激光位移傳感器的原理介紹?
激光位移傳感器分為激光三角測(cè)量法和激光回波分析法,激光三角測(cè)量法一般適用于高精度、短距離的測(cè)量,而激光回波分析法則用于遠(yuǎn)距離測(cè)量。?
1、激光三角測(cè)量法原理?
如圖1所示,激光三角測(cè)量法原理是,用一束激光以某一角度聚焦在被測(cè)物體表面,然后從另一角度對(duì)物體表面上的激光光斑進(jìn)行成像,物體表面激光照射點(diǎn)的位置高度不同,所接受散射或反射光線的角度也不同,用CCD光電探測(cè)器測(cè)出光斑像的位置,就可以計(jì)算出主光線的角度,從而計(jì)算出物體表面激光照射點(diǎn)的位置高度。當(dāng)物體沿激光線方向發(fā)生移動(dòng)時(shí),測(cè)量結(jié)果就將發(fā)生改變,從而實(shí)現(xiàn)用激光測(cè)量物體的位移。過(guò)去,由于成本和體積等問(wèn)題的限制,其應(yīng)用未能普及。隨著近年來(lái)電子技術(shù)的飛速發(fā)展,特別是半導(dǎo)體激光器和CCD等圖像探測(cè)用電子芯片的發(fā)展,激光三角位移傳感器在性能改進(jìn)的同時(shí),體積不斷縮小,成本不斷降低,正逐步從研究走向?qū)嶋H應(yīng)用,從實(shí)驗(yàn)室走向?qū)嶋H。

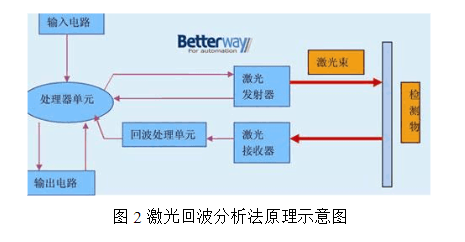
2、激光回波分析法原理
如圖2所示,激光位移傳感器采用回波分析原理來(lái)測(cè)量距離以達(dá)到一定程度的精度。傳感器內(nèi)部是由處理器單元、回波處理單元、激光發(fā)射器、激光接收器等部分組成。激光位移?傳感器通過(guò)激光發(fā)射器每秒發(fā)射一百萬(wàn)個(gè)激光脈沖到檢測(cè)物并返回至接收器,處理器計(jì)算激光脈沖遇到檢測(cè)物并返回至接收器所需的時(shí)間,以此計(jì)算出距離值,該輸出值是將上千次的測(cè)量結(jié)果進(jìn)行的平均輸出。激光回波分析法適合于長(zhǎng)距離檢測(cè),但測(cè)量精度相對(duì)于激光三角測(cè)量法要低。
激光位移傳感器參數(shù)介紹?
目前市場(chǎng)上的激光位移傳感器可謂玲瑯滿目,其產(chǎn)品性能參數(shù)也是參差不齊,下面以我們較為熟悉的美國(guó)MTI激光位移傳感器(圖3所示)為例,簡(jiǎn)單介紹一下激光位移傳感器的性能參數(shù)。美國(guó)MTI激光位移傳感器是激光三角測(cè)量法的激光產(chǎn)品,具有該類型激光位移傳感器高精度、短距離的共性。
1、量程有2、4、10、20、40、100、200mm可供選擇;?
2、線性度為0.03%滿量程;?
3、分辨率最小可達(dá)±0.0381um;?
4、采樣頻率為40KHZ,響應(yīng)頻率為0-20KHZ;?
5、數(shù)字輸出:RS-485,模擬電壓輸出為0-10V;?
6、供電電壓:15-28V。