 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
此頁面上提供了研討會體驗所需的一切。
本次研討會的參與者將獲得構(gòu)建 TI-RSLK MAX 機器人平臺、測試、定制和與之競爭的經(jīng)驗。它是一款輪式機器人車輛,使用 TI SimpleLink MSP432 LaunchPad,使其高度模塊化。使用 Energia,TI 相當(dāng)于簡單的 Arduino 風(fēng)格的腳本代碼,您將獲得完整的實驗室設(shè)置和教學(xué)材料。這是一種以可訪問和有趣的方式引入電子和嵌入式系統(tǒng)的興奮的低成本方式。由于 TI LaunchPad 是開源和模塊化硬件,我們還可以添加 BoosterPack 模塊來擴充我們的電路。本次研討會將重點介紹使用基本 TI-RSLK MAX 套件隨附的板載傳感。IR 反射、凹凸開關(guān)和編碼器。
Arduino 編程適用于編程經(jīng)驗很少或沒有編程經(jīng)驗的學(xué)生,適合 K-12 學(xué)生或大學(xué)一年級學(xué)生使用電子產(chǎn)品進行探索和原型制作。對于高級功能,鼓勵學(xué)生使用 Code Composer Studio 和 C 編程為 TI-RSLK MAX 系統(tǒng)編寫固件代碼。
如需了解更多機器人學(xué)知識,請查看 TI-RSLK MAX,這是一個全面的開源課程和硬件包,通過機電一體化的應(yīng)用教授嵌入式系統(tǒng)的基礎(chǔ)知識。TI-RSLK 為機器人系統(tǒng)知識提供了先進的墊腳石,但初學(xué)者仍然可以通過完整的講座和實驗室活動獲得。
實驗室 0 - 準(zhǔn)備工作
準(zhǔn)備好電腦和螺絲刀。建議使用 Chrome 瀏覽器來使用本次研討會的一些在線元素。
在我們開始之前,請確保您:
1.下載并安裝最新版本的Arduino IDE(1.8.13)。
2.將 URL 添加到您的 File > Preferences > Additional Board Manager URLs。如果您愿意,還可以選中顯示行號框,如果您希望它更大,請調(diào)整字體大小。
3.轉(zhuǎn)到 Tools > Boards > Boards Manager 并使用 Energia MSP432 滾動到列表底部并安裝 5.29.1
注意:此步驟需要幾分鐘,安裝時間在 10-20 分鐘之間。
4.安裝完成后,需要在Arduino IDE中選擇板子和COM口。轉(zhuǎn)到 Tool > Boards,現(xiàn)在您應(yīng)該會看到“Energia MSP432 Red Boards”>“Red LaunchPad MSP432P401R EMT”,并確保選中它。
5.您還應(yīng)該選擇正確的 COM 端口。在通過 USB 將 LaunchPad 插入計算機并安裝 LaunchPad 驅(qū)動程序(在后面的步驟中使用 RSLK 調(diào)試工具 GUI 完成)之后,可以完成此步驟。轉(zhuǎn)到工具 > COM 端口以從可用選項中進行選擇。LaunchPad 填充了兩個 COM 端口。MacOS 用戶將看到端口 001 和 004 已填充,請使用端口 1。Windows 用戶可以通過轉(zhuǎn)到設(shè)備管理器并找到 XDS110 UART 來驗證他們的 COM 端口。
