") 汽車噴涂車間里怎么突破機械臂遠(yuǎn)程無線控制這一難題?
汽車噴涂車間里怎么突破機械臂遠(yuǎn)程無線控制這一難題?
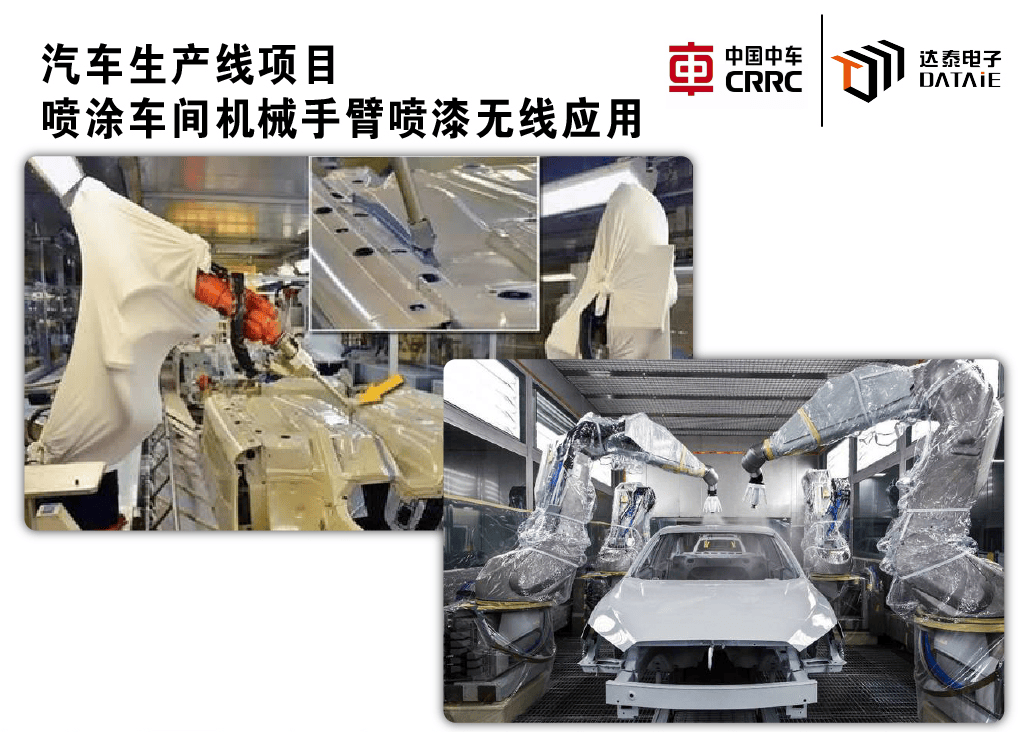
在汽車生產(chǎn)裝配工藝中,機械臂目前已經(jīng)廣泛地應(yīng)用于裝配、搬運等工業(yè)生產(chǎn)中,在機械臂系列產(chǎn)品中,汽車噴漆自動控制噴涂機械裝置以其獨特的優(yōu)勢,能夠根據(jù)油漆噴涂量的大小,嚴(yán)格控制噴嘴與噴漆面之間距離等影響噴漆效果的因素,從而達(dá)到良好的噴漆效果;其二由于溶劑型油漆和涂料具有揮發(fā)性和危險性,因此在噴涂應(yīng)用中使用機械手可以較大程度地減少人與人的接觸;其三噴涂機械臂的顯著優(yōu)點是可以同時在同一生產(chǎn)線上混線生產(chǎn)多種車型,提升了涂裝的自動化程度及生產(chǎn)效率。
與人工操作相比,工業(yè)機器人機械手臂可以節(jié)省人工成本,提高勞動安全性和設(shè)備安全性,保證產(chǎn)品重復(fù)性、危險性和節(jié)拍性高的加工行業(yè)的產(chǎn)品質(zhì)量、產(chǎn)量和各工序的穩(wěn)定性,進一步提高汽車生產(chǎn)的自動化水平。
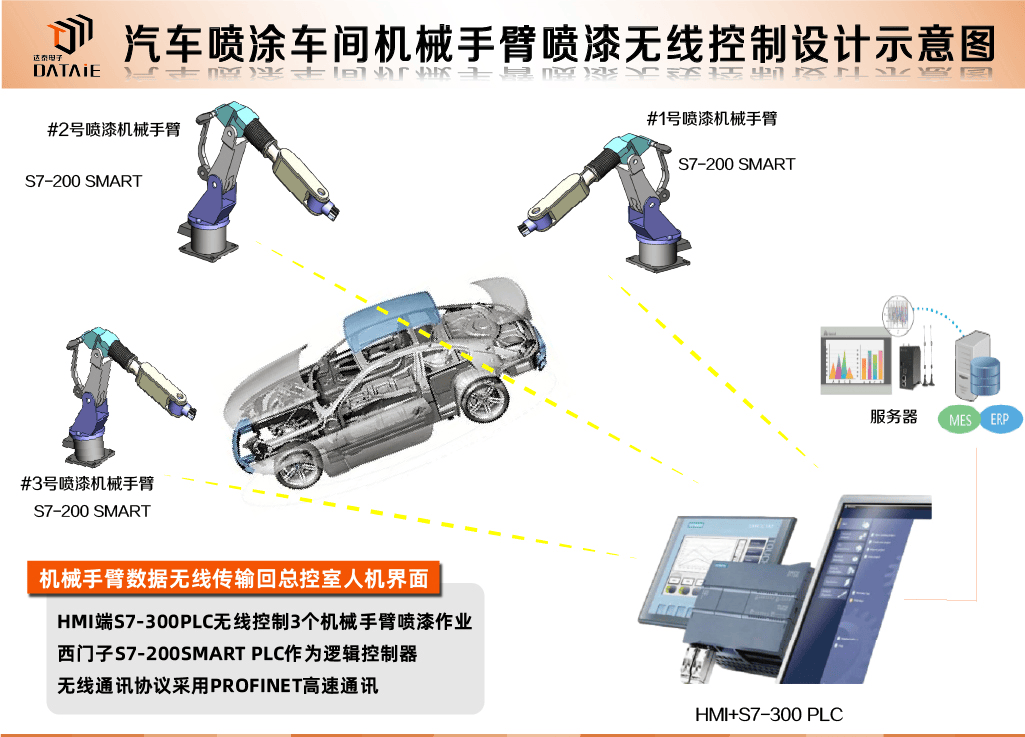
生產(chǎn)線的噴涂車間的噴涂機械手臂需要實現(xiàn)無線控制。噴涂車間有3臺噴涂機械手臂同時作業(yè),由車間旁的控制臺HMI來遠(yuǎn)程無線控制完成汽車及其零部件的噴涂工作。由于噴涂車間油漆涂料具有腐蝕性,不方便布線,因此采用無線方式來實現(xiàn)車間控制臺HMI與3臺噴涂機械臂之間的無線通訊要求,從而提升了涂裝的安全穩(wěn)定性及生產(chǎn)效率。
