 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問(wèn)
提問(wèn)  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
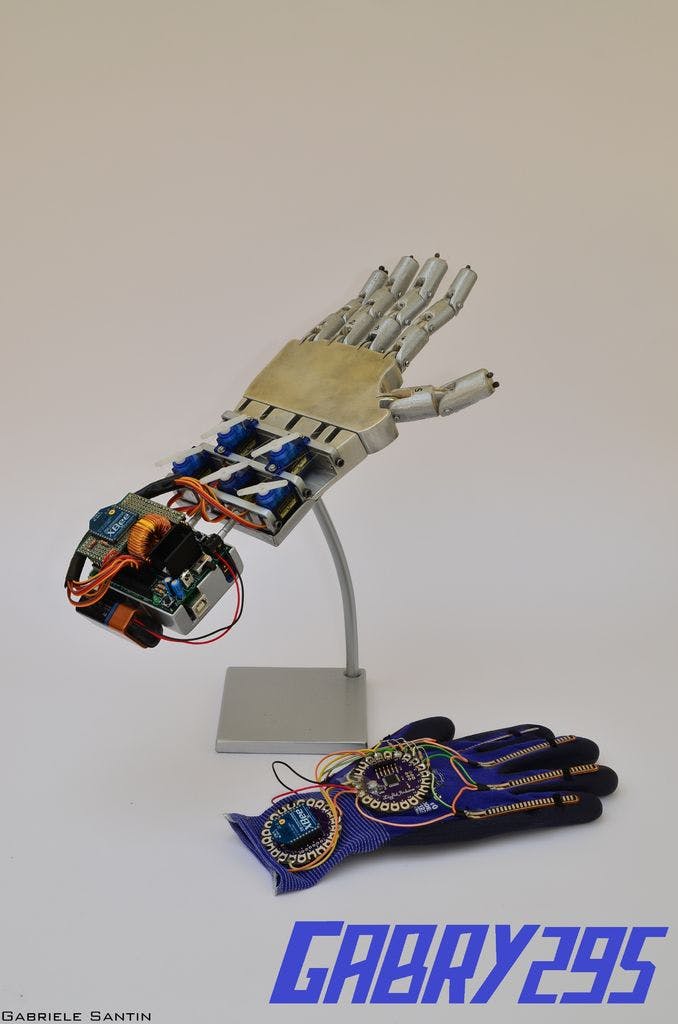
這是我高中五年級(jí)的學(xué)校項(xiàng)目(我是意大利人,我們有 5 年的高中)。
它包含一只由帶有柔性傳感器的手套控制的人造手。仿真手通過(guò)無(wú)線(xiàn)方式再現(xiàn)了帶有控制手套的手的動(dòng)作。手和手套都適用于 Arduino。
我只是想為所有感興趣的人分享我的工作:)
本指南仍在開(kāi)發(fā)中,抱歉,如果某些部分不清楚,我會(huì)在以后放一些 3D 圖像。
第 1 步:所需材料
1 / 4
控制手套的材料:
?彈性手套;
?LilyPad Arduino板(有不同的版本,通常只有 4 個(gè)模擬輸入,所以請(qǐng)注意并購(gòu)買(mǎi)圖中的那個(gè)):它的工作原理與經(jīng)典的 Arduino UNO 完全一樣,因此您甚至可以使用 Arduino Nano,但要付費(fèi)注意所需的電壓;
?XBee 模塊:用于無(wú)線(xiàn)電通信;
?用于連接X(jué)bee模塊的屏蔽層;
? 5 個(gè)柔性傳感器;
? 5 個(gè)電阻:47 KΩ;
?帶3x1.5 V電池的電池組(Lilypad 可以從2.7 到5.5 V 供電,所以4.5 V 沒(méi)問(wèn)題);
?LilyPad FTDI 適配器:將 LilyPad 板連接到 PC 并使用 Arduino IDE 加載程序(非常可選,因?yàn)槟部梢允褂?Arduino UNO 板移除 ATmega 芯片,但每次都進(jìn)行這種連接很棘手) .
