") BLDC電機(jī)驅(qū)動(dòng)電路圖 BLDC電機(jī)的工作原理和基本組成
BLDC電機(jī)驅(qū)動(dòng)電路圖 BLDC電機(jī)的工作原理和基本組成
BLDC電機(jī),即無(wú)刷直流電機(jī),是一種利用電子換向器進(jìn)行換向的直流電機(jī)。相較于傳統(tǒng)的有刷直流電機(jī),BLDC電機(jī)以其高效率、高可靠性、低噪音和低維護(hù)成本等優(yōu)點(diǎn),在現(xiàn)代工業(yè)和科技領(lǐng)域得到了廣泛應(yīng)用。
BLDC電機(jī)的工作原理可以概括為:通過(guò)電子換向器控制定子上的電流,從而驅(qū)動(dòng)轉(zhuǎn)子旋轉(zhuǎn)。具體來(lái)說(shuō),其工作原理可以分為以下幾個(gè)步驟:
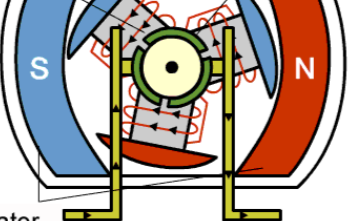
電流產(chǎn)生磁場(chǎng):在BLDC電機(jī)中,定子由多個(gè)線(xiàn)圈(或稱(chēng)為繞組)組成,這些線(xiàn)圈通過(guò)電源供電后會(huì)產(chǎn)生磁場(chǎng)。
磁場(chǎng)與永磁體作用:轉(zhuǎn)子由永磁體構(gòu)成,其磁極方向固定。當(dāng)定子產(chǎn)生的磁場(chǎng)與轉(zhuǎn)子永磁體的磁場(chǎng)相互作用時(shí),會(huì)產(chǎn)生一個(gè)力矩(或稱(chēng)為轉(zhuǎn)矩),推動(dòng)轉(zhuǎn)子旋轉(zhuǎn)。
電子換向器控制:為了實(shí)現(xiàn)轉(zhuǎn)子的連續(xù)旋轉(zhuǎn),需要不斷地改變定子上的電流方向,使得產(chǎn)生的磁場(chǎng)方向也隨之變化。這一過(guò)程由電子換向器完成。電子換向器根據(jù)轉(zhuǎn)子的位置信息,按照一定的順序控制定子線(xiàn)圈的通電和斷電,從而實(shí)現(xiàn)電流的換向。
位置檢測(cè)與反饋:為了準(zhǔn)確地控制電子換向器的工作,需要知道轉(zhuǎn)子的實(shí)時(shí)位置。這通常通過(guò)位置傳感器(如霍爾效應(yīng)傳感器)實(shí)現(xiàn)。位置傳感器將檢測(cè)到的轉(zhuǎn)子位置信息反饋給電子換向器,電子換向器根據(jù)這些信息調(diào)整定子線(xiàn)圈的通電順序和電流方向。
二、BLDC電機(jī)的基本組成
BLDC電機(jī)主要由定子、轉(zhuǎn)子、位置傳感器和電子換向電路等部分組成。下圖顯示了 BLDC 電機(jī)的橫截面。
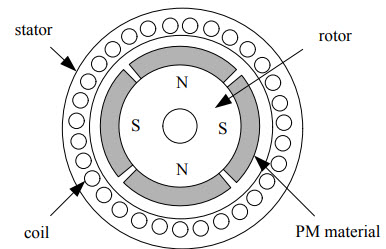
1、定子
定子是BLDC電機(jī)的固定部分,主要由硅鋼片、漆包線(xiàn)等構(gòu)成。硅鋼片作為定子的鐵芯,其內(nèi)部沿軸向開(kāi)鑿有多個(gè)槽,用于放置漆包線(xiàn)繞組。定子繞組通常采用多相(如三相、四相或五相)繞組形式,以便產(chǎn)生旋轉(zhuǎn)磁場(chǎng)。繞組的線(xiàn)圈數(shù)、繞制方式等參數(shù)對(duì)電機(jī)的性能有著重要影響。