由于現(xiàn)場噴涂工作環(huán)境復(fù)雜,機械臂的靈活性以及復(fù)合運動的作業(yè)軌跡。同時無線方案的設(shè)計還需考慮到同時控制多臺機械手臂一同作業(yè)控制精準(zhǔn),不出現(xiàn)混亂,能夠?qū)崿F(xiàn)穩(wěn)定和高實時性的數(shù)據(jù)交互,避免出現(xiàn)相互干擾,誤動作,通訊延遲等狀況。
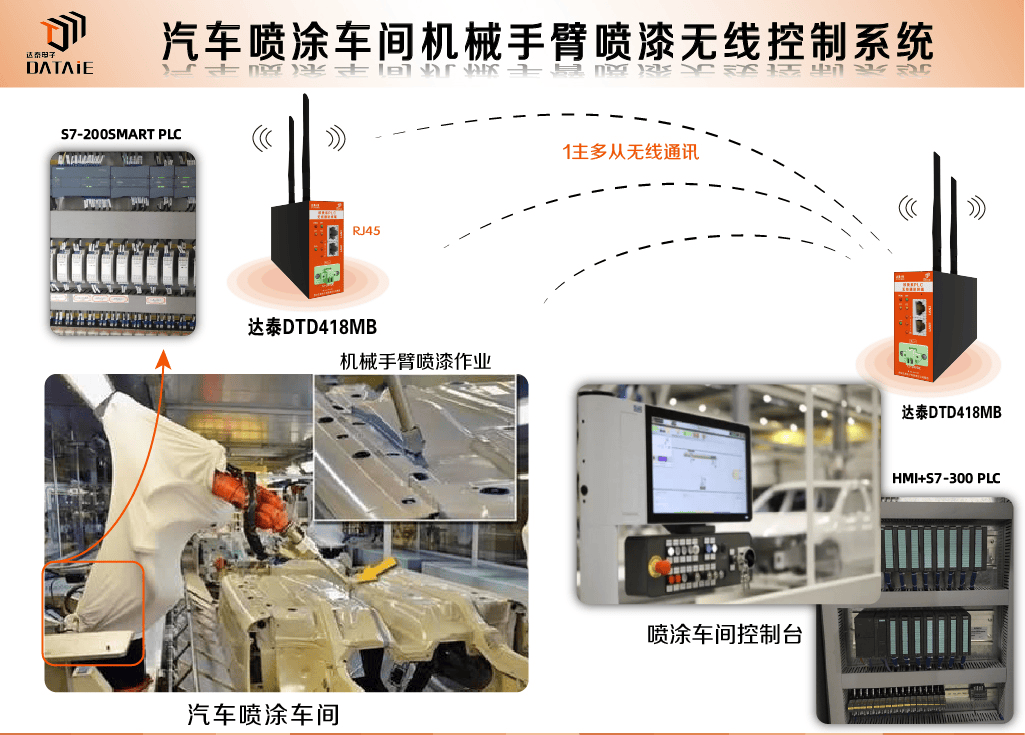
考慮上述因素,決定使用4塊西門子PLC無線通訊終端,通過Rj45接口在Profinet協(xié)議下,完成控制臺HMI內(nèi)S7-300 PLC與噴涂機械臂S7-200SMART的無線數(shù)據(jù)交互工作。在控制臺HMI端的S7-300PLC及3臺噴涂機械臂的S7-200SMART端分別安裝一塊西門子PLC無線通訊終端,即可以實現(xiàn)控制柜與3臺噴涂機械臂之間信息無線傳輸,實現(xiàn)控制臺HMI可以同時控制多臺機械手臂一同作業(yè)。無線通訊方案示意圖 ▼
審核編輯 黃宇
-
無線通訊
+關(guān)注
關(guān)注
5文章
588瀏覽量
40360 -
無線控制
+關(guān)注
關(guān)注
0文章
96瀏覽量
20010 -
機械臂
+關(guān)注
關(guān)注
12文章
520瀏覽量
24726
發(fā)布評論請先 登錄
相關(guān)推薦
如何使用PLC控制myCobot 320機械臂