-機(jī)械手的材料:
?手掌為鋼結(jié)構(gòu),手指為木結(jié)構(gòu)。
?Arduino UNO 開(kāi)發(fā)板;
?XBee 模塊;
? 5 個(gè)伺服電機(jī)5V 供電(我用的是 TowerPro SG90);
? Arduino UNO 的伺服電機(jī)屏蔽:為了連接伺服電機(jī),我使用了FuturaElettronica的 Robot_Shield,它還有一個(gè)開(kāi)關(guān)穩(wěn)壓器來(lái)為整個(gè)電路供電,但您可以使用任何用于控制伺服電機(jī)的屏蔽。鏈接:https://store.open-electronics.org/index.php?_rou... ;
?用于連接X(jué)Bee模塊的屏蔽(我做了一個(gè)糟糕的,但它很經(jīng)濟(jì),而且由于Robot_Shield 的尺寸,我需要做一個(gè)小的);
?釣魚(yú)線(xiàn);
?(可選)釣魚(yú)墜子,用于固定釣魚(yú)線(xiàn),也可以簡(jiǎn)單地打個(gè)結(jié);
?9 伏電池。
- 需要的工具:
?角磨機(jī)(主要用于切割木材和鋼材);
?軸向磨床;
?焊機(jī)(帶電極);
?鉆孔;
?焊臺(tái)和焊料;
? 電工剪刀;
?鉗子;
?熱縮管。
第 2 步:制作手套
1 / 4
要制作控制手套,我建議首先選擇不同組件的正確位置,然后用適當(dāng)長(zhǎng)度的電線(xiàn)連接所有部件。
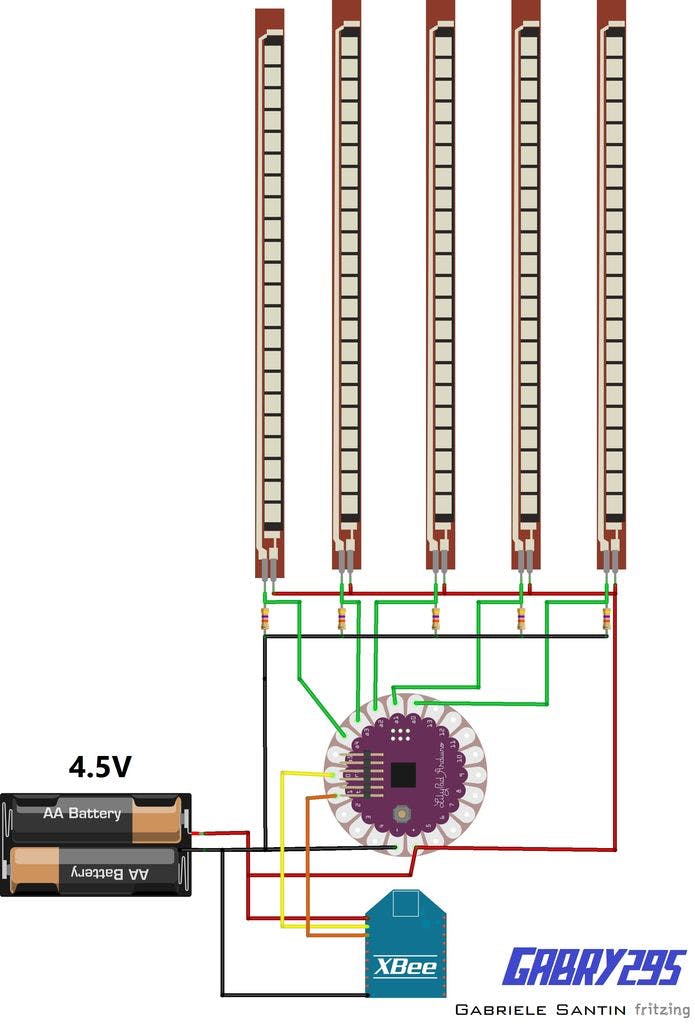
要使用 Arduino LilyPad 進(jìn)行模擬讀取,您需要制作一個(gè)分壓器,因?yàn)槿嵝詡鞲衅鞑幌?a target='_blank' class='arckwlink_none'>電位器那樣工作(它們只有 2 個(gè)觸點(diǎn))。
所以按照方案,首先將 5 個(gè)電阻焊接到 LilyPad 板上,一側(cè)連接到 5 個(gè)不同的模擬引腳,另一側(cè)共同接地。然后焊接柔性傳感器,一側(cè)連接到 5 個(gè)不同的模擬引腳,另一側(cè)連接到正極。
然后連接 XBee Shield:兩根線(xiàn)用于電源,另外兩根用于信號(hào)。將 Tx 引腳焊接到 Rx,反之亦然。
現(xiàn)在你需要電池組和手套了。
小心:不要為 Arduino LilyPad 供電超過(guò) 5.5 V,也不要反過(guò)來(lái)供電(即使有時(shí)我錯(cuò)誤地做到了......它仍然有效!)
