 電子發燒友App
電子發燒友App


在占地球總面積70%左右的海洋上無法建立基站,由此迫切需要穩健的船載衛星通信系統。船載衛星通信系統研究主要包括系統配置設計、控制策略、硬件選型和監控系統的設計。為了克服船體的運動,三軸隨動控制系統采用模糊PID算法,根據一系列的對星策略以使船體在運動中始終對準衛星,實現實時通信。采用FPGA芯片作為陀螺儀溫度補償數據處理系統,可使整個隨動系統更為精準快速。監控系統舍棄較為傳統的客戶端/服務器架構,選擇瀏覽器/服務器架構。通過模擬測試,驗證了船載衛星通信系統具有較好的性能和友好的應用性。
由于海上缺少固定的通信中繼站,而船載衛星通信系統正好可以充當海上的通信中繼站,我國要建設成為海洋強國,海洋通信必不可少,由此迫切需要高性能的船載衛星通信產品。于是開發高性能的船載衛星通信跟蹤系統具有重要的現實意義。
正是基于該目的,船載衛星通信系統采用了GPS獲取三軸的絕對地理坐標,配以電子羅盤測量三軸理論角度,加上基于現場可編程邏輯門陣列(Field Programmable Gate Array,FPGA)的溫度補償過的三軸陀螺儀測量三軸的瞬時速度來達到快速補償的目的,根據搜索算法和跟蹤算法使整個隨動系統在模糊PID控制算法下更為精準快速地實現對星。為了監控船載衛星通信系統的性能以及實現對船載衛星通信系統的人為操作,通過有線局域網或無線WiFi實現船載衛星通信系統與監控系統的相互連接,監控系統采用嵌入式Web服務器的瀏覽器/服務器(Browser/Server,B/S)架構。
1系統總體結構設計
1.1船載衛星通信工作過程
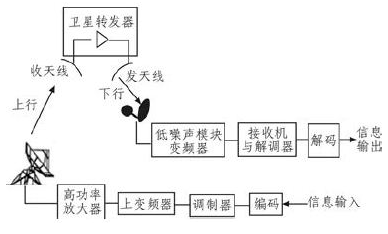
船載衛星通信系統的工作過程可以分成兩個部分,即發射過程和接收過程。發射過程將要傳輸的信息依次經過交換機和衛星調制解調器,由上變頻功率放大器(Block UpConverter,BUC)將信號調制成適合在無線環境中傳輸的信號,再由船載天線發射出去。船載接收過程則與發射過程相反,天線接收到的信號經過低噪聲下變頻器(Low Noise Block downconverter,LNB)濾波放大后送入定向耦合器,定向耦合器將接收到的信號分成兩路或多路,其中一路由衛星調制解調器完成解調用于業務;一路將作為信標機的信號源,用于測量目標衛星的信號強度,當然船載衛星通信系統與衛星之間的通信方式是全雙工的。
1.2船載衛星通信系統結構
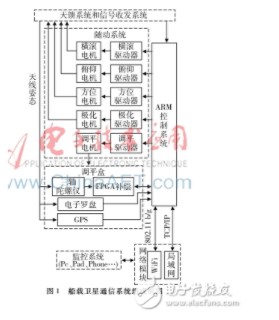
船載衛星通信系統研究的主要對象由ARM控制系統、控制天線姿態的隨動系統、調平盒模塊、監控系統、網絡模塊組成,其中調平盒模塊中含有為解決三軸陀螺儀零點漂移難題的基于FPGA的溫度補償子模塊。
船載衛星通信系統是以輪船為載體,載體在海水運動的干擾下不僅會有三維運動,而且運動軌跡沒有規律無法制定相應的規則。為了高效率、高精度地實現船載天線時刻保持對星的姿態,必須采取一系列的控制策略才能順暢地完成正常的通信。在茫茫大海上要想得到船載天線的狀態,可通過安裝在船載跟蹤系統上的全球定位系統(Global Positioning System,GPS)實時地獲取跟蹤系統的經、緯度信息,通過和目標衛星的經緯度計算得到船載衛星通信系統的天線對準衛星所需的理論位置和俯仰角,電子羅盤采集船載天線的航向角度、俯仰角度和橫搖角度,三軸陀螺儀測量三軸的瞬時速度來達到快速補償的目的[3]。ARM控制系統會根據所得到的天線狀態以及信標接收機反饋回來的信號強度實時地控制隨動系統使船載天線對準目標衛星。船載衛星通信系統組成框圖如圖1所示。
2硬件模塊設計
2.1陀螺儀溫度補償模塊設計
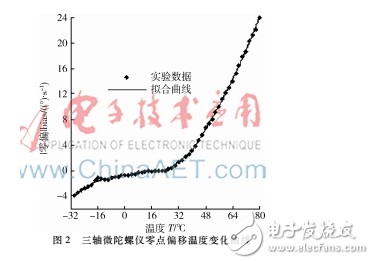
