 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
項目目的和期望
我們提出了一種使用圖像識別和自動駕駛技術(shù)的駕駛機器人。針對高爾夫球場進行了優(yōu)化。本文值得注意的是,我們使用了賽靈思為所有開發(fā)人員開發(fā)的 Vitis AI 來識別圖像。跟蹤鵝的自動駕駛機器人在高爾夫球場周圍配備了自動監(jiān)控功能。我們項目的概念是幾個機器人相互發(fā)送和接收數(shù)據(jù),識別和跟蹤鵝,并將它們趕走,從而對商業(yè)區(qū)造成破壞。當機器人識別鵝時,它們會積累鵝的照片數(shù)據(jù)并將其提供給實驗室,從而在動物行為矯正和害蟲防治領(lǐng)域?qū)崿F(xiàn)高效使用。
我們獾的故事
你好。我們是 BADGER,它將通過自動駕駛機器人保護人們的生活環(huán)境免受野生動物的侵害。
在美國高爾夫球場上占世界高爾夫球場人口的 50%。他們正在遭受來自野生動物的一定傷害。
這是一個高爾夫球手。
不久前,這位高爾夫球手在參加一場高爾夫錦標賽時感到很尷尬。
一只鵝就這樣飛了進來,襲擊了這個男孩。他甚至摔倒了,但鵝并沒有阻止攻擊。像這樣,生活在高爾夫球場周圍的鵝會攻擊高爾夫球手。遷徙過程中,成百上千人蜂擁安家,業(yè)主難以管理。
今天的主角是加拿大鵝。
加拿大鵝每天吃 5 磅草,每天大便 1-2 磅。
事實上,加利福尼亞的 PGA 高爾夫球場每年支付 250,000 美元來清除這些鵝糞。
現(xiàn)有解決方案
這些是用來解決這個問題的傳統(tǒng)方法。
高爾夫行業(yè)現(xiàn)在已經(jīng)高度數(shù)字化,但模擬方法主導了如何處理鵝損傷。
為了解決這個問題,擁有PEST CONTROL技術(shù)的公司生產(chǎn)/銷售自己的技術(shù)的鵝追逐機,但在價格和技術(shù)方面也沒有生產(chǎn)力。
Goosinator 每件產(chǎn)品的售價通常為 5,000 美元,并且在操作時需要相關(guān)人員手動操作,因此每當出現(xiàn)問題時都不得不召集人來管理鵝,這很麻煩。
Bird-x成本較低,但只能覆蓋 7 英畝,因此很難在任何給定時間管理 100-190 英畝 PGA 高爾夫球場的整個區(qū)域。現(xiàn)有服務(wù)似乎比預防性解決方案具有更高的目的,問題后的措施比預防性解決方案具有更高的目的。PGA高爾夫球場的規(guī)模似乎很難覆蓋,它不是自動化的,而且面積很大。
畢竟,設(shè)備使用頻率較低,對于高爾夫球手來說,在高爾夫球場上使用太貴或效率低下。因此,高爾夫市場利益相關(guān)者認識到高價設(shè)備和非生產(chǎn)性服務(wù),需要在鵝巢覆蓋PGA區(qū)域之前采取預防性解決方案,并且還應該易于操作。
讓我向您介紹我們的機器人與 Xilinx 產(chǎn)品的特性和優(yōu)勢。
我們的機器人 - 獨創(chuàng)性和差異化
我們?yōu)?PGA 高爾夫球場設(shè)計了一個大型耐用的兩棲鵝清除獾,每年花費 250 美元用于清除和維護鵝。我們的兩棲獾能夠拍攝和檢測鵝并將它們趕走。除此之外,獾還具有 GPS 巡邏路徑,具有防撞和神經(jīng)網(wǎng)絡(luò)圖像識別功能。我們的獾以低維護和具有成本效益的方式幫助驅(qū)逐干擾業(yè)務(wù)的鵝,而不是用老式的射擊方式。