第 3 步:制作機(jī)械手

1 / 11
這是最復(fù)雜的部分,因?yàn)槟惚仨氝x擇合適的材料來(lái)制作手,但如果你有可能 3D 打印手也可以很容易(網(wǎng)上有許多不同的 3D 項(xiàng)目用于打印手部分).
我開(kāi)始用軟木做手指,為動(dòng)作找到合適的結(jié)構(gòu),然后我用樹(shù)枝做。
因此,每個(gè)手指制作三個(gè)木制圓柱體,其中兩個(gè)比指骨的正常長(zhǎng)度高出 1 厘米,需要將一個(gè)圓柱體放入另一個(gè)圓柱體中。
然后用角磨機(jī)制作凹槽,使零件裝配在一起(看圖片,你會(huì)更好地理解)。
您需要一些砂紙來(lái)使零件彎曲,以便它們可以旋轉(zhuǎn)。
使用鉆頭為鉸鏈打孔,然后你必須為釣魚(yú)線(xiàn)打另外兩個(gè)孔,垂直,一個(gè)朝向手的內(nèi)側(cè),一個(gè)向外。所以當(dāng)電線(xiàn)放在手指的頂部時(shí),當(dāng)你向內(nèi)拉一根時(shí),手指會(huì)閉合,當(dāng)你向外拉時(shí),手指會(huì)張開(kāi)。
手掌有問(wèn)題,因?yàn)槲易畛跏怯媚绢^做的,而且較薄的部分總是壞掉。所以我決定用鋼做它,我沒(méi)有遇到任何問(wèn)題。
切割它并做一些類(lèi)似于為手指制作的突起以將它們固定到手掌上(參見(jiàn)圖像作為參考)。然后用鉆頭為釣魚(yú)線(xiàn)鉆其他孔,拇指會(huì)很棘手,因?yàn)樗幌衿渌种改菢哟怪薄?/p>
制作好手之后,需要制作五個(gè)伺服電機(jī)的支架和Arduino UNO板的支架。一定要選擇正確的舵機(jī)位置,這樣它們?cè)谛D(zhuǎn)時(shí)不會(huì)相互接觸。
最后一部分是將手指連接到伺服電機(jī):將魚(yú)線(xiàn)固定在手指的頂部并使其穿過(guò)孔;然后,當(dāng)電線(xiàn)位于手的底部時(shí),以最大旋轉(zhuǎn) (180°) 轉(zhuǎn)動(dòng)轉(zhuǎn)子(手動(dòng),不通電),使其處于垂直位置,然后將閉合手指的電線(xiàn)設(shè)置為最低轉(zhuǎn)子的孔,例如打結(jié);再次轉(zhuǎn)動(dòng)轉(zhuǎn)子 0°(再次垂直,之前打的結(jié)在頂部)然后將另一根線(xiàn)(打開(kāi)手指)設(shè)置到轉(zhuǎn)子的最低孔。按照此步驟中的最后一張圖片可以更好地理解。
