 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
在最近的Mini but Mighty build-along 展示了帶有板載 Zynq 處理器的 Avnet MiniZed 如何控制電機之后,我開始想知道我們能做到多“強大”。
我們跟進的項目將 Zynq 的 3.3V 低功耗 IO 升級為能夠以高達 2A 的電流驅動 12V 電機。相當令人印象深刻,但讓我們再大一點!
五金件
我最近很幸運能夠玩(抱歉,努力控制)一個相當大的工業機器人手臂。這不是一個小愛好伺服驅動機器人。它是一個完整的 6 軸機器人手臂,伸展范圍約為一米,能夠以驚人的速度擺動 5 公斤的有效載荷!我們認為小型 MiniZed 能夠勝任控制它的工作嗎?好吧,讓我們找出答案!
嗯,首先你需要一個機械臂。我使用的是 Universal Robots UR5e,但任何具有標準 24V 輸入的機器人都可以。
我們如何控制它?
在微控制器/FPGA 世界中,我們習慣于使用 3.3V 的小信號,而工業世界則喜歡在 24V 下工作。有一個 IEC 61131-2 標準,所以我們在這里做的事情應該適用于很多大型設備。不幸的是,我們用于構建的 H 橋只能在高達 12V 的電壓下工作,因此我們必須自己創建一些東西。不過別擔心,這不會很困難。
構建我們的自定義 PMOD
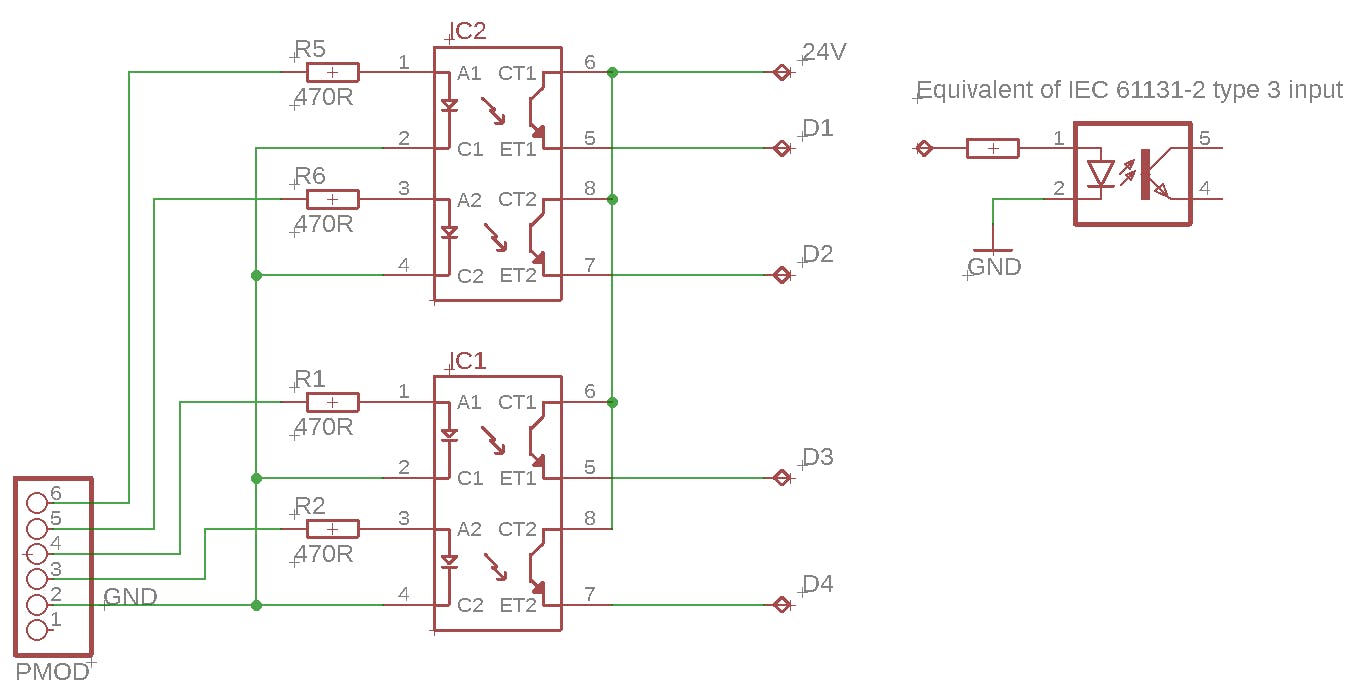