6.在本頁底部的代碼部分添加可下載的 RSLK 機器人庫。轉(zhuǎn)到 Sketch > 包含庫 > 添加 .ZIP 庫。選擇下載的zip庫的文件路徑,點擊ok。它應(yīng)該說添加了庫,您可以通過轉(zhuǎn)到文件 > 示例 > TI-Robot-Lib 來檢查這一點,并查看庫中提供的示例代碼。
7.當(dāng)我們開始編程時,應(yīng)該加載并準(zhǔn)備好示例,但不要擔(dān)心運行任何代碼。接下來,您將要組裝您的機器人并使用調(diào)試工具對其進行功能測試。
實驗 1 - 構(gòu)建 TI-RSLK MAX 機器人
所需硬件
- TI-RSLK MAX 套件
- 6 節(jié) AA 電池
- 小十字螺絲刀(可選)
在這個實驗室中,我們將組裝我們的機器人。
您還需要一個電源,我們可以為機器人配備電源,使其真正移動。TI-RSLK 需要 6 節(jié)標(biāo)準(zhǔn) AA 電池。如果您愿意,它也可以配備可充電的鎳氫電池,但可更換的堿性電池可以很好地供個人使用,并且可以持續(xù)很長時間。
按照這些說明組裝您的機器人
TI-RSLK MAX 只是快速組合在一起的幾個組件
1) 開始前先觀看組裝視頻并查看施工指南
- 一個。請注意,機箱板應(yīng)預(yù)先安裝,因此即使視頻涵蓋了它,您也無需將其放在上面
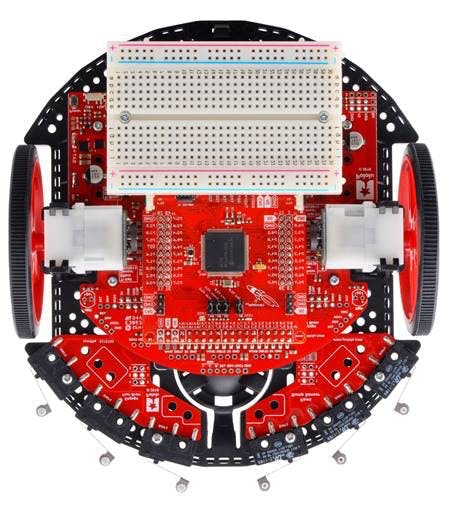
- 乙。請注意,視頻中沒有介紹面包板,但您可以使用下圖查看它們的安裝位置。您無需解開粘合墊,只需將螺釘穿過粘合劑即可將其擰入支架。要固定支架,您需要卸下電池蓋并將固定螺母安裝到電池倉內(nèi)側(cè)的指定位置,以便將支架擰入。
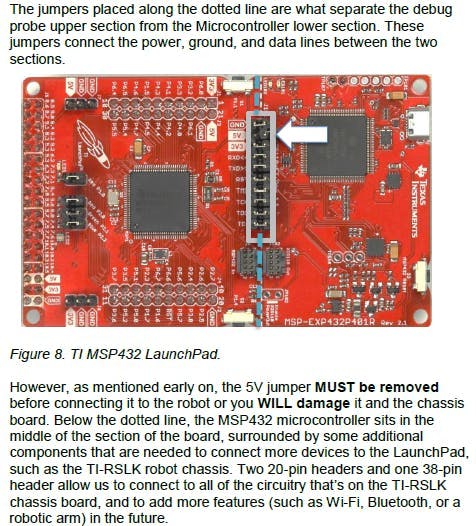
2) 驗證所有 LaunchPad 上的 5V 跳線是否已移除,它們應(yīng)該在工廠完成,但只需驗證,否則會導(dǎo)致災(zāi)難性故障。

3) 確保將電機安裝座完全固定好,使其與底盤齊平。如果你不這樣做,那么你很容易彎曲和折斷固定片,這會阻止你完全插入電機,直到那些破損的片被移除,并且可能會在以后導(dǎo)致一些失速問題

4) 面包板支架放置在藍色圓圈處

5) 做一個快速的功能檢查。確認碰撞開關(guān)是否發(fā)出咔噠聲,電源按鈕在 ON/OFF 開關(guān)處于 OFF 位置時工作,四個大電容器在機箱板上就位且沒有損壞,用手轉(zhuǎn)動車輪時沒有摩擦.
6) 組裝后立即使用在線調(diào)試工具:
- 一個。這使您可以驗證一切是否正常。如果您想確保您的機器人沒有損壞,它也會在以后為您提供幫助。
- 乙。使用 Chrome 或 Firefox 瀏覽器并安裝瀏覽器擴展 + TI Cloud Agent 本地驅(qū)動程序。這些對于讓 LaunchPad 正常工作至關(guān)重要,因此如果安裝不正確,GUI 將無法工作。當(dāng)我們稍后運行 Arduino 時,安裝 TI Cloud Agent 也很重要。
- C。如果儀表板有任何問題(未連接硬件等),請嘗試刷新頁面并重試。如果您完全無法讓 GUI 工作,您也可以嘗試下載本地副本嘗試。
?