因此,當(dāng)電機(jī)處于 0°(垂直)時(shí),手指打開(kāi),當(dāng)轉(zhuǎn)子處于 180°(再次垂直)時(shí),手指閉合。
第 4 步:機(jī)械手電路
1 / 7
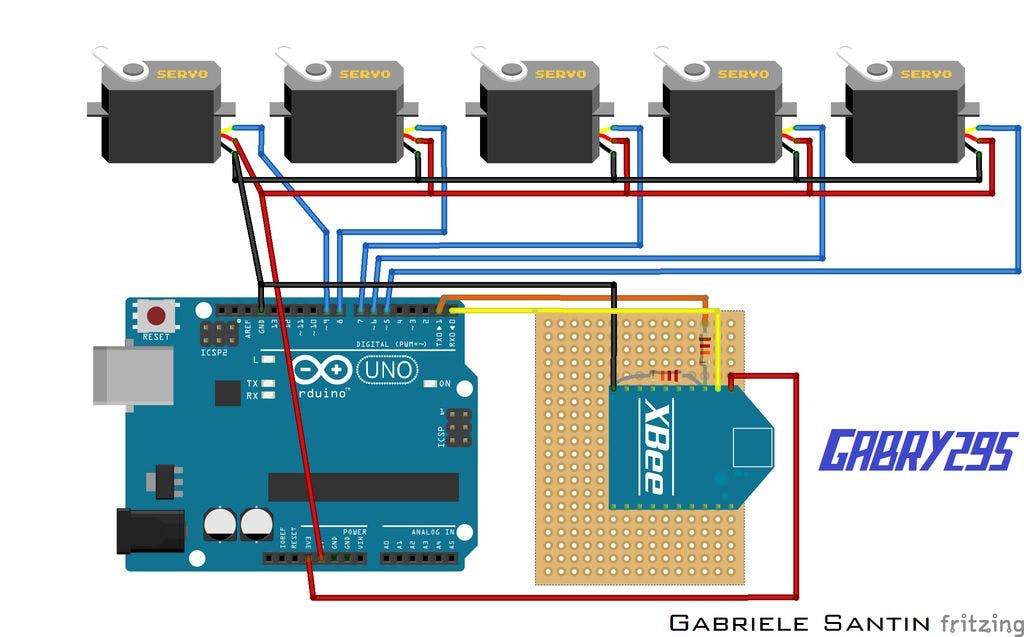
對(duì)于電路,您可以選擇使用 Arduino UNO 的伺服電機(jī)屏蔽(在 eBay 或亞馬遜上搜索)和 XBee 屏蔽,或者使用 XBee 模塊和引腳制作自定義屏蔽(我會(huì)盡快制作)用于伺服電機(jī),并通過(guò)其插孔端口為 Arduino UNO 供電。
我自己DIY的XBee Shield用了一個(gè)12KOhm的電阻和一個(gè)22KOhm的電阻,大家可以看圖中的接線(xiàn)。
所以我使用了我之前買(mǎi)的東西,但是你可以使用任何可以控制伺服電機(jī)和 XBee 的東西。
伺服電機(jī)有 3 根線(xiàn):
黃色:信號(hào)(連接到數(shù)字引腳);
紅色:電源(+5 V);
棕色:接地(GND)。
所以現(xiàn)在你不會(huì)犯錯(cuò)了:)
我使用了最簡(jiǎn)單的伺服電機(jī),工作電壓為 5 V,旋轉(zhuǎn)角度為 180 度(這是完美的角度,我們不需要更多)。
電腦的USB接口無(wú)法提供足夠的電力來(lái)控制5個(gè)伺服電機(jī),所以我建議使用12V電源測(cè)試一切,然后使用9V電池(最好是堿性電池)。
第 5 步:程序
手和手套的程序以及所有描述都在下面的鏈接中。
請(qǐng)記住:要加載程序,您必須移除連接到 Arduino 的 TX 和 RX 引腳的所有內(nèi)容(在本例中為 XBee 模塊),否則程序?qū)o(wú)法加載。還要記住在 IDE 中設(shè)置正確類(lèi)型的 Arduino(LilyPad 或 Arduino UNO)。
?
