電動車電機拆解圖 4.9w次閱讀
- 電動車電池怎樣修復_電動車電池修復方法 2.6w次閱讀
- 電動車控制器壞了怎么辦_電動車控制器失效原因 5.7w次閱讀
- 電動車控制器接線圖_電動車控制器接線方法 8w次閱讀
- 電動車后剎車怎么拆_電動車后輪剎車拆解圖 31.4w次閱讀
- 電動車剎車怎么調_調整電動車剎車的步驟教程詳解 23.9w次閱讀
- 電動車剎車不斷電常見原因_四種電動車常見故障盤點 6.7w次閱讀
- 電動車遙控鑰匙原理詳解 10.1w次閱讀
- 電動車轉換器作用 4.9w次閱讀
- 電動車充電的正確方法 5309次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論