Mac 操作系統(tǒng)
Linux 64 位
- d。每次都會下載測試固件,因此在加載頁面時請確保 LaunchPad 已通過 USB 數(shù)據(jù)線連接到 PC
- e。在您確認機箱板的電源打開之前,電機或光傳感器將無法工作。使用機箱板上的電源按鈕,您應(yīng)該看到藍色電源 LED 指示它已打開。開/關(guān)開關(guān)可能會令人困惑,但最好將其留在關(guān)閉位置。如果您將其打開,它將工作,但無法將其關(guān)閉,直到您將其關(guān)閉并按下電源按鈕。
- F。要將其關(guān)閉,請確保將開/關(guān)開關(guān)撥到 OFF 并按下電源按鈕,您應(yīng)該會看到藍色 LED 熄滅
- G。如果您發(fā)現(xiàn)電機不工作或聽到一些摩擦聲,請確保磁鐵沒有太緊并防止電機齒輪移動。您可以用指甲松開電機軸上的磁鐵。
- H。如果您發(fā)現(xiàn)碰撞開關(guān)有任何問題,請確保連接正確對齊。對于線路傳感器的任何問題,請確保其方向正確并且所有連接都對齊。
您的機器人已組裝并驗證功能正常。希望它感覺相當(dāng)穩(wěn)定并準(zhǔn)備好滾動。
實驗 2 - Arduino 編程介紹
所需硬件
- 組裝好的 TI-RSLK MAX(安裝電池并進行功能測試)
所需軟件
- Arduino IDE
- TI-RSLK MAX 機器人庫
Arduino IDE 允許您通過 TI LaunchPad 使用 Arduino 風(fēng)格編程開始快速原型設(shè)計。這使得在項目開始時測試不同的社區(qū)硬件解決方案并將它們集成到自定義應(yīng)用程序中非常棒。
在本實驗中,我們將設(shè)置我們的開發(fā)環(huán)境。我們可以做的第一件事是讓 LED 閃爍,以確保我們可以用計算機對微控制器進行編程。
1.打開 Arduino IDE。
2.首先,確保您選擇了您的開發(fā)板,方法是轉(zhuǎn)到工具 > 開發(fā)板并在菜單上查找“LaunchPad with MSP432”(如果您還沒有的話)。如果您的 LaunchPad 板不存在,請轉(zhuǎn)到 Boards Manager 并安裝您的 LaunchPad 板包。MSP432 板應(yīng)該是列表中的最后一個選項。注意:MSP432 EMT 表示多任務(wù)處理并具有 RTOS 功能,但我們現(xiàn)在不需要。
3.如果您正確安裝了驅(qū)動程序,那么您應(yīng)該會在工具 > 端口下看到 COM 端口。如果有多個選項,請選擇具有 UART 功能的端口。您可以在計算機的設(shè)備管理器中驗證 COM 端口。
現(xiàn)在我們將第一次運行我們的代碼示例。
庫中的前兩個示例是相同的代碼 01_Bump_Switch_Motor_Bare 和 02_Bump_Switch_Motor_Simplified,它們將向前移動機器人,直到碰撞開關(guān)碰到什么東西。非常簡單,可以跳過。裸代碼使用對庫的直接調(diào)用,簡化代碼使用庫中定義的函數(shù)。
4.轉(zhuǎn)到文件 > 示例 > 自定義機器人庫 > TI-Robot-Lib > 03_Bump_Switch_LED_Bare。單擊上傳按鈕,完成后您可以點擊碰撞開關(guān)以測試不同的 LED 并驗證新代碼是否可以閃爍到 RSLK MAX。
5.接下來,您可以運行跳舞機器人示例。這將為您的機器人編程提供一個有趣的開始。轉(zhuǎn)到文件 > 示例 > 自定義機器人庫 > TI-Robot-Lib > 05_Dancing_Robot_Simplified。程序上傳后,綠色 LED 將閃爍,表示正在等待按鈕按下。按 S1(左側(cè))按鈕或 S2(右側(cè))按鈕告訴機器人開始舞蹈序列。您也可以嘗試 06_Dancing_Robot_2_Simplified,這是一個略有不同的動作。
或者,通過轉(zhuǎn)到文件 > 新建打開一個新草圖。粘貼下面的示例代碼并運行它。
#include "Energia.h"
#include "SimpleRSLK.h"
bool hit_obstacle = false;
void waitBtnPressed() {
while(digitalRead(LP_S2_PIN) == 1){
digitalWrite(LP_RGB_LED_GREEN_PIN, HIGH);
delay(500);
digitalWrite(LP_RGB_LED_GREEN_PIN, LOW);
delay(500);
}
}
void checkCollision() {
for(int x = 0;x<6;x++)
{
/* Check if bump switch was pressed
* Parameter:
* bump switch number -> 0-5
* Returns:
* true -> if specific switch was pressed
* false -> if specific switch was not pressed