據(jù)相關(guān)數(shù)據(jù)顯示,常見(jiàn)的定子繞組分布方式有梯形和正弦波繞組兩種。梯形繞組產(chǎn)生的反電動(dòng)勢(shì)波形為梯形,而正弦波繞組則產(chǎn)生正弦波反電動(dòng)勢(shì)。這兩種繞組方式各有優(yōu)缺點(diǎn),梯形繞組在低速時(shí)性能較好,而正弦波繞組則在高速時(shí)表現(xiàn)更佳。
2、轉(zhuǎn)子
轉(zhuǎn)子是BLDC電機(jī)的旋轉(zhuǎn)部分,主要由永磁體構(gòu)成。永磁體通常采用稀土永磁材料,具有高磁能積、高矯頑力等特點(diǎn)。轉(zhuǎn)子的磁極對(duì)數(shù)(2P)通常為2、4、6等偶數(shù),磁極按照N極和S極交替排列。轉(zhuǎn)子的磁極對(duì)數(shù)和磁通量對(duì)電機(jī)的性能有直接影響。
此外,轉(zhuǎn)子的結(jié)構(gòu)形式也是多樣的,包括傳統(tǒng)的內(nèi)轉(zhuǎn)子結(jié)構(gòu)、外轉(zhuǎn)子結(jié)構(gòu)和線(xiàn)性結(jié)構(gòu)等。不同的結(jié)構(gòu)形式適用于不同的應(yīng)用場(chǎng)景和性能要求。
3、位置傳感器
位置傳感器用于檢測(cè)轉(zhuǎn)子的位置信息,是實(shí)現(xiàn)電機(jī)無(wú)刷控制的關(guān)鍵部件。常見(jiàn)的位置傳感器有光電式、磁敏式和電磁式三種類(lèi)型。其中,光電式位置傳感器具有高精度、高可靠性等優(yōu)點(diǎn),但成本較高;磁敏式位置傳感器成本較低,但精度和可靠性稍遜于光電式;電磁式位置傳感器則適用于一些特殊的應(yīng)用場(chǎng)景。
位置傳感器的輸出信號(hào)被電子換向電路用來(lái)控制定子繞組的通電順序和電流方向,從而實(shí)現(xiàn)電機(jī)的無(wú)刷控制。
4、電子換向電路
電子換向電路是BLDC電機(jī)的控制核心,其作用是根據(jù)位置傳感器的輸出信號(hào)控制定子繞組的通電順序和電流方向。電子換向電路通常由功率電子器件(如MOSFET、IGBT等)、控制電路和驅(qū)動(dòng)電路等組成。其中,功率電子器件用于控制定子繞組的通電和斷電;控制電路則根據(jù)位置傳感器的輸出信號(hào)產(chǎn)生相應(yīng)的控制信號(hào);驅(qū)動(dòng)電路則將控制信號(hào)轉(zhuǎn)換為能夠驅(qū)動(dòng)功率電子器件的信號(hào)。
電子換向電路的性能直接影響到電機(jī)的運(yùn)行效率和穩(wěn)定性。現(xiàn)代BLDC電機(jī)通常采用先進(jìn)的控制算法和驅(qū)動(dòng)技術(shù)來(lái)提高電子換向電路的性能和可靠性。
三、BLDC電機(jī)的性能特點(diǎn)
高效率:由于BLDC電機(jī)采用電子換向器替代了傳統(tǒng)的機(jī)械換向器,消除了機(jī)械摩擦和磨損,從而大大提高了電機(jī)的效率。同時(shí),通過(guò)精確的電流控制和磁場(chǎng)優(yōu)化,BLDC電機(jī)能夠在更寬的轉(zhuǎn)速范圍內(nèi)保持高效率。根據(jù)相關(guān)研究,BLDC電機(jī)的效率通常可達(dá)到80%以上,遠(yuǎn)高于傳統(tǒng)有刷直流電機(jī)。