- 如何制作無(wú)線(xiàn)/手勢(shì)控制機(jī)械手
- 平面關(guān)節(jié)型機(jī)械手設(shè) 0次下載
- 手動(dòng)機(jī)械手程序資料 3次下載
- ABB機(jī)械手操作手冊(cè) 18次下載
- 如何使用Arduino紅外控制進(jìn)行智能機(jī)械手的設(shè)計(jì)資料和程序免費(fèi)下載 5次下載
- 機(jī)械手圖冊(cè)——機(jī)械手設(shè)計(jì)必看 77次下載
- _基于Arduino的體感機(jī)械手設(shè)計(jì) 8次下載
- 東芝機(jī)械手操作 7次下載
- 基于PLC的機(jī)械手控制設(shè)計(jì)(畢業(yè)設(shè)計(jì)) 0次下載
- 采用單片機(jī)控制機(jī)械手的設(shè)計(jì) 329次下載
- 基于PLC的機(jī)械手混合驅(qū)動(dòng)控制 101次下載
- 基于PLC的工業(yè)機(jī)械手無(wú)線(xiàn)遙控系統(tǒng)
- 機(jī)械手的順序控制系統(tǒng)的設(shè)計(jì)
- 基于 CAN 總線(xiàn)的機(jī)械手控制系統(tǒng)The Control S
- PLC控制機(jī)械手設(shè)計(jì)
- PLC在機(jī)械手控制系統(tǒng)中的具體應(yīng)用 1656次閱讀
- 各類(lèi)機(jī)械手的工作原理和功能特點(diǎn) 3139次閱讀
- 用三菱PLC控制機(jī)械手實(shí)例 7159次閱讀
- Qt開(kāi)發(fā)實(shí)現(xiàn)SCARA機(jī)械手正反解的建立 1368次閱讀
- SCARA機(jī)械手視覺(jué)伺服精確定位技術(shù)的研究 3599次閱讀
- 基于SJA1000芯片和82C250芯片實(shí)現(xiàn)機(jī)械手控制系統(tǒng)的設(shè)計(jì) 1971次閱讀
- 分享機(jī)械手各部位主要結(jié)構(gòu)元件種類(lèi)處理組件等 2.1w次閱讀
- 機(jī)械手內(nèi)部是什么樣的嗎?部位結(jié)構(gòu)種類(lèi)分析 1.2w次閱讀
- 搬運(yùn)機(jī)械手有哪些形式 5176次閱讀
- 視覺(jué)與機(jī)械手標(biāo)定系統(tǒng)技術(shù)解決方案 6872次閱讀
- 桁架式機(jī)械手的808D系統(tǒng)技術(shù)分析 3865次閱讀
- 機(jī)械手運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì) 9098次閱讀
- 西門(mén)子PLC入門(mén)級(jí)應(yīng)用實(shí)例,簡(jiǎn)易機(jī)械手的控制 1.7w次閱讀
- 基于RFID技術(shù)的機(jī)械手生產(chǎn)框架管理 703次閱讀
- 可視化遠(yuǎn)程遙控移動(dòng)機(jī)械手設(shè)計(jì)與實(shí)現(xiàn) 1366次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊(cè)
- 1.06 MB | 532次下載 | 免費(fèi)
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費(fèi)
- 3TC358743XBG評(píng)估板參考手冊(cè)
- 1.36 MB | 330次下載 | 免費(fèi)
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費(fèi)
- 5元宇宙深度解析—未來(lái)的未來(lái)-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費(fèi)
- 6迪文DGUS開(kāi)發(fā)指南
- 31.67 MB | 194次下載 | 免費(fèi)
- 7元宇宙底層硬件系列報(bào)告
- 13.42 MB | 182次下載 | 免費(fèi)
- 8FP5207XR-G1中文應(yīng)用手冊(cè)
- 1.09 MB | 178次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開(kāi)關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊(cè)免費(fèi)下載(新編第二版pdf電子書(shū))
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動(dòng)電路設(shè)計(jì)》 溫德?tīng)栔?/a>
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191187次下載 | 免費(fèi)
- 7十天學(xué)會(huì)AVR單片機(jī)與C語(yǔ)言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論