*/
if(isBumpSwitchPressed(x) == true) {
hit_obstacle = true;
Serial.println("Collision detected");
disableMotor(BOTH_MOTORS);
break;
}
}
}
void setup() {
/* Set serial communication to 115200 baud rate for MSP432 */
Serial.begin(115200);
delay(500);
/* Run setup code */
setupRSLK();
/* Initialize LED pins as outputs */
pinMode(LED_FR_PIN, OUTPUT);
pinMode(LED_FL_PIN, OUTPUT);
pinMode(LED_BR_PIN, OUTPUT);
pinMode(LED_BL_PIN, OUTPUT);
pinMode(LP_RED_LED_PIN, OUTPUT);
pinMode(LP_RGB_LED_RED_PIN, OUTPUT);
pinMode(LP_RGB_LED_BLUE_PIN, OUTPUT);
pinMode(LP_RGB_LED_GREEN_PIN, OUTPUT);
/* Initialize LaunchPad buttons as inputs */
pinMode(LP_S1_PIN, INPUT_PULLUP);
pinMode(LP_S2_PIN, INPUT_PULLUP);
}
void loop() {
Serial.println("Waiting until left button is pushed");
/* Wait until button is pressed to start robot */
waitBtnPressed();
/* Wait two seconds before starting */
delay(2000);
digitalWrite(LP_RGB_LED_BLUE_PIN, HIGH);
/* Enables specified motor.
* Parameter:
* Motor your referencing -> LEFT_MOTOR RIGHT_MOTOR BOTH_MOTORS
*/
enableMotor(BOTH_MOTORS);
/* Set direction of motor rotation.
* Parameter:
* Motor your referencing -> LEFT_MOTOR RIGHT_MOTOR BOTH_MOTORS
* Direction -> MOTOR_DIR_FORWARD MOTOR_DIR_BACKWARD
*/
setMotorDirection(LEFT_MOTOR,MOTOR_DIR_FORWARD);
setMotorDirection(RIGHT_MOTOR,MOTOR_DIR_FORWARD);
/* Set speed of motor.
* Parameter:
* Motor your referencing -> LEFT_MOTOR RIGHT_MOTOR BOTH_MOTORS
* Speed -> 0 - 100
*/
setMotorSpeed(BOTH_MOTORS,10);
while(!hit_obstacle) {
/* Move robot in place */
/* Right turn in place */
setMotorDirection(LEFT_MOTOR, MOTOR_DIR_BACKWARD);
setMotorDirection(RIGHT_MOTOR, MOTOR_DIR_FORWARD);
delay(1000);
/* Left turn in place */
setMotorDirection(LEFT_MOTOR, MOTOR_DIR_FORWARD);
setMotorDirection(RIGHT_MOTOR, MOTOR_DIR_BACKWARD);
delay(1000);
/* 360 spin right */
setMotorDirection(LEFT_MOTOR, MOTOR_DIR_FORWARD);
setMotorDirection(RIGHT_MOTOR, MOTOR_DIR_BACKWARD);
setMotorSpeed(BOTH_MOTORS,50);
delay(800);
setMotorSpeed(BOTH_MOTORS,10);
/* 360 spin left */
setMotorDirection(LEFT_MOTOR, MOTOR_DIR_BACKWARD);
setMotorDirection(RIGHT_MOTOR, MOTOR_DIR_FORWARD);
setMotorSpeed(BOTH_MOTORS,50);
delay(800);