高可靠性:由于BLDC電機(jī)沒(méi)有機(jī)械換向器和電刷等易損件,因此其壽命更長(zhǎng)、可靠性更高。此外,BLDC電機(jī)還采用了先進(jìn)的電子控制系統(tǒng)和故障診斷技術(shù),能夠及時(shí)發(fā)現(xiàn)和排除潛在故障,進(jìn)一步提高電機(jī)的可靠性。
低噪音:由于BLDC電機(jī)沒(méi)有機(jī)械換向器和電刷等運(yùn)動(dòng)部件產(chǎn)生的噪音,因此其噪音水平較低。這對(duì)于需要低噪音運(yùn)行的應(yīng)用場(chǎng)景(如家用電器、醫(yī)療設(shè)備等)尤為重要。
精確控制:BLDC電機(jī)的電子控制系統(tǒng)能夠?qū)崿F(xiàn)精確的電流和磁場(chǎng)控制,從而實(shí)現(xiàn)對(duì)轉(zhuǎn)速、轉(zhuǎn)矩和位置的精確控制。這使得BLDC電機(jī)在需要高精度控制的應(yīng)用中(如無(wú)人機(jī)、機(jī)器人等)具有明顯優(yōu)勢(shì)。
寬調(diào)速范圍:由于BLDC電機(jī)采用電子換向器控制電流方向,因此其調(diào)速范圍更寬。通過(guò)調(diào)整定子線(xiàn)圈的通電順序和電流大小,可以實(shí)現(xiàn)電機(jī)從低速到高速的平滑過(guò)渡。這一特點(diǎn)使得BLDC電機(jī)在需要寬調(diào)速范圍的應(yīng)用中(如電動(dòng)汽車(chē)、電動(dòng)工具等)具有廣泛應(yīng)用前景。
環(huán)保節(jié)能:由于BLDC電機(jī)具有高效率、低噪音和低維護(hù)成本等優(yōu)點(diǎn),因此其在使用過(guò)程中能夠減少能源消耗和環(huán)境污染。此外,BLDC電機(jī)還采用了先進(jìn)的控制算法和驅(qū)動(dòng)技術(shù),能夠進(jìn)一步優(yōu)化能源消耗和降低碳排放。
BLDC電機(jī)以其獨(dú)特的工作原理和優(yōu)越的性能特點(diǎn),在現(xiàn)代工業(yè)和科技領(lǐng)域得到了廣泛應(yīng)用。隨著技術(shù)的不斷進(jìn)步和應(yīng)用領(lǐng)域的不斷拓展,BLDC電機(jī)將在未來(lái)發(fā)揮更加重要的作用。未來(lái),隨著新材料、新工藝和新技術(shù)的不斷涌現(xiàn),BLDC電機(jī)的性能將得到進(jìn)一步提升,應(yīng)用領(lǐng)域也將更加廣泛。
四、簡(jiǎn)單的BLDC電機(jī)驅(qū)動(dòng)電路圖
如上所述,電子控制器電路通過(guò)接通晶體管或其他固態(tài)開(kāi)關(guān)來(lái)給適當(dāng)?shù)碾姍C(jī)繞組供電,以使電機(jī)連續(xù)旋轉(zhuǎn)。下圖所示為簡(jiǎn)單的 BLDC 電機(jī)驅(qū)動(dòng)電路,該電路由 MOSFET 橋(也稱(chēng)為逆變橋)、電子控制器、霍爾效應(yīng)傳感器和 BLDC 電機(jī)組成。