我們的 MiniZed 有 3.3V 輸出。我們的機器人使用 24V 電源。我們需要一些東西來翻譯信號。幸運的是,這并不像聽起來那么困難。由于它是相當現代的機器人,它具有 IEC 61131-2 標準的 3 類輸入,這意味著它在 24V 時僅吸收幾毫安的電流。我們僅以一種方式從 MiniZed 向機器人發送信號,因此我們的定制 PMOD 僅需要一個電阻器(適合與 LED 一起使用)和每個通道的光隔離器。這是我們的電路圖。右側是我們可能在機器人中找到的近似值。您會明白為什么我們只需要一個晶體管來驅動它。
將這個電路焊接到一塊條板上真的不需要很長時間。唯一可能有所改進的是大約 90 度的接頭銷,因此它與 MiniZed 平齊。有時最好只使用手頭的東西。
修改 Mini but Mighty 代碼
Adam Taylor 最初的 Mini but Mighty 示例使用了一個 GPIO 和一個 PWM 輸出。這里我們使用 4 個 GPIO。我們需要在 Vivado(用于硬件設計)和 Vitis(用于軟件)中進行一些小的修改。
為了使本指南簡潔明了,我不會重復原文中的所有內容。一旦您完成了這項工作,我將只解釋差異。
Vivado 的變化
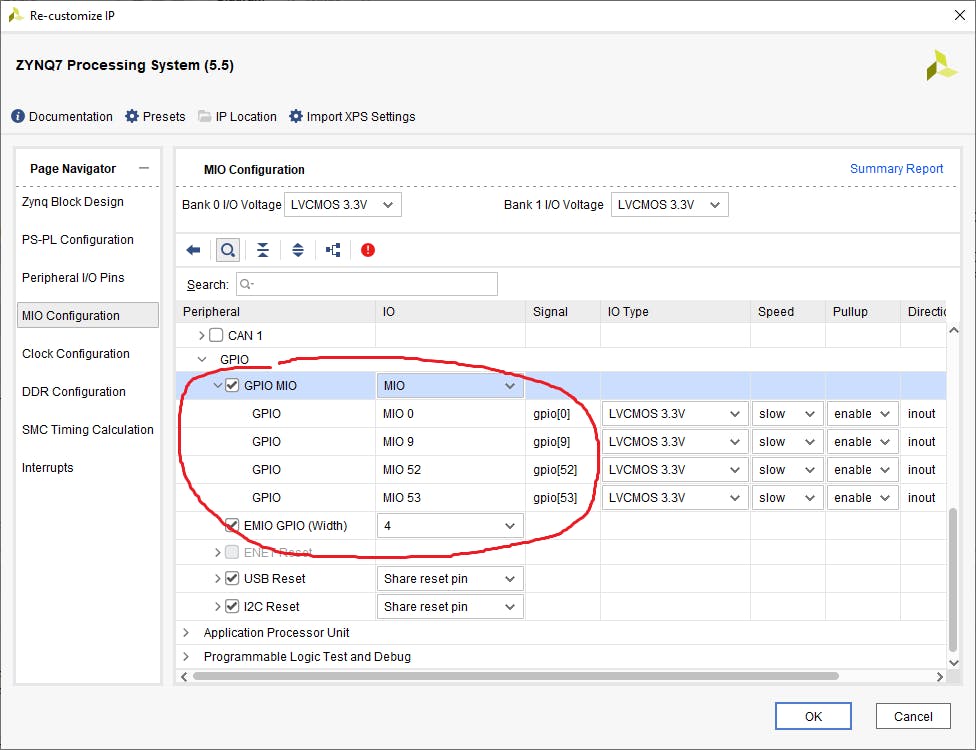
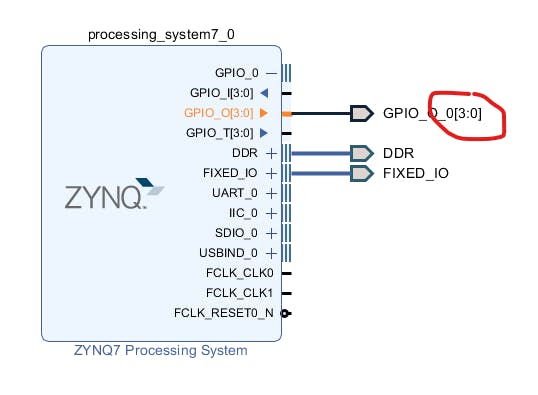
