 電子發燒友App
電子發燒友App


引言
隨著網絡和通信技術的發展,嵌入式系統現已進入高速發展階段。并在社會各個領域得到了廣泛的應用。本文介紹了一種采用ARM+uCLinux作為開發平臺。實現基于TCP/IP的遠程系統監控.從而取代傳統單片機來實現數據采集、預處理和通信功能;并依靠互聯網將數據向上位機傳送,同時支持遠端客戶對設備進行遠程控制,從而實現遠程監控功能的具體方法。
1 系統平臺的構建
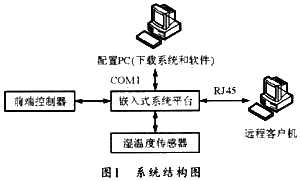
本系統由嵌入式平臺服務器、前端控制器、前端傳感器、客戶端和配置PC組成。開發時可通過配置PC來下載系統和應用軟件。嵌入式系統平臺能夠收集現場數據。并傳送到遠端客戶機,之后由遠端客戶機對數據進行處理,接著發送控制信號給系統服務器,以便通過前端控制器對設備進行遠程控制。其系統結構如圖1所示
1.1 硬件開發平臺
該系統的硬件開發平臺可選擇SmartARM2200。該嵌入式設備的核心是ARM7TDMI的LPC2210.開發板自身具有A/D轉換器和多個GPIO(通用I/O)口,可對工業現場的各種設備、儀表進行數據采集和監控。使用時,只要將相應的傳感器信號接入控制器的端口即可。其開發板系統的硬件配置如圖2所示。