為了提高本系統的性價比,本設計沒有選擇昂貴的慣性導航系統而選擇使用型號為CRS0302的微機械陀螺儀,但微機械陀螺儀有嚴重的零點漂移問題,這是以前船載衛星通信系統中所不能解決的難點,本系統采用溫度補償策略克服三軸陀螺儀的溫漂問題。對于溫度補償的模型如果從材料原理方面用理論推導過于復雜,不如采用實驗的方法快速有效。實驗過程如下:將三軸陀螺儀放在可調的恒溫箱中,在-30℃~+80℃的溫度范圍內,每隔2℃測量一次零點偏移量;每次采樣15 min取平均值作為該溫度下三軸陀螺儀的零點偏量。圖2中用實心圓點表示測量的數據,實線是通過三次方基本擬合得到零點偏移量的擬合曲線方程,即:
當-30℃≤T≤-16℃時,
bias=-0.526 55+0.003 62t-0.004 51t2-0.000 03t3;
當-16℃≤T≤+24℃時,
bias=-0.723 14+0.047 63t-0.000 63t2;
當24℃≤T≤40℃時,
bias=-2.747 3+0.129 48t-0.002 04t2+0.000 06t3;
當40℃≤T≤80℃時,
bias=-12.843 7+0.429 476t-0.002 035t2+0.000 03t3
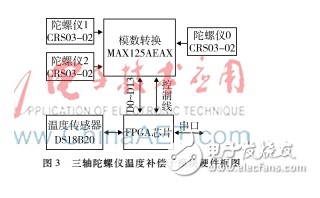
陀螺儀溫度補償模塊采用芯片MAX125AEAX完成模數轉換,該模數轉換有8個輸入通道分成兩組,每組的4個通道可以同時完成轉換任務。三軸陀螺儀可以用其中一組,另外一組留給其他輸出模擬信號的傳感器使用。溫度傳感器選用輸出數字量的DS18B20完成三軸微機械陀螺儀所處環境的溫度測量。FPGA芯片是這個子模塊的核心,它控制著模數轉換、溫度傳感器協同工作。根據實驗得到的4段陀螺儀溫度補償擬合曲線,在FPGA芯片內部寫成相應的補償程序就可以計算出不同溫度下三軸微機械陀螺儀的溫度偏移補償值;將陀螺儀數字量減去相應的補償值得到補償后的陀螺儀信號數字量,即可通過FPGA串口傳送給ARM控制系統,使得隨動系統能夠控制天線實時跟蹤到衛星。三軸陀螺儀溫度補償子模塊硬件框圖如圖3所示。
2.2網絡模塊
采用客戶端/服務器(Client/Server,C/S)模式的監控系統存在只能在本地監控、需要安裝某些特定的應用程序等弊端;而基于嵌入式Web的B/S架構監控方案是通過無線(WiFi)或有線(TCP/IP)實現嵌入式系統與其他設備(PC、Pad、Phone等)的連接。B/S架構可以有效地解決客戶端/服務器架構的不足。
為了實現B/S模式,網絡模塊采用無線網和有線網兩種方式,能夠很好地互補彼此的不足。有線電路由RJ45接口連接其他設備進行數據傳輸,通過DM9161BIEP芯片處理后傳送給ARM控制系統;考慮到監控系統要在手持終端上使用,于是需要配置WiFi無線模塊,為了提高本設計的進程,無線通信方式的硬件選用支持802.11a/b/g標準的威盛可插拔USB接口的無線模塊,直接通過USB接口實現與ARM控制系統的連接。硬件的應用還需要在嵌入式中移植無線網設備驅動和網絡互聯的基本配置。基于這些設計之后,系統監控只需要在客戶端設備安裝瀏覽器軟件即可。
2.3隨動系統
2.3.1隨動系統的模糊PID算法
根據反饋給ARM控制系統的天線情況,控制系統將控制5個步進電機的驅動器實現對步進電機的控制,為了提高隨動系統的控制速度和精度,本系統采用模糊PID算法。