Vivado 中沒有太多變化。在原始項目使用一個 GPIO 的地方,我們只需要選擇 4 個。我們不再需要 TTC(三重定時器計數器),但保留它也沒有壞處。不要忘記像您一樣將這些新的 GPIO 設置為外部與單一的。我已經敲響了以下所需的更改:
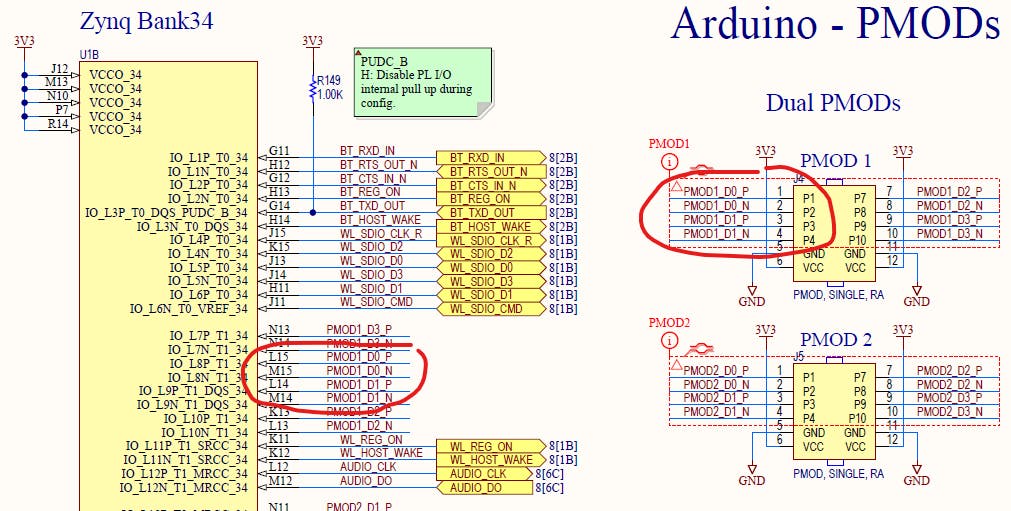
為了將這些連接到外部世界,我們需要將它們映射到 PMOD 1 上的前 4 個引腳。我將不只是告訴您使用哪些引腳,而是解釋如何找到它們。這是為了防止您想做一些稍微不同的事情。您需要 MiniZed 的原理圖,網址為http://zedboard.org/support/documentation/18891
在這里您可以看到它們是 L15(與原來的一樣)、M15、L14 和 M14。
這導致我們更新我們的約束文件以啟用這些。完成這些更改后,只需導出硬件并按照原始指南啟動 Vitis。
# MiniZed PMOD 1 pins 1-4 as GPIO output
set_property PACKAGE_PIN L15 [get_ports GPIO_O_0[0]]
set_property PACKAGE_PIN M15 [get_ports GPIO_O_0[1]]
set_property PACKAGE_PIN L14 [get_ports GPIO_O_0[2]]
set_property PACKAGE_PIN M14 [get_ports GPIO_O_0[3]]