1.2 uCLinux操作系統
操作系統是嵌入式設備軟件的核心部分。本系統采用uCLinux系統平臺來完成對硬件系統的管理和維護。uCLinux是廣泛應用于微控制領域的一種嵌入式Linux操作系統。它通過對標準Linux內核的裁減,可去除虛擬內存管理部分代碼,以對內存分配進行優化。從而達到提高系統運行效率的目的。uCLinux則可經過各方面的小型化改造形成一個高度優化、代碼緊湊的嵌入式Linux,它保留了Linux的大多數優點,包括穩定、良好的移植性、優秀的網絡功能、完備的文件系統支持、豐富的API等。
1.3 uCLinux在ARM平臺上的移植
若將uCLinux移植到SmartARM2200上,需要進行以下四個步驟:
(1)下載源碼,建立交叉編譯環境
uCLinux是自由軟件(完全開放代碼)。用戶可以直接從http://www.uclinux.org/pub/uclinux處下載源代碼并安裝到Red Hat9.0系統下,以便正常在Red Hat9.0建立起交叉編譯環境。
(2)配置和編譯內核
進入到安裝好的uCLinux目錄,依次執行下面的命令:
make menuconfig;進入配置菜單后,選擇Vendor/Product(廠商/產品)下的PHILIPS/lpc2200;用Kernel Version(內核版本)選擇Linux-2.4.x,Libc Version(函數庫版本)選擇uClibc:其余內核和應用程序選項可根據情況選擇。
make dep
make clean
make lib_only
make user_only
make romfs
make image
make
編譯結束后會在uCLinux安裝目錄下生成romfs.img文件,利用它可以制作RAM Disk,然后在linux-2.4.X目錄下生成elf格式的Linux內核文件,并以下列方式將其轉換成bin格式
#arm-elf-objcopy-O binary linux linux.bin
從而生成下載用的uCLinux內核鏡像文件linux.bin。
(3)制作Ram Disk掛栽根文件系統
首先創建一個512 kB的虛擬磁盤,并將虛擬磁盤文件格式轉化成ext2格式:
dd if/dev/zero of=initrd.img bs=1024 count=512
mkfs.ext2-c init.img
然后將init.img和romfs.img加載到主機文件系統上,并在RAM中建立需要的目錄:/bin,/dev,/etc,/var,進而拷貝ROM中的文件到ram目錄中。
下來在RAM盤dev目錄下創建設備節點:
#mknod ram/dev/ttyS0 c 4 64
#mknod ram/dev/console c 5 1
最后卸載init.img和romfs.img,并應確保init.img修改已保存,至此,RAM DISK便創建完成。
(4)下載內核和文件系統
正確設置主板啟動選擇跳線。主板加電后,在超級終端上便可以看到BootLoader引導信息,可選擇默認的FTP連接,并使用BootLoader默認的IP進行下載,然后啟動gftp,輸入主板默認的IP和端口號。這樣,linux主機就可以和主機連接,最后選擇需要下載的Linux內核文件和RAM盤及相關的配置文件即可。
2 監控系統功能的實現
監控系統主要由3個部分組成:數據采集部分,設備控制部分,數據傳輸部分。數據采集部分可對傳感器信號進行A/D轉換,并對采集到的數據進行簡單的處理,同時提供調整運行參數的接口。數據傳輸部分可將采集的數據傳送到遠端的主機,并接收遠端主機的控制信息。遠端主機則對傳輸過來的遠程數據進行處理、存儲和顯示,并可以修改數據采集部分的參數以控制數據采集,同時依據采集到的數據對設備發出操作指令,或對遠端的設備進行控制,從而實現遠程監控功能。
2.1 數據采集
使用A/D轉換設備前,首先要創建設備節點,并加載ADC驅動,然后通過open()和close()將其打開和關閉.主要的數據采集程序如下:
……
ioctl(fd,ADC_SET_CLKDIV,(Fpclk+fadc1)/fadc-1);//設置A/D轉換速度
ioctl(fd,ADC_SET_BITS,10);//設置A/D轉換精度;
while(1) {
ad_data=0;
read(fd,&ad_data,sizeof(ad_data));//讀取A/D轉換的值;
……
2.2 GPIO設備控制
同A/D轉換設備類似,使用GPIO也需先創建設備節點并加載驅動。對GPIO操作前,應通過open()打開,使用后應通過close()關閉。
首先。選定開發板上沒有使用過的GPIO端口,設定其輸入/輸入狀態,然后根據客戶端返回的信息對端口進行操作,輸出0/1的電平,以使其外部連接的繼電器動作。從而控制設備的運轉。程序主要通過函數ioctl來實現。ioctl是設備驅動程序中對設備的I/O通道進行管理的函數,通過它可對設備的一些特性進行控制.其函數原形為:
int ioctl(int fd,ind cmd,…);
其中,fd是用程序打開設備時,使用open函數返回的文件標示符;cmd是用戶程序對設備的控制命令;至于后面的省略號,則是一些補充參數(一般最多一個,有或沒有是和cmd的意義相關的)。在這里,可通過如下一組函數來實現:
ioctl(fd1,GPIO_SET_PIN_IN,devicel);
//設置管角為輸出狀態;
ioctl( fd2, GPIO_SET_PIN_OUT, devicel_state);
//設置管角為輸入狀態;
ioctl(fd2,GPIO_READ_PIN,&devicel_state);
//讀取設備狀態管角;
ioctl(fd1,GPIO_CLR_PIN,device);
//清除設備管角控制信號;
2.3 網絡通信程序
網絡通信程序可使用TCP/IP協議下標準的socket套接字編寫。套接字(socket)是網絡通信的基本操作單元。它提供了不同主機間進程雙向通信的端點。這些進程在通信前應各自建立一個socket,并通過對socket的讀/寫操作實現網絡通信功能。常用的套接字有兩種:流式套接字(Stream Socket)和數據報套接字(Datagram Socket)。其中,流式套接字是可靠的面向連接的通信數據流,是無錯誤的傳輸;而數據報套接字則使用UDP來傳送數據包,數據包的順序是沒有保障的。本系統采用流式套接字進行程序設計。
流式套接字的服務進程和客戶進程建立連接及通信的程序流程如圖3所示。現具體說明如下:
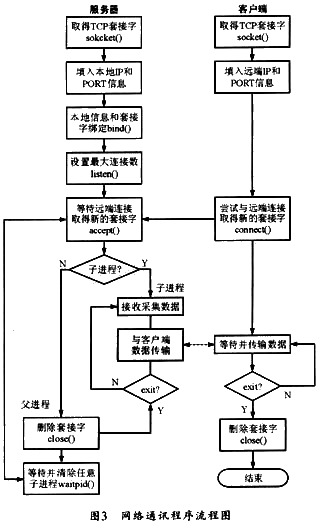
(1)服務進程首先調用socket()創建一個流式套接字,并調用bind()將服務器地址捆扎在該套接字上,接著調用listen()監聽連接請求,隨后調用accept()做好與客戶進程建立連接的準備。無連接請求時,服務進程被阻塞;
(2)客戶進程先調用socket()創建流式套接字,然后調用connect()向服務進程發出連接請求;
(3)當連接請求到來后,服務進程被喚醒,并生成一個新的流式套接字。同時用新套接字同客戶進程的套接字建立連接,而服務進程最早生成的套接字則繼續用于監聽網絡上的服務請求;
(4)服務進程和客戶進程通過調用send()和recv()來交換數據,服務器可向客戶端傳送所收集的數據。客戶端則向服務器反饋控制信息和參數調整信息;
(5)服務進程或客戶進程可通過調用close()來撤消套接字并中斷連接。
服務器端的程序通過交叉編譯環境編譯后。可通過NFS(網絡文件系統)下載到開發板中,然后手動加入到rc引導文件中。即可實現開機自動運行
3 結束語
基于ARM和CLinux嵌入式系統代表了目前嵌入式系統的發展方向。嵌入式系統與網絡技術和控制技術相結合.是嵌入式系統發展的必然趨勢。本文討論了基于ARM+uCLinux平臺的網絡控制系統設計與實現方法。并對該平臺下應用TCP/IP協議進行網絡通信進行了探討。該方法對于自動化樓宇、工業控制、智能家居等方面都有一定的借鑒意義。










 工商網監
工商網監
評論