完美CP來啦!當(dāng)AGV遇上機械臂!
往復(fù)噴涂機遠(yuǎn)程監(jiān)控運維管理系統(tǒng)方案
RK3568國產(chǎn)實驗箱+人工智能機械臂:跳舞、疊羅漢、夾方塊、積木搬運案例全解!

機械臂的高效運作,連接器起關(guān)鍵作用
遠(yuǎn)程IO常見報錯及解決方案,輕松應(yīng)對遠(yuǎn)程控制難題
大象機器人開源協(xié)作機械臂機械臂接入GPT4o大模型!

國產(chǎn)Cortex-A55人工智能教學(xué)實驗箱_基于Python機械臂跳舞實驗案例分享
基于六維力傳感器的機械臂自動裝配應(yīng)用

PLC無線通訊技術(shù)在汽車噴涂車間機械手臂上的應(yīng)用
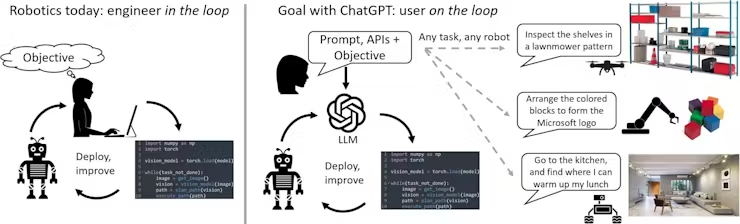
自然語言控制機械臂:ChatGPT與機器人技術(shù)的融合創(chuàng)新(下)

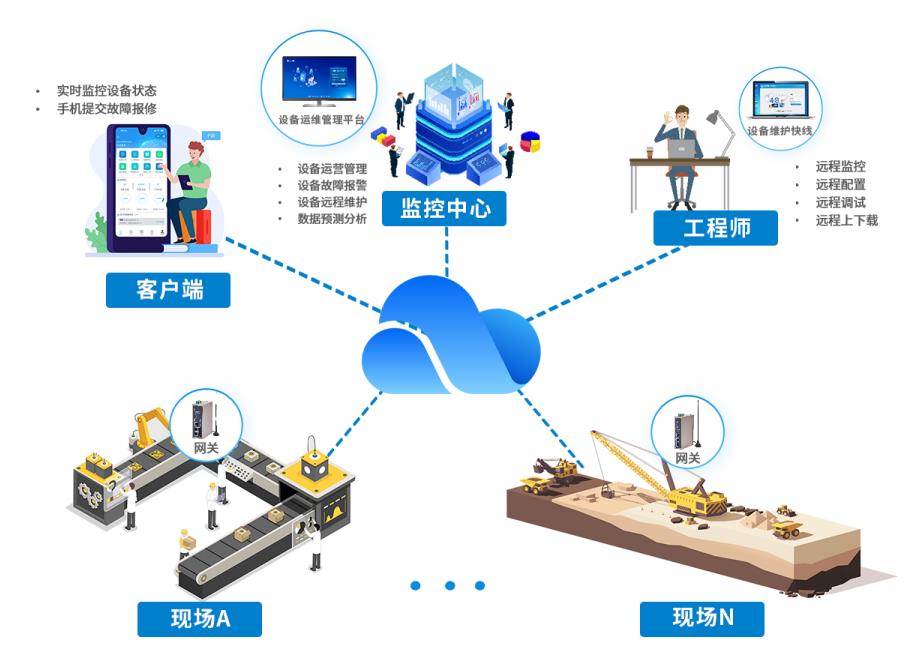
工業(yè)網(wǎng)關(guān)的數(shù)字化車間機械手和工業(yè)生產(chǎn)設(shè)備遠(yuǎn)程監(jiān)控解決方案應(yīng)用

機械臂技術(shù)的前沿探索:年度案例回顧!

如何去提升機械臂的位置控制性能






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論