傳統PID的3個參數Ki、Kp、Kd通過誤差整定,結構和算法相對簡單,而載體在海洋中的工作用傳統的PID很難滿足。模糊PID能夠根據偏差和偏差變化率自動調節PID的3個參數。參數整定有如下經驗:當偏差較大時,為使系統具有較好的跟蹤性能,取較大的Kp,Ki=0;當偏差和偏差變化率處于中等大小時,為了使系統響應具有較小的超調,Kp應取值小一些,Kd的取值對系統響應的影響較大,Ki的取值要適當;當偏差較小時,為使系統具有較好的穩定性能,Kp與Ki均應取得大些,為避免系統在設定值附近出現震蕩,Kd的取值相當重要,一般在偏差變化率較小時,Kd取值應該較大,反之則反。在系統運行時實時檢測偏差和偏差變化率的值,根據模糊規則在線修改PID的3個參數,使得PID參數可自整定,以滿足不同偏差和偏差變化率對控制參數的要求。
2.3.2船載天線的搜索算法和跟蹤算法
利用電子羅盤和雙GPS測姿儀能直接定位載體的方位角,所以船載天線可以直接或間接地走到理論方位。搜索模式采用畫框模式,就是以理論位置為中心向外畫框,隨著搜索的進行畫的框越來越大。畫框的同時監控自動增益控制(Analog Gain Control,AGC)的變化,如果超過門限,立即停止畫框進入跟蹤模式。若畫框搜索完設定的圈數后還沒有找到衛星,則重新走到理論位置,再次進行畫框搜索。應用人員也可以根據實際情況在監控系統中調節方位、俯仰的步進角度和畫框圈數。畫框搜索算法的船載天線波束的運動軌跡如圖4所示。

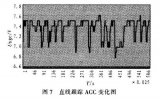
畫框搜索監控到目標衛星的AGC超過門限值后立即進入圓錐跟蹤狀態。圓錐跟蹤狀態是船載天線進行通信時所保持的狀態,在該狀態下,程序會控制天線做軌跡為圓的圓周運動,根據AGC的差值計算天線需要調整的角度,通過對方向圖的擬合,發現超過門限值的方向圖成二次曲線。將固定相差角度的兩點AGC與這兩點的中心距離方向圖中AGC最大點兩者的分布進行擬合,發現線性度很高,R2=0.949 3。所以用左右兩點多的AGC的差值乘以一個系數就可以作為調整的角度。最終使得船載天線始終指向目標衛星。圓錐搜索算法的船載天線波束的運動軌跡如圖5所示。

3監控系統設計
前文已經說明支撐監控系統所需要的硬件配置,這里對監控系統本身進行說明。可以在選型為AT91SAM9263的ARM芯片中移植嵌入式Linux操作系統,主要考慮到它具有可裁剪、多用戶、多任務、設備文件化以及適合小型嵌入式系統等優點。利用嵌入式Linux操作系統的網絡功能,還要在ARM芯片中移植Web服務器Boa,Boa是一個非常小巧的網頁服務器。由于嵌入式系統本身對數據的存儲和程序運行空間有較大的限制等特點,所以采用嵌入式SQLite數據庫。客戶端瀏覽器與網絡服務器之間的信息傳遞規范采用通用網關接口(Common Gateway Interface,CGI),它的主要功能是從瀏覽器的表單中解析出有用成分,再將解析的結果與服務器數據結合在一起,以布局整潔的網頁呈現給用戶。
客戶端用戶在瀏覽器的地址欄中輸入Web服務器的IP地址,瀏覽器與服務器之間就會通過HTTP協議建立連接。連接建立之后,瀏覽器就能發送表單請求,每當服務器端接收到請求之后,服務器Boa就會創建新的CGI進程來處理請求。一方面,CGI程序能夠獲得來自服務器的數據,另一方面,CGI程序所產生的數據又能夠經由標準輸入、標準輸出返回給服務器。服務器端的CGI程序還能夠通過消息緩存隊列與控制系統進行交互,將用戶要求發送給控制程序,控制程序根據用戶需求驅動電機完成對星動作。
監控系統通過Ajax技術和CGI為用戶提供良好的用戶體驗。為了使監控系統適應不同的客戶端設備,在網頁設計中,必須采用不同網頁分辨率的自適應技術。
4結束語
本文主要對船載衛星通信系統的硬件、隨動系統的控制策略以及目標衛星的搜索跟蹤算法進行研究與設計。在搖擺臺上進行了重復試驗,船載天線能在2 min左右跟蹤到目標衛星,檢測到的目標衛星AGC信號波動范圍小于0.5 dB。由于陀螺儀零點漂移引起的丟星現象也得到了有效的改善;并且通過瀏覽器監控系統,使其擁有更好的用戶體驗。














 工商網監
工商網監
評論