我們的機器人 - 技術(shù)開發(fā)
1. 易于駕駛
機器人可以很容易地被帶到主人自己的高爾夫球場。它是一個圖形用戶界面,用戶可以直接設(shè)置機器人運行的路線。當用戶在 GUI 中設(shè)置 GPS 路徑并開始工作時,BADGR 開始自主工作。
2. 使用Vitis AI 進行深度學習圖像識別
以前和當前的鵝檢測解決方案是由 Yolov3 在 Raspberry Pi 3+ 和 Pi4 上使用兩個英特爾計算棒執(zhí)行的。在這個項目中,我們應用 Vitis AI 庫及其加載在 ZCU 104 板上的模型來檢測我們的目標對象 Canadian Geese。
機器人通過使用 Vitis AI 的神經(jīng)網(wǎng)絡(luò)圖像識別技術(shù)識別鵝。
3.兩棲
我們的產(chǎn)品采用兩棲模型設(shè)計。該機器人具有坦克驅(qū)動裝置,鏈條將電機連接到車輪,以便在兩棲模式下將電機與水隔離。
4. 自治
運行用戶設(shè)置的課程的獾。BADGER 可以識別障礙物并在遇到障礙物時避開它們。該機器人有一個攝像頭炮塔,可以在巡邏期間檢測鵝,并使用飛行時間傳感器來避障。
5. 數(shù)據(jù)
當 BADGR 找到一只鵝時,拍下鵝的照片后,它會追趕鵝。拍攝的照片會自動上傳到云端硬盤。機器人拍攝并追逐檢測到的鵝。此選項尚未與 Vitis AI 一起實施和應用。
成本效益
我們通過在線渠道租賃服務(wù)降低了折舊成本,并以更少的管理負擔確保了經(jīng)濟效益。每臺購買成本為5美元,500美元,租金為990美元。
制作 GUI 工作區(qū)
監(jiān)視器
該板僅支持顯示端口
USB集線器
USB和USB集線器可以連接BT鼠標和鍵盤,它也可以檢測USB閃存驅(qū)動器。
注意:不使用其他端口。
當前板子和顯示器設(shè)置運行正常,設(shè)置可以不使用ssh使用板子(我們不需要使用串口通信,主機和目標設(shè)置使用ssh進行安裝和調(diào)試)。使用它們,它可以直接將文件傳輸?shù)桨遄硬⑹褂冒遄觾?nèi)置的終端。
比較鵝檢測(原始模型與 Vitis AI 樣本模型)
以前的圖像檢測使用 Yolov3 和 Pi + Compustick
原始檢測FPS(Frame Per Second)小于4.5,但準確率超過96.3%。當我們使用 ZCU104 板和 yolov3 模型進行測試時,模型顯示出良好的 FPS,接近之前測量的性能 FPS。但是當用 yolov3 vcc 模型用 50 張測試圖像進??行測試時,大多數(shù)圖像被識別為鳥,但準確率很低(平均值:54.6%,標準變異:44.71%)。如果模型的制作和使用更加專注于 Goose,預計可以同時發(fā)揮這兩種情況的優(yōu)勢。這是在沒有任何指定目標檢測的情況下檢測目標的初步驗證,在我們的案例中是加拿大鵝。作為未來的工作,這可以通過微調(diào)訓練來改進。
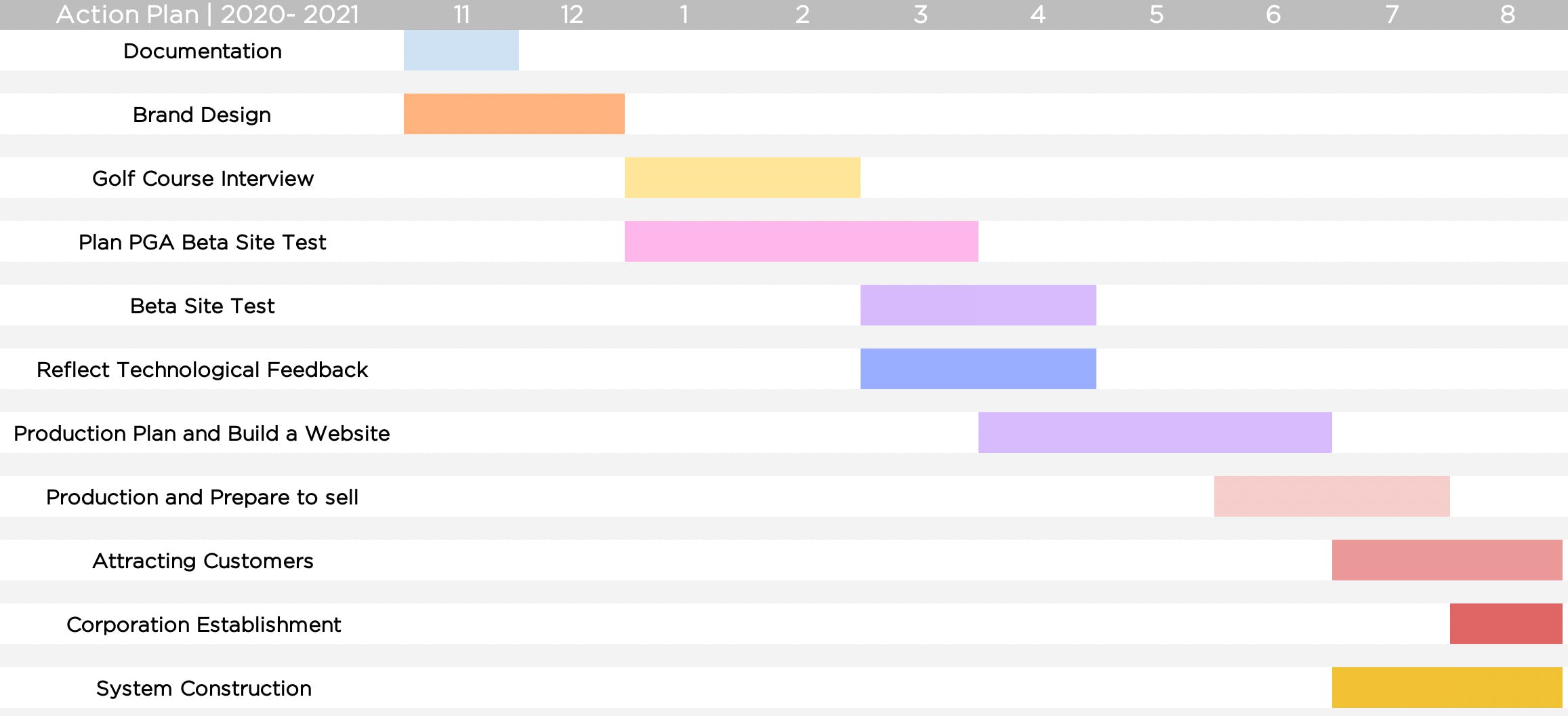
出行動計劃
我們的 BADGER 在東德克薩斯州朗維尤小鎮(zhèn)的一個高山高爾夫球場完成了駕駛,此后一直在制定一項行動計劃,以在 PGA 級高爾夫球場上測試原型。