set_property IOSTANDARD LVCMOS33 [get_ports GPIO_O_0[0]]
set_property IOSTANDARD LVCMOS33 [get_ports GPIO_O_0[1]]
set_property IOSTANDARD LVCMOS33 [get_ports GPIO_O_0[2]]
set_property IOSTANDARD LVCMOS33 [get_ports GPIO_O_0[3]]
葡萄的變化
我們需要在 Vitis 中進行的更改是使用所有四個 GPIO。我們還可以放棄用于處理 PWM 的定時器相關代碼。在更改之前,我特意在源代碼管理下檢查了原始代碼,因此您可以準確地看到添加和刪除的內容。
我不確定的一件事是為什么我們在代碼中訪問第一個 GPIO 引腳作為引腳 54。我猜 0-53 號針腳用于 MIO 針腳,54 號以上用于 EMIO 映射針腳,盡管我還沒有找到記錄它的地方。不管為什么,3 個額外的 GPIO 是引腳 55-57。
您可以在https://github.com/FredMurphy/MiniZed_MightyRobot找到 Vivado 和 Vitis 的所有源代碼
將其連接到機器人
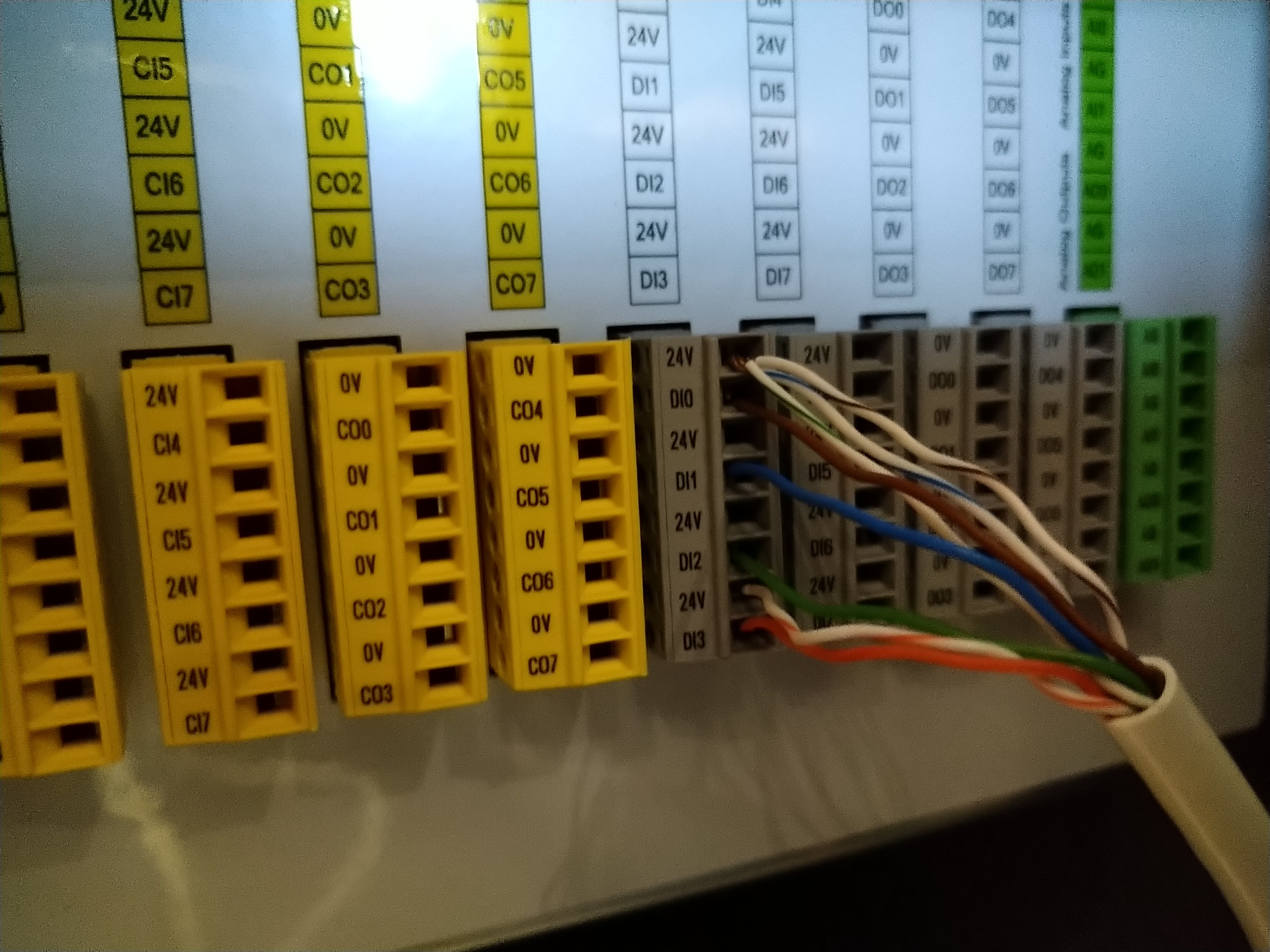