setMotorSpeed(BOTH_MOTORS,10);
/* Left turn in place */
setMotorDirection(LEFT_MOTOR, MOTOR_DIR_BACKWARD);
setMotorDirection(RIGHT_MOTOR, MOTOR_DIR_FORWARD);
delay(500);
/* Right turn in place */
setMotorDirection(LEFT_MOTOR, MOTOR_DIR_FORWARD);
setMotorDirection(RIGHT_MOTOR, MOTOR_DIR_BACKWARD);
delay(1000);
/* Left turn in place */
setMotorDirection(LEFT_MOTOR, MOTOR_DIR_BACKWARD);
setMotorDirection(RIGHT_MOTOR, MOTOR_DIR_FORWARD);
delay(1000);
/* 360 spin right */
setMotorDirection(LEFT_MOTOR, MOTOR_DIR_FORWARD);
setMotorDirection(RIGHT_MOTOR, MOTOR_DIR_BACKWARD);
setMotorSpeed(BOTH_MOTORS,50);
delay(800);
setMotorSpeed(BOTH_MOTORS,10);
/* 360 spin left */
setMotorDirection(LEFT_MOTOR, MOTOR_DIR_BACKWARD);
setMotorDirection(RIGHT_MOTOR, MOTOR_DIR_FORWARD);
setMotorSpeed(BOTH_MOTORS,50);
delay(800);
setMotorSpeed(BOTH_MOTORS,10);
}
}
這段代碼讓您的機器人在原地旋轉(zhuǎn)以顯示我們擁有的簡單電機控制。您可能需要對其進行修改,因為機器人所在的表面會影響其轉(zhuǎn)動速度。不要太掛在這部分上,因為我們將在下一個實驗室中添加更多的自治層。這再次證明了我們的電機確實可以工作,并讓我們對電機邏輯有所了解。
6.一些可選的練習(xí)可以用編碼器和線跟隨例子來完成。轉(zhuǎn)到文件 > 示例 > 自定義機器人庫 > TI-Robot-Lib > 04_Encoder_Simplified。此編碼器示例將通過串行監(jiān)視器向您顯示值,這有利于調(diào)試。
如果您想嘗試以下線路,結(jié)果將根據(jù)您可用的線路類型而有所不同。您可以通過在白紙上使用記號筆或使用電工膠帶繪制高對比度線條。您還可以從在線示例打印線軌。機器人跟隨路線的能力將根據(jù)軌道的條件而變化。
現(xiàn)在我們準(zhǔn)備測試線路跟蹤能力。通過打印出軌跡或使用黑色電工膠帶制作軌跡,在白色表面上設(shè)置黑線。設(shè)置好線路后,在以下示例中加載線路。轉(zhuǎn)到文件 > 示例 > 自定義機器人庫 > TI-Robot-Lib > 07_Line_Following_Simplified。它首先通過前進和后退對線路進行校準(zhǔn)。然后您可以通過再次單擊該按鈕來開始線檢測。機器人將嘗試保持在線。如果您將機器人設(shè)置為較慢的速度,它可能會更好地工作。注意:根據(jù)您的線路設(shè)置,此示例可能有點棘手,因此請隨意跳過。
故障排除
代碼不上傳?
- 檢查 Arduino 調(diào)試窗口中的錯誤。編譯器會告訴你發(fā)生了什么。錯誤以紅色文本顯示。
- 有時,您的 LaunchPad 會卡住或掛斷之前的代碼。拔下 LaunchPad 并將其重新插入以執(zhí)行完全重置。這稱為上電復(fù)位。有時使用 RESET 按鈕可以工作,但通常最好將電源斷開并讓微控制器完全復(fù)位。
- 如果您上傳失敗,則可能是您的驅(qū)動程序未正確安裝。Arduino IDE 有時會給出錯誤“未找到未使用的 FET”,這意味著它找不到連接到您的計算機的 LaunchPad。通過運行 TI Cloud Agent 或在本地安裝 RSLK 調(diào)試工具,確保為您的操作系統(tǒng)下載 USB 驅(qū)動程序。還要確保您的 USB 電纜不僅僅是電源。使用包裝盒中的一種以獲得最佳效果。
- 如果您對 GUI 或第一個 LED 示例沒有任何問題,那么您的 Energia 應(yīng)該已正確設(shè)置。如果遇到任何問題,請重新啟動 LaunchPad 并重新啟動 Arduino IDE。確保在工具菜單下選擇正確的串口和板卡類型。
LED 不亮?
- 確保您正確上傳了代碼并正確命名了 LED 引腳的變量。您的 LED 損壞的可能性很小,但我們可以通過使用相同代碼閃爍不同的 LED 來驗證。
- 點擊重置按鈕,有時 LaunchPad 需要這樣做才能運行新上傳的程序。
實驗室 3 - 基本自主機器人
所需硬件
- 組裝好的 TI-RSLK MAX
它會導(dǎo)航嗎?