此處,霍爾效應(yīng)傳感器用于位置和速度反饋。電子控制器可以是微控制器單元或微處理器或DSP處理器或FPGA單元或任何其他控制器。該控制器接收這些信號(hào),對(duì)其進(jìn)行處理并將控制信號(hào)發(fā)送到 MOSFET 驅(qū)動(dòng)電路。
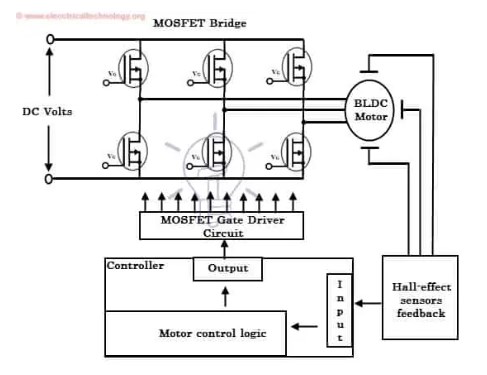
除了切換電機(jī)的額定速度之外,附加電子電路還可以根據(jù)所需的應(yīng)用來(lái)改變電機(jī)速度。這些速度控制單元通常采用PID控制器來(lái)實(shí)現(xiàn)精確控制。還可以通過(guò)電機(jī)進(jìn)行四象限運(yùn)行,同時(shí)使用現(xiàn)代驅(qū)動(dòng)器在整個(gè)速度變化中保持良好的效率。
五、如何正確驅(qū)動(dòng)無(wú)刷直流電機(jī)
如果定子和轉(zhuǎn)子是 BLDC 電機(jī)不可或缺的重要部件,那么驅(qū)動(dòng)電子設(shè)備也同樣重要。典型無(wú)刷直流電機(jī)控制或驅(qū)動(dòng)系統(tǒng)的框圖如下圖所示。
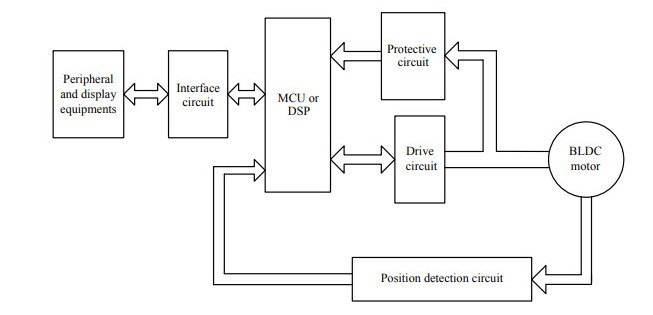
該驅(qū)動(dòng)電路通常稱(chēng)為電子速度控制器系統(tǒng)或簡(jiǎn)稱(chēng)為 ESC。一種常見(jiàn)的設(shè)置稱(chēng)為全橋驅(qū)動(dòng)電路。它由具有 PWM 輸出的 MCU、用于定子繞組三相的6 個(gè)MOSFET 、來(lái)自霍爾傳感器的反饋以及一些電源相關(guān)組件組成。
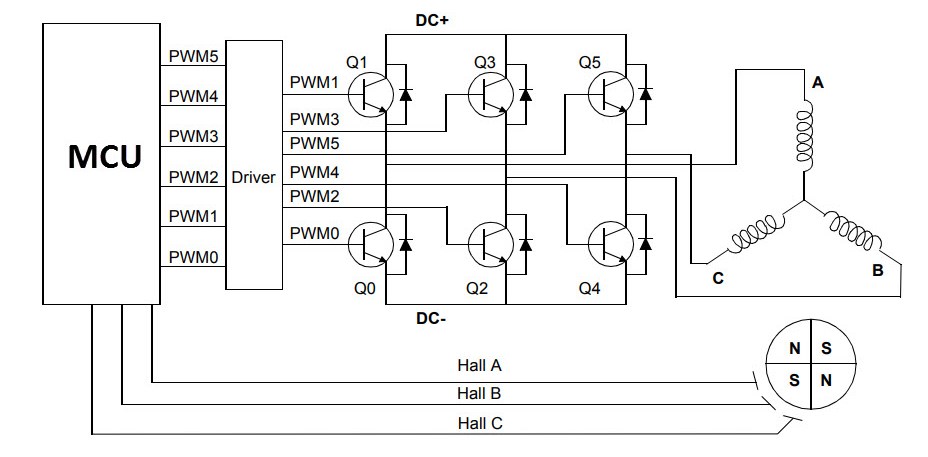
MCU 可以編程為根據(jù)霍爾傳感器的數(shù)據(jù)適當(dāng)?shù)厍袚Q MOSFET。
-
線(xiàn)圈
+關(guān)注
關(guān)注
14文章
1839瀏覽量
44630 -
BLDC電機(jī)
+關(guān)注
關(guān)注
7文章
214瀏覽量
21613 -
驅(qū)動(dòng)電路圖
+關(guān)注
關(guān)注
0文章
8瀏覽量
9816
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
三相BLDC電機(jī)的工作原理是什么?BLDC電機(jī)通過(guò)什么驅(qū)動(dòng)?
無(wú)刷直流(BLDC)電機(jī)的工作原理是什么
什么是BLDC電機(jī)?BLDC電機(jī)是如何旋轉(zhuǎn)的?
BLDC直流無(wú)刷電機(jī)驅(qū)動(dòng)

bldc電機(jī)什么意思 bldc電機(jī)和fpa直驅(qū)電機(jī)哪個(gè)好

bldc電機(jī)是變頻電機(jī)嗎 bldc的控制方式
BLDC電機(jī)的驅(qū)動(dòng)原理詳解





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論