我們需要做的第一件事是檢查 GPIO 是否連接到機器人并被視為更改輸入。一點 8 芯 CAT5E 以太網電纜被證明是有用的,我將我們的 4 個輸出(加上 24V)連接到機器人上的 4 個數字輸入。
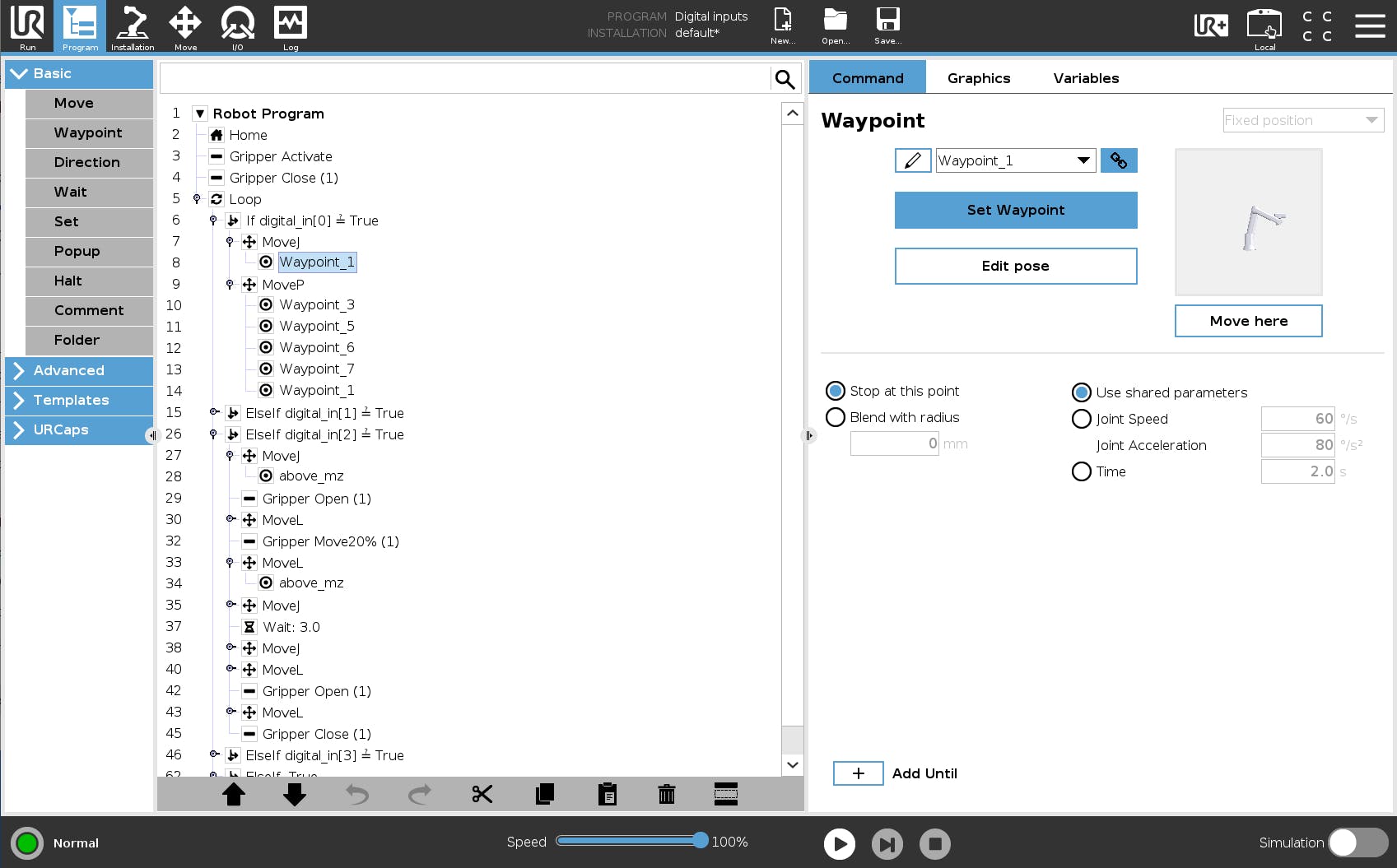
在這里你可以看到我的第一個 GPIO 被檢測為數字輸入 1 上的高輸入。它只是屏幕上的一個小復選框,但它意味著大事!

?
機器人編碼
與 Zynq 相比,為機器人編程是輕而易舉的事。基礎知識主要涉及設置幾個航路點并告訴它到達那里的速度。如果你想讓它做更高級的東西,它還有更多的東西,但它真的沒有那么難。這是示教器上顯示的我們的機器人程序。您可以在源代碼存儲庫中看到這一切。
?
我使用了一個非常簡單的程序,它將每個 GPIO 映射到一個序列。顯然,可以做得更多。我們的 4 個輸入為我們提供了 16 種組合可供使用 - 盡管將它們組合為 4 位并行總線并不是內置的。機器人不直接支持 PWM,但它有一個 0-12V 模擬輸入,所以我可以保留原始 PWM 輸出,對其進行平滑處理并用它來控制機器人的速度。
如果您想了解有關工業機器人編程的更多信息,可以在此處使用模擬來完成。您必須創建一個帳戶,但除此之外都是免費的。
演示
好吧,如果我們沒有看到 MiniZed 和機器人在行動,那就沒有樂趣了,不是嗎?我希望您喜歡看到 MiniZed 可以與一些更大的東西交互,并且您受到啟發自己嘗試一些大東西!