我們將繼續(xù)使用一些更復(fù)雜的示例代碼來測試我們的機器人。我們可以使用庫中的狀態(tài)機示例。轉(zhuǎn)到文件 > 示例 > 自定義機器人庫 > TI-Robot-Lib > 09_State_Machine_Simplified。或者,通過轉(zhuǎn)到文件 > 新建打開一個新草圖。粘貼下面的示例代碼并運行它。
#include "Energia.h"
#include "SimpleRSLK.h"
/* Defines struct for state machine states */
typedef enum
{
START = 0,
WAIT,
GO,
GO2,
BUMPED1a,
BUMPED1b,
DRIVE,
STOP
} my_state_t;
/* Initialize state machine in START state */
my_state_t state = START;
/* Variable that will take the state machine to the STOP state */
bool done;
/* Initialize objects */
void setup() {
/* Set serial communication to 115200 baud rate for MSP432 */
Serial.begin(115200);
delay(500);
Serial.println("Initializing.....");
setupRSLK();
/* Initialize LED pins as outputs */
pinMode(LED_FR_PIN, OUTPUT);
pinMode(LED_FL_PIN, OUTPUT);
pinMode(LED_BR_PIN, OUTPUT);
pinMode(LED_BL_PIN, OUTPUT);
pinMode(LP_RED_LED_PIN, OUTPUT);
pinMode(LP_RGB_LED_RED_PIN, OUTPUT);
pinMode(LP_RGB_LED_BLUE_PIN, OUTPUT);
pinMode(LP_RGB_LED_GREEN_PIN, OUTPUT);
/* Initialize LaunchPad buttons as inputs */
pinMode(LP_S1_PIN, INPUT_PULLUP);
pinMode(LP_S2_PIN, INPUT_PULLUP);
Serial.println("Initializing System Complete.");
}
void loop() {
// Emergency stop switch S2
// Switch to state "STOP" if pressed
if (digitalRead(LP_S2_PIN) == 0) state = STOP;
//-----------------------------------
// Main State Machine
//-----------------------------------
switch (state) {
case START:
Serial.println("Enter START state");
state = WAIT;
break;
case WAIT:
Serial.println("Enter WAIT state");
digitalWrite(LP_RGB_LED_GREEN_PIN, HIGH);
delay(200);
digitalWrite(LP_RGB_LED_GREEN_PIN, LOW);
delay(200);
if (digitalRead(LP_S1_PIN) == 0) {
state = GO;
}
break;
case GO:
Serial.println("Enter GO state");
/* Start running the motors */
/* Enables specified motor.
* Parameter:
* Motor your referencing -> LEFT_MOTOR RIGHT_MOTOR BOTH_MOTORS
*/
enableMotor(BOTH_MOTORS);
setMotorDirection(BOTH_MOTORS, MOTOR_DIR_FORWARD);
setMotorSpeed(BOTH_MOTORS, 25);
state = GO2;
break;
case GO2:
Serial.println("Enter GO2 state");
/* Detect a bump and then switch to bump correction state */
for(int x = 0;x<6;x++)
{
if(isBumpSwitchPressed(x) == true) state = BUMPED1a;
}
/* Continue to rotate until done condition is met */
/* Certain distance traveled or other conditions can be set */
if (getEncoderLeftCnt() > 50000) {
done = 1;
}
if (done) state = STOP;
break;
case BUMPED1a:
Serial.println("Enter BUMPED1a state");
/* Stop the motors */
setMotorSpeed(BOTH_MOTORS,0);
/* Reverse the robot */
setMotorDirection(BOTH_MOTORS, MOTOR_DIR_BACKWARD);
setMotorSpeed(BOTH_MOTORS,25);
delay(500);
state = BUMPED1b;
break;
case BUMPED1b:
Serial.println("Enter BUMPED1b state");
/* Turn robot to avoid obstacle */
setMotorSpeed(LEFT_MOTOR,0);
setMotorSpeed(RIGHT_MOTOR,25);
delay(100);
state = DRIVE;
break;
case DRIVE:
Serial.println("Enter DRIVE state");
/* Put motors back to forward direction */
setMotorDirection(BOTH_MOTORS, MOTOR_DIR_FORWARD);
setMotorSpeed(BOTH_MOTORS, 25);
state = GO2;
break;
case STOP:
Serial.println("Enter STOP state");
Serial.println("Press Reset to begin again");
/* Stop all motors */
disableMotor(BOTH_MOTORS);
break;
}
delay(10);
}
此代碼將使用基本狀態(tài)機向機器人展示如何撞到墻壁和物體并避免它們。這稱為航位推算導(dǎo)航。
嘗試其他一些庫示例。您可以看到它們基于名為 SimpleRSLK.h 的文件。如果您想在自己的代碼中使用這些函數(shù),或者只是知道它在做什么,請進入您的 Arduino Libraries 文件夾,您可以查看庫源文件。
希望您喜歡 TI-RSLK MAX 的體驗!