以前的獾機器人是勒圖爾諾大學的高級設(shè)計項目,由三個國家的12位朋友組成的全球團隊,由一個機械和電子、業(yè)務(wù)團隊組成,在高級設(shè)計結(jié)束后,該項目正在與機器人組成員一起進行。在本次比賽中,團隊成員在此提交中貢獻了考慮 Vitis AI 和 ZCU 104 板的潛在用途,并進行初步驗證以應用 Vitis AI-ZCU 104 板解決方案。是 BADGER 解決了野生動物與人之間的沖突。
謝謝你。
?
- 瞳步迎賓講解機器人
- 瞳步消毒機器人方案
- ABB機器人CP中級應用培訓 12次下載
- 了解機器人電子教材下載 19次下載
- WorkVisual4.0機器人軟件手冊下載 22次下載
- 機器人無線充電電路設(shè)計 49次下載
- 基于Matlab的機構(gòu)與機器人分析資料下載 13次下載
- 基于DSP和PC的農(nóng)業(yè)機器人控制系統(tǒng) 18次下載
- 基于DSP的排險機器人車體控制系統(tǒng) 14次下載
- 基于DSP芯片的足球機器人實現(xiàn)與設(shè)計 27次下載
- 機器人PID控制概述 27次下載
- 機器人技術(shù)及其應用說明 4次下載
- Arduino教學機器人的使用教程免費下載 38次下載
- 機器人設(shè)計教程之機器人控制和決策子系統(tǒng) 25次下載
- BADGER挖隧道機器人介紹 12次下載
- 發(fā)現(xiàn)更多機器人開發(fā)技巧 AI與邊緣計算加持 695次閱讀
- 鑄造機器人是什么?選擇工業(yè)機器人應該考慮的方向 1186次閱讀
- 面對疫情 醫(yī)療機器人能幫上什么忙? 2236次閱讀
- 工業(yè)機器人技術(shù)應用 5343次閱讀
- 工業(yè)機器人編程入門_工業(yè)機器人的編程要求 9787次閱讀
- 醫(yī)用機器人的定義_醫(yī)用機器人發(fā)展 3257次閱讀
- 醫(yī)用機器人的功能_醫(yī)用機器人分類 2462次閱讀
- 機器人控制器有哪些類型_機器人控制器發(fā)展 1.2w次閱讀
- 協(xié)作機器人的起源_為什么需要協(xié)作機器人 8322次閱讀
- 機器視覺的機器人取代四臺傳統(tǒng)的火焰處理機器人 3370次閱讀
- 如何區(qū)分機器人、協(xié)作機器人和移動機器人? 7029次閱讀
- 軟體機器人 前所未見的機器人 3770次閱讀
- 機器人的最佳編程語言是什么?機器人十大流行編程語言匯總 3.5w次閱讀
- 基于PC104與C8051F120的水下機器人環(huán)境監(jiān)測系統(tǒng)設(shè)計方案 2345次閱讀
- 光纖激光機器人切割焊接技術(shù) 2733次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關(guān)電源設(shè)計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅(qū)動電路設(shè)計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論