?
?
- 瞳步迎賓講解機器人
- 瞳步消毒機器人方案
- ABB機器人CP中級應用培訓 12次下載
- 了解機器人電子教材下載 19次下載
- WorkVisual4.0機器人軟件手冊下載 22次下載
- 機器人無線充電電路設計 49次下載
- 基于Matlab的機構與機器人分析資料下載 13次下載
- 基于DSP和PC的農業機器人控制系統 18次下載
- 基于DSP的排險機器人車體控制系統 14次下載
- 基于DSP芯片的足球機器人實現與設計 27次下載
- 機器人PID控制概述 27次下載
- 機器人技術及其應用說明 4次下載
- 怎么樣才能設計仿人雙足機器人的機構 20次下載
- Arduino教學機器人的使用教程免費下載 38次下載
- 機器人設計教程之機器人控制和決策子系統 25次下載
- 鑄造機器人是什么?選擇工業機器人應該考慮的方向 1186次閱讀
- 面對疫情 醫療機器人能幫上什么忙? 2236次閱讀
- 機器人控制系統分類_機器人控制系統有哪些 2.6w次閱讀
- 工業機器人技術應用 5343次閱讀
- 工業機器人編程入門_工業機器人的編程要求 9787次閱讀
- 醫用機器人的定義_醫用機器人發展 3257次閱讀
- 醫用機器人的功能_醫用機器人分類 2462次閱讀
- 機器人控制器有哪些類型_機器人控制器發展 1.2w次閱讀
- 協作機器人的起源_為什么需要協作機器人 8322次閱讀
- 機器視覺的機器人取代四臺傳統的火焰處理機器人 3370次閱讀
- 如何區分機器人、協作機器人和移動機器人? 7029次閱讀
- 軟體機器人 前所未見的機器人 3770次閱讀
- 機器人的最佳編程語言是什么?機器人十大流行編程語言匯總 3.5w次閱讀
- foxbot機器人的優點及用途介紹 1.7w次閱讀
- 如何使用HRMRP機器人平臺構建機器人應用系統 1699次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1A7159和A7139射頻芯片的資料免費下載
- 0.20 MB | 55次下載 | 5 積分
- 2PIC12F629/675 數據手冊免費下載
- 2.38 MB | 36次下載 | 5 積分
- 3PIC16F716 數據手冊免費下載
- 2.35 MB | 18次下載 | 5 積分
- 4dsPIC33EDV64MC205電機控制開發板用戶指南
- 5.78MB | 8次下載 | 免費
- 5STC15系列常用寄存器匯總免費下載
- 1.60 MB | 7次下載 | 5 積分
- 6模擬電路仿真實現
- 2.94MB | 4次下載 | 免費
- 7PCB圖繪制實例操作
- 2.92MB | 2次下載 | 免費
- 8零死角玩轉STM32F103—指南者
- 26.78 MB | 1次下載 | 1 積分
本月
- 1ADI高性能電源管理解決方案
- 2.43 MB | 452次下載 | 免費
- 2免費開源CC3D飛控資料(電路圖&PCB源文件、BOM、
- 5.67 MB | 141次下載 | 1 積分
- 3基于STM32單片機智能手環心率計步器體溫顯示設計
- 0.10 MB | 137次下載 | 免費
- 4A7159和A7139射頻芯片的資料免費下載
- 0.20 MB | 55次下載 | 5 積分
- 5PIC12F629/675 數據手冊免費下載
- 2.38 MB | 36次下載 | 5 積分
- 6如何正確測試電源的紋波
- 0.36 MB | 19次下載 | 免費
- 7PIC16F716 數據手冊免費下載
- 2.35 MB | 18次下載 | 5 積分
- 8Q/SQR E8-4-2024乘用車電子電器零部件及子系統EMC試驗方法及要求
- 1.97 MB | 8次下載 | 10 積分
總榜
- 1matlab軟件下載入口
- 未知 | 935121次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關降壓/升壓雙向直流/直流轉換器 PCB layout 設計
- 1.48MB | 420062次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233088次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191367次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183335次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81581次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73810次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網監
工商網監
評論