結(jié)論
學(xué)習(xí)不止于此。通過探索課程,深入了解 TI-RSLK MAX 的高級主題。與 Jonathan Valvano 博士一起獲得有關(guān)嵌入式系統(tǒng)的指導(dǎo)學(xué)習(xí)體驗。在 20 多個學(xué)習(xí)模塊中查看講座視頻和更多內(nèi)容。
您可以學(xué)習(xí)如何使用模塊 1 中的代碼項目設(shè)置 Code Composer Studio。還有使用 DriverLib 進行編程。這是這種風(fēng)格編程的示例
您還可以從 edX 了解有關(guān)機電一體化主題的更多信息,并將您的知識應(yīng)用于任何系統(tǒng)。
?
?
- TI RSLK MAX增強基礎(chǔ)套件
- KUKA機器人編程 1次下載
- 用于TI RSLK MAX機器人平臺的IR RX/TX BoosterPack
- 基于TI-RSLK的導(dǎo)航控制機器人 0次下載
- 使用TI RSLK MAX構(gòu)建聲音跟隨機器人
- 2015 TI 工業(yè)應(yīng)用研討會重磅來襲!
- 2015 TI 汽車電子研討會震撼來襲!
- TI-RSLK課程學(xué)習(xí)-0 課程簡介與及資料下載
- 庫卡機器人有限公司培訓(xùn)資料之庫卡機器人教程C2系統(tǒng)編程 9次下載
- 基于DSP和PC的農(nóng)業(yè)機器人控制系統(tǒng) 18次下載
- Arduino教學(xué)機器人的使用教程免費下載 38次下載
- Arduino開發(fā)機器人經(jīng)典書籍推薦Arduino開發(fā)實戰(zhàn)指南:機器人卷
- TI MCU 與無線連接技術(shù)研討會技術(shù)講座實錄 5次下載
- 《2016 TI 嵌入式產(chǎn)品研討會》觀看指南 9次下載
- 安捷倫科技元件量測技術(shù)研討會
- 兆易創(chuàng)新亮相2024地平線地瓜機器人開發(fā)者日 460次閱讀
- 國產(chǎn)可編程硅振在機器人伺服系統(tǒng)中的應(yīng)用,替換SiTime 282次閱讀
- 工業(yè)機器人的四種編程(示教編程、離線編程、自增強現(xiàn)實編程主編程)剖析! 2974次閱讀
- 如何使用PLC控制機器人 1882次閱讀
- 工業(yè)機器人語言編程 596次閱讀
- 機器人控制系統(tǒng)分類_機器人控制系統(tǒng)有哪些 2.6w次閱讀
- 工業(yè)機器人編程入門_工業(yè)機器人的編程要求 9787次閱讀
- 焊接機器人編程好學(xué)嗎_前景怎么樣 1.6w次閱讀
- 常用的機器人編程方法有哪些 1.6w次閱讀
- 機器人十大流行編程語言的介紹及機器人編程系統(tǒng)以及操作方法 4.2w次閱讀
- 機器人離線編程與機器人編程趨勢 6243次閱讀
- 機器人的最佳編程語言是什么?機器人十大流行編程語言匯總 3.5w次閱讀
- 焊接機器人及系統(tǒng)介紹(焊接機器人系統(tǒng)組成和編程方法及發(fā)展趨勢) 2.7w次閱讀
- 焊接機器人編程入門與編程技巧介紹 8.6w次閱讀
- 對《工業(yè)機器人編程指令詳解》的詳細介紹 1.9w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應(yīng)用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關(guān)電源設(shè)計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅(qū)動電路設(shè)計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學(xué)會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論